

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() Концептуально МЛМ представляет собой самоходное транспортное средство с колесным, шаговым или гусеничным движителями, а в плавающем варианте – на понтоне. Она оснащена следующими основными навигационным и технологическим оборудованием: манипулятором с держателем для сменных рабочих органов, контейнером со сменными рабочими органами, контейнером с саженцами, ёмкостями с водой, датчиками, аппаратурой навигации и управления и др. (рис. 1).
Концептуально МЛМ представляет собой самоходное транспортное средство с колесным, шаговым или гусеничным движителями, а в плавающем варианте – на понтоне. Она оснащена следующими основными навигационным и технологическим оборудованием: манипулятором с держателем для сменных рабочих органов, контейнером со сменными рабочими органами, контейнером с саженцами, ёмкостями с водой, датчиками, аппаратурой навигации и управления и др. (рис. 1).
МЛМ при лессовостановительных работах на неудобиях должна обеспечивать в автоматическом и (или) полуавтоматическом режимах, выполнение следующих технологических операций:
– мониторинг участка с помощью системы видеокамер, датчиков, и навигационного оборудования [2];
– определение оптимального места посадки саженца с фиксацией его координат в бортовой ЭВМ;
– очистка площадки от поросли и порубочных остатков;
– подготовки лунки или возвышения с защитной зоной;
– посадки саженцев;
– периодический уход за саженцами;
– при необходимости: полив, подкормка, борьба с вредителями растений и др.



![]()

Рис. 1. Схема перспективной многофункциональной лесной машины:
1 – трактор; 2 – стрела манипулятора; 3 – монитор; 4 – бортовая ЭВМ; 5 – антенна;
6 – ёмкость для воды; 7 – универсальный держатель сменных рабочих органов; 8 – видеокамера; 9 – рабочий орган; 10 – датчик сканирования; 11 – датчик определения геопатогенных зон; 12 – ультразвуковой датчик; 13 – датчик определения физико-механических свойств почвы; 14 – контейнер со сменными рабочими органами; 15 – контейнер для саженцев
При функционировании МЛМ в условиях неудобий необходимо учитывать её продольную и поперечную устойчивость. В общем случае под устойчивостью понимается способность машины выдерживать заданное направление в разнообразных дорожных условиях без опрокидывания и скольжения колес. Нарушение устойчивости неизбежно приводит к опрокидыванию МЛМ, вследствие чего возможны ее поломки и травмирование обслуживающего персонала. При движении МЛМ по склону фактические углы наклона местности в продольном и поперечном направлениях движения МЛМ не должны превышать максимально допустимых значений.
Устойчивость МЛМ зависит, как от конструктивных параметров машины, так и от характеристики и состояния опорной поверхности. Продольная устойчивость МЛМ характеризуется критическим углом наклона, который определяется по формуле [3]:
 (1)
(1)
![]() где
где ![]() – максимальный угол наклона в продольной плоскости;
– максимальный угол наклона в продольной плоскости;
 – координаты центра тяжести трактора и технологического оборудования в транспортном положении;
– координаты центра тяжести трактора и технологического оборудования в транспортном положении;
![]() – сила тяжести трактора;
– сила тяжести трактора;
![]() – сила тяжести технологического оборудования;
– сила тяжести технологического оборудования;
V – скорость движения трактора, м/с;
g – м/с2;
t – время трогания с места (t=1 c).
Поперечная устойчивость МЛМ характеризуется предельным углом поперечного наклона по формуле:
 (2)
(2)
где В – ширина колеи трактора;
l – поперечное смещение центра тяжести навесного орудия относительно центра тяжести трактора;
r – радиус кривизны движения агрегата.
С целью устранения опасности опрокидывания агрегата при движении поперек склона фактический угол наклона местности β не должен быть более (0,4…0,6).
Во время движения по прямой продольная и поперечная устойчивость будет обеспечена, если линия действия силы тяжести не выходит за пределы периметра точек опоры транспортного средства (рис. 2, а и б).
Рис. 2. Схемы обеспечения продольной (а) и поперечной (б) устойчивости МЛМ:
ЦТ – центр тяжести; ![]() и
и ![]() – реакции грунта задних и передних колёс;
– реакции грунта задних и передних колёс; ![]() и
и ![]() – силы тяжести трактора и технологического оборудования; α и β – углы наклона опорной поверхности машины в продольной и поперечной плоскостях;
– силы тяжести трактора и технологического оборудования; α и β – углы наклона опорной поверхности машины в продольной и поперечной плоскостях; ![]() и
и ![]() – плечи продольной и поперечной устойчивости
– плечи продольной и поперечной устойчивости
Важно отметить, что МЛМ может потерять продольную (опрокидывание относительно задних или передних колес) и поперечную устойчивость (опрокидывание относительно колес левого или правого бортов), если линия действия силы тяжести пересекается с опорной поверхностью за пределами площади, ограниченной точками опоры колес. Следовательно, устойчивость МЛМ обеспечивается при условии: ![]() >0;
>0; ![]() >0, с учётом динамики движения агрегата, согласно выражениям (1) и (2).
