
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (3.4) |
Силы ![]() и
и ![]() появляющиеся при взаимодействии тел, приложены к разным телам и поэтому по отношению к конкретному физическому телу силы действия и противодействия не могут уравновешивать друг друга.
появляющиеся при взаимодействии тел, приложены к разным телам и поэтому по отношению к конкретному физическому телу силы действия и противодействия не могут уравновешивать друг друга.
Для системы тел или материальных точек взаимодействие сводится к силам парного взаимодействия между ними, которое по третьему закону Ньютона всегда равны по модулю и противоположны по направлению, вследствие чего геометрическая сумма всех внутренних сил исходной системы будет равна нулю.
![]()
В частности ![]() .
.
3.10. Преобразование координат Галилея и механический принцип относительности
Рассмотрим две системы отсчета: неподвижную (К) и движущуюся относительно первой вдоль оси Х с постоянной Х с постоянной скоростью ![]() (K’). Координаты тела М в системе К x:y:z, а в системе К’ - x’:y’:z’. Эти координаты связаны между собой соотношениями, которые называются преобразованием Галилея
(K’). Координаты тела М в системе К x:y:z, а в системе К’ - x’:y’:z’. Эти координаты связаны между собой соотношениями, которые называются преобразованием Галилея

Дифференцируя эти уравнения по времени и учитывая, что  , найдем соотношения между скоростями и ускорениями:
, найдем соотношения между скоростями и ускорениями:
|
|
|
|
|
|
Таким образом, если в системе К тело имеет ускорение а, то такое же ускорение оно имеет и в системе К’.
Согласно второму закону Ньютона:
![]()
т. е. второй закон Ньютона одинаков в обоих случаях.
При ![]() движение по инерции, т. о., справедлив и первый закон Ньютона, т. е. рассматриваемая нами подвижная система является инерциальной.
движение по инерции, т. о., справедлив и первый закон Ньютона, т. е. рассматриваемая нами подвижная система является инерциальной.
Следовательно, уравнения Ньютона для материальной точки, а также для произвольной системы материальных точек одинаковы во всех инерциальных системах отсчета - инвариантны по отношению к преобразованиям Галилея.
Этот результат называется механическим принципом относительности (принцип относительности Галилея), и формулируется следующим образом:
равномерное и прямолинейное движение (относительно какой-либо инерциальной системы отсчета) замкнутой системы не влияет на закономерности протекания в ней механических процессов.
Следовательно, в механике все инерциальные системы отсчета совершенно равноправны. Поэтому никакими механическими опытами внутри системы нельзя обнаружить движется ли система равномерно и прямолинейно или покоится.
3.11.Изолированная (замкнутая) система. Закон сохранения импульса
Закон сохранения импульса является следствием второго и третьего законов Ньютона. Он имеет место в изолированной (замкнутой) системе тел. Закон сохранения импульса можно получить из второго закона Ньютона.
Рассмотрим механическую систему, состоящую из ![]() тел, каждое из которых характеризуется некоторой массой
тел, каждое из которых характеризуется некоторой массой ![]() и скоростью
и скоростью ![]() . Пусть
. Пусть ![]() - равнодействующая всех внутренних сил, действующих на
- равнодействующая всех внутренних сил, действующих на  - тое тело системы,
- тое тело системы, ![]() - равнодействующая всех внешних сил, действующих на
- равнодействующая всех внешних сил, действующих на ![]() - тое тело системы.
- тое тело системы.
Внутренними называются силы взаимодействия между телами, входящими в состав системы.
Внешними называются силы, действующие на тело системы со стороны тел, не входящих в эту систему.
Запишем второй закон Ньютона для каждого из тел системы:
![]()
Складывая почленно все уравнения, получаем для всей системы:
![]()
Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то
![]()
или
![]() ,
,
где  - суммарный импульс системы
- суммарный импульс системы ![]() тел.
тел.
Производная по времени от импульса механической системы тел равна векторной сумме внешних сил, действующих на тела системы.
В случае замкнутой системы, т. е. в отсутствии внешних сил
![]()
откуда следует, что,
![]()
т. е. полный вектор импульса ![]() замкнутой системы тел не изменяется с течением времени.
замкнутой системы тел не изменяется с течением времени.