>0, с учётом динамики движения агрегата, согласно выражениям (1) и (2).
Устойчивость движущегося МЛМ зависит от следующих основных факторов: массы транспортного средства и высоты его центра тяжести; базы и ширины колеи; размера шин, их конструкции и состояния; вылета стрелы манипулятора; массы стрелы и многофункциональной головки со сменными рабочими органами; радиусов кривизны дороги и состояния ее поверхности; ветровой нагрузки; технического состояния тормозов; скорости и направления движения машины; квалификации оператора МЛМ.
Очевидно, что, чем выше расположен центр тяжести колёсной машины и чем меньше ширина колеи, тем опрокидывание вероятнее, поэтому для повышения устойчивости МЛМ колея должна быть широкой, а центр тяжести располагаться как можно ниже. Очевидно также, что большую роль на продольную и поперечную устойчивость МЛМ оказывает вылет стрелы манипулятора и вес, как самой стрелы, так и сменной многофункциональной головки. В связи с этим, условия сохранения устойчивости МЛМ, т. е. рабочее пространство максимально возможного вылета стрелы манипулятора, в условиях неудобий будет различным (рис. 3) и определяется геометрией соответствующей эпюры, параметры которой, определяются расчетным путем. Опасная зона (поз. 2 на рис. 3) характеризуется потерей устойчивости и опрокидыванием МЛМ.
1 – рабочее пространство; 2 – опасная зона
а – ровная поверхность; б и в – наклонные поверхность в продольной
и поперечной плоскостях
 Рис. 3. Схемы зон действия стрелы манипулятора МЛМ в зависимости от наклона опорной поверхности трактора
Рис. 3. Схемы зон действия стрелы манипулятора МЛМ в зависимости от наклона опорной поверхности трактора
Устранение этих нежелательных явлений, может быть достигнуто путем обоснования конструктивных рабочих параметров МЛМ для заданных условий её движения ещё на стадии принятия решения и проектирования МЛМ.
Для успешного выполнения лесовосстановительных работ на неудобиях МЛМ должна быть снабжена манипулятором с радиусом действия стрелы, наибольшим из возможных по условию устойчивости принимаемого трактора. Для обеспечения устойчивости МЛМ оборудуется системой управления, которая, автоматически, в режиме реального времени, за счет использования датчиков и бортовой ЭВМ создает и обрабатывает эпюры устойчивости, определяет опасные зоны опрокидывания МЛМ и выдает соответствующие команды для обеспечения безаварийной работы машины. При этом за счет максимального снижения массы выносного технологического оборудования и самой стрелы, в сочетании с установкой ведущих колес трактора на максимальный размер ширины колеи, использования автоматического контроля и управления машиной, а также утяжелением колёс путём заполнения их водой, гарантированную устойчивость агрегата можно обеспечить без применения аутригеров. Это особенно важно, так как в условиях неудобий использование аутригеров малоэффективно из-за большого числа препятствий, неровностей рельефа и слабой несущей способности почвы на таких участках. Кроме этого частые установки и подъемы аутригеров существенно снижают производительность МЛМ, к тому же аутригеры увеличивают габаритные размеры, усложняют и утяжеляют конструкцию машины.
По энерговооруженности, проходимости и маневренности, наиболее приемлемыми и экономически оправданными для МЛМ являются колесные тракторы тяговых классов 9 и 14 кН (Т-40АМ, МТЗ-82, МТЗ-82К и др.). С учетом приведенных обоснований и результатов выполненного предварительного расчета МЛМ на устойчивость по формулам (1) и (2) показал, что в агрегате с трактором Т-40АМ наибольший радиус двухколенной стрелы манипулятора МЛМ может достигать 10-12 м, а с трактором МТЗ-82К – 15-18 м. Это позволяет доставлять сменные рабочие органы МЛМ практически во все труднодоступные места неудобий.
Библиографический список
1. Сухов В. А., Казаков лесокультурных работ на вырубках (рекомендации) / М.: ВНИИЛМ, 20с.
2. Карлащук навигация. Методы и средства / Изд. 2-е переработанное и дополненное. М. : СОЛОН-Пресс, 20с.
3. Бартенев и проектирование лесохозяйственных машин: учеб. пособие / Воронеж : ВГЛТА, 20с.
УДК 631.316:630*231.331
Повышение заглубляющей способности
дисковых рабочих органов путем их принудительной вибрации
,
ГОУ ВПО «Воронежская государственная лесотехническая академия»
Рассмотрены способы заглубления почвообрабатывающих орудий в почву. Предложен энергосберегающий способ вибрационного удержания дисковых рабочих органов на заданной глубине обработки.
Ключевые слова: почвообрабатывающее орудие, дисковый рабочий орган, заглубляющая способность, энергосберегающий способ вибрационного удержания, глубина обработки.
![]() При работе на нераскорчеванных вырубках наиболее энергозатратной операцией является агротехнический уход. Сложность проведения уходов состоит в том, что лесокультурные площади насыщены трудноперерезаемыми корнями, почва сильно задернелая, а в процессе передвижения лесных почвообрабатывающих агрегатов (ЛПА) неизбежны наезды на препятствия. Так, по данным источника [1] на вырубках на глубине до 30 см находится 20…50 % корней, причем на глубине до 20 см – 80…90 %, а количество пней на 1 га составляет соответственно в таежной зоне европейской части страны: 600-800 пней – 45 %; в зоне смешанных лесов 400-600 пней – 50 %; в зоне европейского севера 800 пней – 80 %. Для ухода за лесными культурами в таких специфических условиях используют серийно выпускаемый навесной лесной дисковый культиватор КЛБ-1,7. Однако он и другие дисковые почвообрабатывающие орудия имеют низкую заглубляющую способность, а так же неустойчивы по глубине хода, что существенно снижает качество обработки почвы. Указанной проблеме исследователями уделяется большое внимание, и она все еще остается актуальной.
При работе на нераскорчеванных вырубках наиболее энергозатратной операцией является агротехнический уход. Сложность проведения уходов состоит в том, что лесокультурные площади насыщены трудноперерезаемыми корнями, почва сильно задернелая, а в процессе передвижения лесных почвообрабатывающих агрегатов (ЛПА) неизбежны наезды на препятствия. Так, по данным источника [1] на вырубках на глубине до 30 см находится 20…50 % корней, причем на глубине до 20 см – 80…90 %, а количество пней на 1 га составляет соответственно в таежной зоне европейской части страны: 600-800 пней – 45 %; в зоне смешанных лесов 400-600 пней – 50 %; в зоне европейского севера 800 пней – 80 %. Для ухода за лесными культурами в таких специфических условиях используют серийно выпускаемый навесной лесной дисковый культиватор КЛБ-1,7. Однако он и другие дисковые почвообрабатывающие орудия имеют низкую заглубляющую способность, а так же неустойчивы по глубине хода, что существенно снижает качество обработки почвы. Указанной проблеме исследователями уделяется большое внимание, и она все еще остается актуальной.
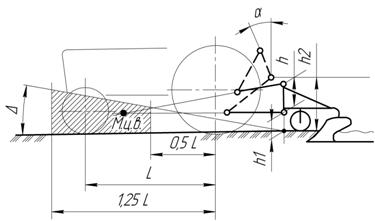
В настоящее время используются три основных способа, позволяющих повысить заглубляющую способность дисковых рабочих органов и стабильно удерживать их на заданной глубине обработки почвы. Первый способ – управление мгновенным центром вращения (МЦВ). МЦВ системы есть мнимая точка пересечения направлений верхней и нижней тяг в вертикальной плоскости. МЦВ в рабочем положении должен лежать в зоне, ограниченной условным углом тяги ∆ (рис. 1а).
Для колесных тракторов классов от 0,6 до 2,0 т условный угол тяги ∆=11°. Линия, проходящая из точки О под углом ∆=11°, является границей зоны, ниже которой должен находиться МЦВ навесного устройства в рабочем положении агрегата. В случае расположения МЦВ выше этой зоны может быть не обеспечено заглубление орудия и его устойчивый ход по глубине. В горизонтальном направлении зона расположения МЦВ ограничивается вертикалями, отстоящими от оси ведущего колеса на расстоянии 0,5 L и 1,25 L, где L – база трактора (оптимальным является расположение МЦВ по середине базы трактора). В этом случае угловые колебания остова трактора, возникающие при преодолении неровностей рельефа поля, приводят к наименьшим угловым колебаниям орудия и, следовательно, к большему постоянству глубины обработки почвы [2]. Регулирование положения МЦВ достигается при помощи муфт, укорачивающих и удлиняющих тяги навесного механизма. Недостатками управляемой системы МЦВ являются то, что данный механизм требует достаточно точной регулировки для конкретного орудия и слабо влияет на изменение глубины обработки. Параметры и присоедительные размеры навесных механизмов закладываются при проектировании, и рассчитываются на усредненные условия эксплуатации навесных почвообрабатывающих орудий.
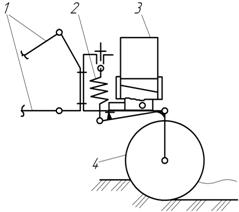
Второй способ заглубления дисковых рабочих органов основан на использовании утяжелителей в виде балластных ящиков, который рекомендуется производителями навесных дисковых почвообрабатывающих орудий (рис. 1б). Данный способ имеет ряд недостатков:
– существенное увеличение металлоемкости и массы ЛПА, что приводит к дополнительным динамическим нагрузкам и перерасходу топлива;
– использование балластных ящиков в эксплуатации неудобно, так как плотность и задернелость почвы значительно меняется, даже в пределах одного участка, что затрудняет возможность регулирования глубины обработки изменением массы балласта.