В замкнутой системе физических тел векторная сумма импульсов всех тел, остается постоянной величиной при любых взаимодействиях тел этой системы между собой. Это значит, что если у одного из тел в изолированной системе изменился импульс, то это могло произойти только за счет изменения импульсов других тел этой системы.
Такой системой называется механическая система, на каждое из тел которой не действуют внешние силы. В изолированной системе проявляются внутренние силы, т. е. силы взаимодействия между телами, входящими в систему.
Так как в замкнутой системе внешние силы отсутствуют, то
![]()
![]()
или
| (3.13) |
Это равенство выражает закон сохранения импульса, согласно которому полный вектор импульса замкнутой системы тел с течением времени не изменяется.
Т. к., ![]() то при любых процессах, происходящих в замкнутой системе, скорость ее центра инерции сохраняется неизменной.
то при любых процессах, происходящих в замкнутой системе, скорость ее центра инерции сохраняется неизменной.
3.12. Методические указания к решению задач по динамике
В классической физике, как было уже показано, состояние материальной точки полностью определяется ее координатами х, у, z. и компонентами скорости ![]() в заданный момент времени, т. е. радиусом вектором частицы
в заданный момент времени, т. е. радиусом вектором частицы ![]() и ее скоростью.
и ее скоростью.
С учетом указанных функциональных зависимостей второй закон Ньютона и имеет следующий вид:
| (3.14) |
Если считать, что результирующая сила ![]() как функция координат и времени известна, то уравнение (3.14) в математической классификации представляет собой векторное дифференциальное уравнение второго порядка по отношению к радиус-вектору
как функция координат и времени известна, то уравнение (3.14) в математической классификации представляет собой векторное дифференциальное уравнение второго порядка по отношению к радиус-вектору ![]() материальной точки. Решая уравнение (3.14) с заданной правой частью, можно определить радиус-вектор тела в любой момент времени и, тем самым, установить вид траектории движения тела. При этом, исходя из принципа независимости движения, сложное векторное уравнение (3.14), определяющее в общем случае криволинейное движение тела, заменяют эквивалентной системой трех уравнений, каждое из которых одновременно описывает прямолинейное движение вдоль соответствующих осей х, у и z.
материальной точки. Решая уравнение (3.14) с заданной правой частью, можно определить радиус-вектор тела в любой момент времени и, тем самым, установить вид траектории движения тела. При этом, исходя из принципа независимости движения, сложное векторное уравнение (3.14), определяющее в общем случае криволинейное движение тела, заменяют эквивалентной системой трех уравнений, каждое из которых одновременно описывает прямолинейное движение вдоль соответствующих осей х, у и z.
| (3.15) |
где ![]() ,
, ![]() и
и ![]() - проекции вектора
- проекции вектора ![]() на координатные оси.
на координатные оси.
Координаты х, у и z определяют путем двух интегрирований уравнения (3.15). При каждом интегрировании возникает неопределенная постоянная. Поэтому для однозначного выделения закона движения следует уравнения движения дополнить двумя условиями, определяющими эти постоянные. Эти условия фиксируют, задавая состояние материальной точки в какой-то (обычно в начальный) момент времени, т. е. указывая значения радиус-вектора ![]() или координат
или координат ![]() и скорости
и скорости ![]() при t=0.
при t=0.
Таким образом, в результат интегрирования уравнений (3.15) получаем координаты х, у, z как функции времени и двух констант интегрирования:
Раздел: Динамика вращательного движения твердого тела
4. Динамика вращательного движения твердого тела. Введение
4.1. Особенности вращательного движения
4.2. Вращающий момент (или момент силы)
4.3. Момент инерции материальной точки относительно неподвижной оси вращения
4.4. Момент инерции твердого тела
4.5. Второй закон Ньютона для вращательного движения и его анализ
4.6. Момент импульса материальной точки и твердого тела
4.7. Основное уравнение динамики вращательного движения
4.8. Закон сохранения момента количества движения
4.9. Гироскоп. Гироскопический эффект
4.10. Кинетическая энергия вращающегося тела
4.11. Работа внешних сил при вращении твердого тела
4. Динамика вращательного движения твердого тела. Введение
В динамике поступательного движения материальной точки были введены в дополнение к кинематическим величинам, понятия силы и массы. Аналогично, для изучения динамики вращательного движения тела, помимо рассмотренных кинематических характеристик, вводятся новые величины - момент силы, момент инерции и момент импульса.