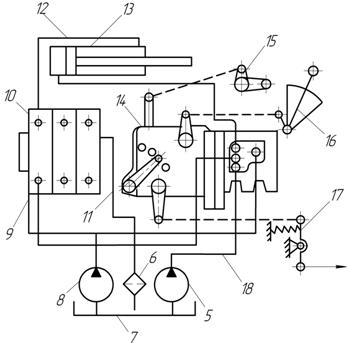
![]() Третий способ – позиционно-силовое регулирование глубины хода рабочих органов или система с универсальным регулятором навесного механизма (УРН). Применение силового и позиционного способов регулирования положения орудия относительно трактора позволяют автоматически регулировать глубину обработки почвы.
Третий способ – позиционно-силовое регулирование глубины хода рабочих органов или система с универсальным регулятором навесного механизма (УРН). Применение силового и позиционного способов регулирования положения орудия относительно трактора позволяют автоматически регулировать глубину обработки почвы.
Типовая схема навесной системы трактора с УРН приведена на рис. 1, в [3]. Реализация силового регулирования основывается на том, что тяговое сопротивление навесного механизма меняется с изменением глубины обработки. Изменение тягового сопротивления навески трактора передается через верхнюю тягу на пружину силового датчика 17. Деформация пружины датчика через систему рычагов передаются силовому регулятору 14, который управляет силовым цилиндром навесного механизма и поднимает или опускает его звенья 13, устанавливая заданную глубину обработки.
Силовое регулирование используют при неровном рельефе обрабатываемой поверхности, а позиционное на ровных территориях.
При позиционном регулировании глубины обработки почвы, система работает, как и при силовом, но сигнал на регулятор УРН передает тяга позиционного датчика 15, которая соединена шарниром с штоковым рычагом гидроцилиндра. Функционирование позиционного датчика основано на изменении положения рычага силового цилиндра. Изменение глубины обработки почвы вызывает изменение положения навески, следовательно, и рычага позиционного датчика. Позиционный датчик передает сигнал на УРН 14, который стабилизирует глубину обработки.
 а б
а б
1 – звенья навесного механизма трактора; 2 – пружина амортизатора; 3 – балластный ящик; 4 – диск; 5, 8 – насосы НШ-32, 6 – фильтр, 7 – гидробак; 9, 18 – напорные гидромагистрали; 10 – гидрораспределитель; 11 – сливная магистраль; 12 – трубопровод; 13 – силовой гидроцилиндр; 14 – универсальный регулятор навесной системы; 15 – позиционный датчик; 16 – рукоятка регулятора; 17 – силовой датчик
|
а – управления положением МЦВ; б – изменения массы балластных ящиков;
в – позиционно-силовым регулированием
Недостаток позиционно-силового регулирования заключается в сложности системы и ее достаточно высокой стоимости.
![]() Авторами предлагается использовать более перспективный способ повышения заглубляемости и стабильности хода дисковых рабочих органов на заданной глубине обработки почвы, достигаемый за счет использования принудительного вибрационного воздействия.
Авторами предлагается использовать более перспективный способ повышения заглубляемости и стабильности хода дисковых рабочих органов на заданной глубине обработки почвы, достигаемый за счет использования принудительного вибрационного воздействия.
Применению виброэффекта при резании и обработке почвы лесными почвообрабатывающими орудиями посвящены работы ряда исследователей. Так, проводились исследования по вибрированию черенкового ножа кустарниково-болотного плуга при вспашке почв на нераскорчеванных вырубках [4]. В работе предложено использовать активный черенковый рабочий орган при резании почв насыщенных корнями [4]. Учеными и были обоснованы конструкции вибрационных рабочих органов для подрезки и выкопки сеянцев и саженцев в лесных питомниках [5]. Однако данных по использованию эффекта вибрации для заглубления дисковых рабочих органов лесных почвообрабатывающих орудий выявлено не было.
Оригинальным техническим решением, в котором впервые применена принудительная вибрация дисковых рабочих органов, является заявка на патент ВГЛТА за № «Почвообрабатывающее орудие» (рис. 2), на которое получено положительное решение. Экспериментальные исследования этой конструкции на реальных лесных объектах показали ее эффективность, но выявили ряд недостатков. К ним относятся сложность конструкции, относительно низкие надежность и КПД вибрационного механизма (ВМ), вследствие использования в нем механической передачи для привода от вала отбора мощности агрегатируемого трактора.
а б
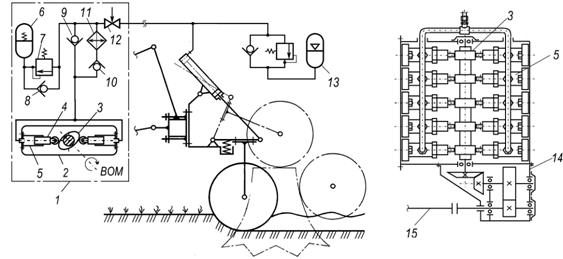
Рис. 2. Принципиальные схемы лесного дискового культиватора (а) и гидромеханического вибрационного механизма рабочих органов (б)
1 – вибрационный механизм; 2 – корпус; 3 – двухкулачковый вал; 4 – плунжер; 5 – секция плунжерного насоса; 6 – пружинно-гидравлический аккумулятор; 7 – предохранительный клапан; 8, 9, 10 – обратные клапаны; 11 – теплообменник; 12 – регулируемый вентиль;
13 – пневмогидравлический аккумулятор; 14 – редуктор; 15 – вал отбора мощности трактора
![]() Более эффективной и надежной в работе, а также простой по конструкции является предложенное авторами техническое решение по заявке на патент ВГЛТА № от 01.01.2001 г. (рис. 3). По данному изобретению предлагается избавиться от дополнительных утяжелителей, повысить качество обработки почвы за счет повышения заглубляющей способности и стабильности глубины обработки почвы, а также уменьшить расход топлива. Достигается это путем вибрационной и энергосберегающей систем.
Более эффективной и надежной в работе, а также простой по конструкции является предложенное авторами техническое решение по заявке на патент ВГЛТА № от 01.01.2001 г. (рис. 3). По данному изобретению предлагается избавиться от дополнительных утяжелителей, повысить качество обработки почвы за счет повышения заглубляющей способности и стабильности глубины обработки почвы, а также уменьшить расход топлива. Достигается это путем вибрационной и энергосберегающей систем.
В данном случае непроизводительно рассеиваемую энергию при движении массивного почвообрабатывающего агрегата на вырубках, предлагается рекуперировать, и использовать в рабочем процессе для привода вибрационного механизма навесного дискового почвообрабатывающего орудия. Аккумулирование энергии осуществляется от систем: рекуперации предохранителя почвообрабатывающего орудия 1, ходовой части 2 и навесного устройства трактора 3 (рис. 3). В качестве накопителя энергии служит пневмогидравлический аккумулятор (ПГА) 25. Работа всех трех механизмов рекуперации ЛПА основана на насосном эффекте, возникающем при возвратно-поступательном движении штоков гидроцилиндров и соответствующей работе обратных клапанов.
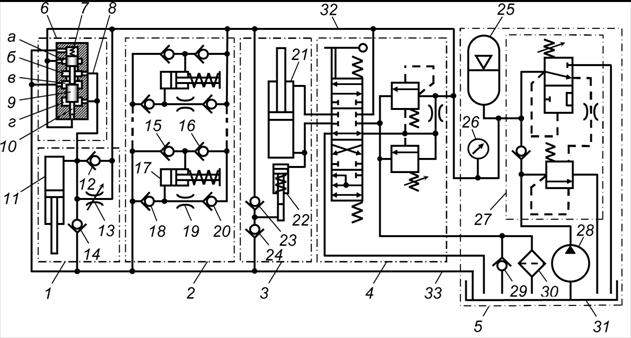
1…3 – системы рекуперации предохранителя почвообрабатывающего орудия, подвески и навесного механизма трактора, соответственно; 4 – гидрораспределитель трактора; 5 – насосно-аккумуляторный узел; 6 – гидропульсатор вибрационного механизма; 7 – пружина; 8 – отводящий трубопровод; 9 – золотник; 10 – плунжер; 11 – гидроцилиндр предохранителя и вибрационного механизма рабочих органов орудия; 12, 14, 15, 16, 18, 20, 23, 24, 29 – клапаны обратные; 13 – дроссель регулируемый; 17 – гидравлический амортизатор подвески трактора; 19 – дроссель нерегулируемый; 21 – гидроцилиндр навесного механизма; 22 – мультипликатор давления; 25 – пневмогидроаккумулятор; 26 – манометр; 27 – клапан разгрузочный автоматический; 28 – насос; 30 – фильтр; 31 – гидробак; 32 и 33 – напорная и сливная магистрали
Рис. 3. Схема гидропривода лесного почвообрабатывающего агрегата с механизмами
рекуперации энергии и вибрации рабочих органов дискового почвообрабатывающего орудия
![]()
Вибрационный механизм рабочих органов культиватора включает в себя гидропульсатор 6 и механизм рекуперации предохранителя 1 рабочих органов культиватора. Гидропульсатор обеспечивает вибрацию дисковых батарей с заданной частотой и амплитудой независимо, как от механизмов рекуперации 2 и 3, так и от насосно-аккумуляторного узла 5.