4.1. Особенности вращательного движения
Рассмотрим движение твердого тела, имеющею ось вращения ![]() под действием произвольно направленной силы
под действием произвольно направленной силы ![]() , приложенной к телу в некоторой точке А, которую можно разложить на две составляющие: вертикальную и горизонтальную (рис.5.1). Вертикальная составляющая может вызывать перемещение тела в направлении оси вращения, поэтому при рассмотрении вращательного движения ее можно исключить. Горизонтальная составляющая
, приложенной к телу в некоторой точке А, которую можно разложить на две составляющие: вертикальную и горизонтальную (рис.5.1). Вертикальная составляющая может вызывать перемещение тела в направлении оси вращения, поэтому при рассмотрении вращательного движения ее можно исключить. Горизонтальная составляющая ![]() , если она не пересекается с осью
, если она не пересекается с осью ![]() вызывает вращение тела. Действие этой силы зависит от ее числового значения и расстояния линии действия от оси вращения.
вызывает вращение тела. Действие этой силы зависит от ее числового значения и расстояния линии действия от оси вращения.
4.2. Вращающий момент (или момент силы)
Пусть на тело, в плоскости перпендикулярной оси вращения ![]() действует сила
действует сила ![]() (рис.5.2). Разложим эту силу на две составляющие:
(рис.5.2). Разложим эту силу на две составляющие: ![]() и
и ![]()
Сила ![]() пересекает ось вращения и, следовательно, не влияет на вращение тела. Под действием составляющей
пересекает ось вращения и, следовательно, не влияет на вращение тела. Под действием составляющей ![]() тело будет совершать вращательное движение вокруг оси
тело будет совершать вращательное движение вокруг оси ![]() .
.
Расстояние ![]() от оси вращения до линии, вдоль которой действует сила,
от оси вращения до линии, вдоль которой действует сила, ![]() называется плечом силы
называется плечом силы ![]() .
.
Моментом силы относительно точки О называется произведение модуля силы ![]() на плечо
на плечо ![]()
![]()
С учетом, что
![]()
момент силы
.
С точки зрения векторной алгебры это выражение представляет векторное произведение радиус-вектора ![]() , проведенного в точку приложения силы
, проведенного в точку приложения силы ![]() на эту силу. Таким образом, момент силы относительно точки О является векторной величиной и равен
на эту силу. Таким образом, момент силы относительно точки О является векторной величиной и равен
| (5.1) |
Вектор момента силы направлен перпендикулярно к плоскости, проведенной через векторы ![]() и
и ![]() , и образует с ними правую тройку векторов (при наблюдении из вершины вектора М видно, что вращение по кратчайшему расстоянию от
, и образует с ними правую тройку векторов (при наблюдении из вершины вектора М видно, что вращение по кратчайшему расстоянию от ![]() к
к ![]() происходит против часовой стрелки).
происходит против часовой стрелки).
В системе «СИ» единицей измерения момента силы называется Ньютон на метр (![]() ).
).
4.3. Момент инерции материальной точки относительно неподвижной оси вращения
Согласно второму закону Ньютона, для тангенциальной составляющей силы ![]() , действующей на материальную точку массой m, и ускорения
, действующей на материальную точку массой m, и ускорения ![]() можем записать
можем записать
![]()
С учетом, что
![]() и
и ![]()
имеем
![]()
Домножим левую и правую части на ![]() и получим
и получим
| (5.2) |
или
![]()
Произведение массы материальной точки ![]() тела на квадрат ее расстояния
тела на квадрат ее расстояния ![]() до оси вращения называется моментом инерции материальной точки относительно оси вращения:
до оси вращения называется моментом инерции материальной точки относительно оси вращения:
| (5.3) |
4.4. Момент инерции твердого тела
Чтобы найти момент инерции тела, надо просуммировать момент инерции всех материальных точек, составляющих данное тело
| (5.4) |
В общем случае, если тело сплошное, оно представляет собой совокупность множества точек с бесконечно малыми массами ![]() , и момент инерции тела определяется интегралом
, и момент инерции тела определяется интегралом
| (5.5) |

где ![]() - расстояние от элемента
- расстояние от элемента ![]() до оси вращения.
до оси вращения.
В системе «СИ» единица измерения момента инерции называется килограмм –метр в квадрате(![]() ).
).