![]() Работа гидропульсатора 6 вибрационного механизма заключается в следующем. Рабочая жидкость от насосно-аккумуляторного узла 5 по напорной магистрали 32 подводится к проточке «а» и плунжеру 10 гидропульсатора. При этом в условный начальный момент времени отводящий трубопровод 8 гидропульсатора перекрыт золотником 9. Давлением жидкости плунжер 10 плавно начинает перемещать золотник 9 и сжимать пружину 7. При дальнейшем движении золотник 9 вначале с помощью проточки «в» отсоединяет трубопровод 8 от сливной магистрали 33, а затем соединяет его через проточки «а» и «б» с напорной магистралью 32. Одновременно жидкость подается в проточку «г», под торец золотника 9, площадь которого значительно больше торца плунжера 10, что обеспечивает ускоренное движение (релейное переключение) золотника. Следствием такого движения золотника является импульсный выброс рабочей жидкости через проточку «б» в отводящий трубопровод 8 и далее в гидроцилиндр 11. Так как давление рабочей жидкости в гидроцилиндре 11 снижается по мере движения его штока, соответственно уменьшается и давление в проточке «г» гидропульсатора. Благодаря этому, золотник под воздействием усилия сжатой пружины 7 возвращается в исходное положение и рабочий цикл гидропульсатора повторяется.
Работа гидропульсатора 6 вибрационного механизма заключается в следующем. Рабочая жидкость от насосно-аккумуляторного узла 5 по напорной магистрали 32 подводится к проточке «а» и плунжеру 10 гидропульсатора. При этом в условный начальный момент времени отводящий трубопровод 8 гидропульсатора перекрыт золотником 9. Давлением жидкости плунжер 10 плавно начинает перемещать золотник 9 и сжимать пружину 7. При дальнейшем движении золотник 9 вначале с помощью проточки «в» отсоединяет трубопровод 8 от сливной магистрали 33, а затем соединяет его через проточки «а» и «б» с напорной магистралью 32. Одновременно жидкость подается в проточку «г», под торец золотника 9, площадь которого значительно больше торца плунжера 10, что обеспечивает ускоренное движение (релейное переключение) золотника. Следствием такого движения золотника является импульсный выброс рабочей жидкости через проточку «б» в отводящий трубопровод 8 и далее в гидроцилиндр 11. Так как давление рабочей жидкости в гидроцилиндре 11 снижается по мере движения его штока, соответственно уменьшается и давление в проточке «г» гидропульсатора. Благодаря этому, золотник под воздействием усилия сжатой пружины 7 возвращается в исходное положение и рабочий цикл гидропульсатора повторяется.
Таким образом, при движении дискового рабочего органа в почве на заданной глубине обработки почвы, он вместе со стойкой совершает вынужденные колебания в упругой системе "рабочий орган – пружина – почва" под воздействием пульсаций рабочей жидкости в гидроцилиндре 11 предохранителя, передаваемой по трубопроводу 8 от гидропульсатора вибрационного механизма 6. При этом гидроцилиндр 11 в конструкции культиватора, в зависимости от цикла срабатывания, совмещает в себе функцию вибродвигателя и гидроцилиндра пневмогидравлического предохранителя.
Регулирование амплитуды колебаний рабочего органа, а следовательно, и глубины обработки в зависимости от удельного сопротивления обрабатываемой почвы и других факторов, осуществляется с помощью регулируемых обратного клапана 12 и дросселя 13 механизма рекуперации предохранителя 1.
Предлагаемая конструкция ЛПА обеспечивает рекуперацию энергии, повышение заглубляющей способности дисковых рабочих органов и их более устойчивый ход на заданной глубине обработки.
Компьютерное моделирование функционирования на вырубке лесного почвообрабатывающего агрегата с вибрационными рабочими органами (частотой 5…7 Гц и амплитудой 20…30 мм) и системой энергосбережения показали экономию топлива не менее чем на 20…25 %. Это подтверждает, что выбранное направление исследования перспективно и его целесообразно продолжить в направлении экспериментальной проверки результатов компьютерного моделирования и последующей апробации в реальных условиях нераскорчеванных вырубок.
Библиографический список
1. , , К вопросу столкновения лесохозяйственных машин с препятствиями на вырубках // Вестн. Центр.-Чернозем. регион. отделения наук о лесе РАЕН ВГЛТА : сб. науч. тр. / ВГЛТА. Воронеж, 1998. Вып. 1. С. 230–234.
2. Справочник конструктора сельскохозяйственных машин. В 4 т. Т. 1. / Под ред. . М.: Машиностроение, 19с.
3. Дьячков : учебное пособие / Волгоград : Волгоградский Ордена Красного Знамени политехнический институт, 19с.
4. Совков режимов работы и параметров активного рабочего органа черенкового типа для резания почв, насыщенных корнями: Дисс. канд. техн. наук. Новочеркасск, 19с. Библиогр. С. 147–160.
5. Главацкий параметров комбинированного орудия для вибрационной подрезки и выкопки сеянцев в лесных питомниках: автореф. дис. канд. техн. наук. Красноярск, 20с.
УДК 630.323.113
ПОВЫШЕНИЕ ИЗНОСОСТОЙКОСТИ ШАРНИРНЫХ СОЕДИНЕНИЙ ЛЕСНЫХ МАНИПУЛЯТОРОВ
, ,
ГОУ ВПО «Воронежская государственная лесотехническая академия»
Разработаны конструкции шарнирных соединений, в которых конструктивно исключается реверсивность трения. Представлена методика расчета фактических величин напряжений в тяжело нагруженных шарнирных соединениях с малой скоростью скольжения и неметаллическим антифрикционным материалом.
Ключевые слова: шарнирное соединение, реверсивность трения, расчет, напряжение, неметаллический антифрикционный материал.
![]() В лесной промышленности широко применяется манипуляторное технологическое оборудование, наименее износостойкими узлами которого являются шарнирные соединения.
В лесной промышленности широко применяется манипуляторное технологическое оборудование, наименее износостойкими узлами которого являются шарнирные соединения.
Анализ конструктивно-технологических характеристик и условий работы шарниров манипуляторов помог определить вид антифрикционного материала, способствующего повышению рабочего ресурса рассматриваемых узлов трения [1]. Однако, предложенные пластики не могут эффективно работать при реверсивном трении, кроме того, отрицательный эффект реверса примерно в два раза снижает износостойкость трущихся деталей. Это говорит о необходимости изменения конструкции шарнирных соединений с целью исключения реверсивности трения.
Что бы исключить влияние отрицательного эффекта реверса на износостойкость деталей шарнирных соединений лесопромышленных манипуляторов предлагается изменить конструкцию шарниров, как это показано на рис. 1.
Предложенное шарнирное соединение включает в себя охватывающую проушину 1, охватываемую проушину 2, две антифрикционные втулки 3 с внутренними и наружными рабочими поверхностями, четыре блока пружинных полуколец, составляющих пружинные шайбы 4 – два с правым и два с левым направлением образующей цилиндрической спирали, распорную втулку 5, втулку 6 с внутренней рабочей поверхностью и палец (вал) 7. Антифрикционные втулки 3 выполнены с возможностью поворота как относительно втулки 6, так и относительно пальца 7. Блоки, составляющие пружинные шайбы 4 включают в себя 2 (1…n) сектора кольца. Два блока 4 с разносторонним направлением образующей цилиндрической спирали крепятся к торцевым сторонам распорной втулки 5, установленной с натягом в втулке 6 и два блока 4 с разносторонним направлением образующей цилиндрической спирали крепятся к внутренним сторонам охватывающей проушины 1. На втулках 3 с торцевых сторон выполнены канавки, имеющие вид храповых зубьев, и по направлению ответны направлению свободных концов полуколец блоков составляющих пружинные шайбы 4 с возможностью их заклинивания.
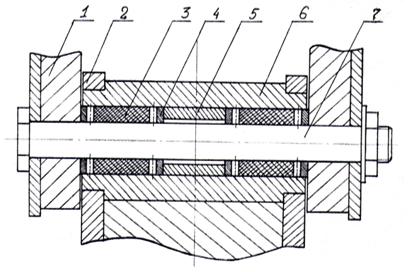
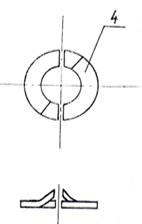
Рис. 1. Шарнирное соединение с двумя зонами трения.
![]() В предложенной конструкции шарнирного соединения реверсивное трение преобразуется в прерывистое вращательное посредством механизмов блокировки, состоящих из блоков составляющих пружинные шайбы 4, и канавок, выполненных в виде храповых зубьев на торцах втулок 3. Данная конструкция подтверждена патентом [2].
В предложенной конструкции шарнирного соединения реверсивное трение преобразуется в прерывистое вращательное посредством механизмов блокировки, состоящих из блоков составляющих пружинные шайбы 4, и канавок, выполненных в виде храповых зубьев на торцах втулок 3. Данная конструкция подтверждена патентом [2].