Распределение массы в пределах тела можно охарактеризовать с помощью
плотности
| (5.5) |
где m - масса однородного тела, V - его объем.
Для тела с неравномерно распределенной массой это выражение дает среднюю плотность.
![]()
Плотность в данной точке в этом случае определяется следующим образом
![]()
и тогда
| (5.6) |
Пределы интегрирования зависят от формы и размеров тела Интегрирование уравнения (5.5) наиболее просто осуществить для тех случаев, когда ось вращения проходит через центр тяжести тела.
Рассмотрим результаты интегрирования для простейших (геометрически правильных) форм твердого тела, масса которого равномерно распределена по объему.
Момент инерции полого цилиндра с тонкими стенками, радиуса R.
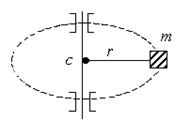
Для полого цилиндра с тонкими стенками
![]()
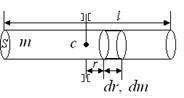
Сплошной однородный диск.
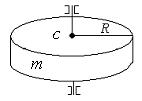
Ось вращения является осью диска радиуса ![]() . и массы m с плотностью
. и массы m с плотностью ![]() Высота диска h. Внутри диска на расстоянии вырежем пустотелый цилиндр с толщиной стенки
Высота диска h. Внутри диска на расстоянии вырежем пустотелый цилиндр с толщиной стенки ![]() и массой
и массой ![]() .
.
Для него
![]()
Весь диск можно разбить на бесконечное множество цилиндров, а затем просуммировать:

Момент инерции шара относительно оси, проходящей через центр тяжести.
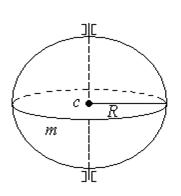
![]()
Момент инерции стержня длиной L и массой m относительно оси, проходящей:
а) через центр стержня - ![]()
б) через начало стержня - ![]()
Теорема Штейнера.
Имеем тело, момент инерции которого относительно оси, проходящей через его центр масс ![]() известен. Необходимо определить момент инерции относительно произвольно оси
известен. Необходимо определить момент инерции относительно произвольно оси ![]() параллельной оси
параллельной оси ![]() .
.
Согласно теореме Штейнера,
момент инерции тела относительно произвольной оси равен сумме момента инерции тела относительно оси, проходящей через центр масс и параллельной данной оси, плюс произведение массы тела на квадрат расстояния между осями:
| (5.7) |
4.5. Второй закон Ньютона для вращательного движения и его анализ
С учетом (5.2) и (5.3) вращающий момент тела
| (5.8) |
или
Это выражение представляет собой аналог второго закона Ньютона для вращательного движения, из которого следует:
Угловое ускорение ![]() твердого тела при вращении вокруг неподвижной оси прямо пропорционально вращающему моменту и обратно пропорционально моменту инерции.
твердого тела при вращении вокруг неподвижной оси прямо пропорционально вращающему моменту и обратно пропорционально моменту инерции.
Относительно этой оси. Из этого выражения следует, что момент инерции ![]() является мерой его инертности во вращательном движении вокруг неподвижной оси. В случае поступательного движения мерой инертности, как известно, является масса тела.
является мерой его инертности во вращательном движении вокруг неподвижной оси. В случае поступательного движения мерой инертности, как известно, является масса тела.
4.6. Момент импульса материальной точки и твердого тела
Векторное произведение радиуса-вектора ![]() материальной точки на ее импульс:
материальной точки на ее импульс: ![]() называют моментом импульса
называют моментом импульса ![]() , этой точки относительно точки О (рис.5.4)
, этой точки относительно точки О (рис.5.4)
В системе «СИ» единицей измерения момента импульса называется килограмм- метр в квадрате на секунду ( ).
).
![]() .
.
Вектор ![]() иногда называют также моментом количества движения материальной точки.
иногда называют также моментом количества движения материальной точки.
Он направлен вдоль оси вращения перпендикулярно плоскости, проведенной через векторы ![]() и
и ![]() и образует с ними правую тройку векторов (при наблюдении из вершины вектора видно, что вращение по кратчайшему расстоянию от
и образует с ними правую тройку векторов (при наблюдении из вершины вектора видно, что вращение по кратчайшему расстоянию от ![]() к
к ![]() происходит против часовой стрелки).
происходит против часовой стрелки).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