![]() Шарнирное соединение работает следующим образом. При повороте охватываемой проушины 2 относительно охватывающей проушины 1, блоки составляющих пружинные шайбы 4, закрепленные на распорной втулке 5 входят в зацепление с храповыми секторами на внутренних торцевых поверхностях антифрикционных втулок 3 и сообщают последним движение, в то время, как, блоки составляющих пружинные шайбы 4 на внутренних торцевых поверхностях охватывающей проушины 1 проскальзывают относительно канавок в виде храповых зубьев на внешних торцевых поверхностях антифрикционных втулок 3 из-за разного направления образующих цилиндрической спирали в блоках составляющих пружинные шайбы 4 и канавок. В этом случае трение происходит между внутренними поверхностями антифрикционных втулок 3 и наружной поверхностью пальца 7. При обратном ходе охватываемой проушины 2 относительно охватывающей проушины 1 блоки составляющих пружинные шайбы 4, закрепленные на торцевых поверхностях распорной втулки 5 выходят из зацепления с канавками в виде храповых зубьев на внутренних торцевых поверхностях антифрикционных втулок 3 и при дальнейшем движении проскальзывают друг относительно друга. Одновременно блоки составляющих пружинные шайбы 4, закрепленные на внутренних торцевых поверхностях охватывающей проушины 1 входят в зацепление с канавками на наружных торцевых поверхностях антифрикционных втулок 3 и сообщают им движение. В этом случае, процесс трения происходит между наружными поверхностями антифрикционных втулок 3 и внутренней поверхностью втулки 6.
Шарнирное соединение работает следующим образом. При повороте охватываемой проушины 2 относительно охватывающей проушины 1, блоки составляющих пружинные шайбы 4, закрепленные на распорной втулке 5 входят в зацепление с храповыми секторами на внутренних торцевых поверхностях антифрикционных втулок 3 и сообщают последним движение, в то время, как, блоки составляющих пружинные шайбы 4 на внутренних торцевых поверхностях охватывающей проушины 1 проскальзывают относительно канавок в виде храповых зубьев на внешних торцевых поверхностях антифрикционных втулок 3 из-за разного направления образующих цилиндрической спирали в блоках составляющих пружинные шайбы 4 и канавок. В этом случае трение происходит между внутренними поверхностями антифрикционных втулок 3 и наружной поверхностью пальца 7. При обратном ходе охватываемой проушины 2 относительно охватывающей проушины 1 блоки составляющих пружинные шайбы 4, закрепленные на торцевых поверхностях распорной втулки 5 выходят из зацепления с канавками в виде храповых зубьев на внутренних торцевых поверхностях антифрикционных втулок 3 и при дальнейшем движении проскальзывают друг относительно друга. Одновременно блоки составляющих пружинные шайбы 4, закрепленные на внутренних торцевых поверхностях охватывающей проушины 1 входят в зацепление с канавками на наружных торцевых поверхностях антифрикционных втулок 3 и сообщают им движение. В этом случае, процесс трения происходит между наружными поверхностями антифрикционных втулок 3 и внутренней поверхностью втулки 6.
Таким образом, за счет механизмов блокировки, реверсивное движение преобразуется в прерывистое вращательное поочередно по внутренним и наружным поверхностям антифрикционных втулок 3, что позволит повысить износостойкость деталей шарнирных соединений в 1,7…2,1 раза.
Данный вариант конструкции шарнирного соединения наиболее предпочтителен для средненагруженных (≈30 Мпа) узлов трения лесопромышленных манипуляторов. Однако, в лесной промышленности, особенно на лесозаготовительных работах (ЛП-19) используется манипуляторное технологическое оборудование, шарнирные соединения которых воспринимают более высокие нагрузки. В таких случаях наличие двойного зазора (рис. 1) может привести к повышенному износу деталей шарнирных соединений из–за действия динамических нагрузок.
Для манипуляторов, шарнирные соединения которых воспринимают нагрузки выше 30 МПа разработано шарнирное соединение с одним зазором, в котором реверсивное трение преобразуется в прерывистое вращательное (рис. 2), что подтверждено патентом [3].
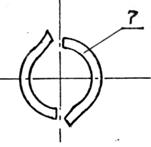
Рис. 2. Шарнирное соединение с одной зоной трения
Шарнирное соединение состоит из пальца (вала) 1, охватывающей проушины 2, охватываемой проушины 3, втулки охватываемой проушины 4, средней антифрикционной втулки 5, боковых антифрикционных втулок 6, блоков составляющих (1…n) пружинные кольца 7, канавок в виде храповых зубьев 8 и фиксирующих крышек 9.
![]() Принцип работы данного шарнирного соединения аналогичен первому случаю (рис. 1). К отличиям относятся: не две антифрикционные втулки, а три, - две антифрикционные втулки 6 установлены с натягом в щеках охватывающей проушины 2, а одна антифрикционная втулка 5 установлена с натягом во втулке 4 охватываемой проушины 3, канавки в виде храповых зубьев 8 выполнены на части внутренних поверхностей антифрикционных втулок 5 и 6, блоки составляющих пружинные кольца 7 закреплены на валу 1, и изогнуты не в осевом направлении, а в радиальном, для обеспечения возможности заклинивания с канавками 8. Для предотвращения, из-за сил трения, заклинивания вала 1 в щеках охватывающей проушины 2, его торцы выполнены конусными. Для фиксации вала 1 в шарнирном соединении предусмотрены крышки 9.
Принцип работы данного шарнирного соединения аналогичен первому случаю (рис. 1). К отличиям относятся: не две антифрикционные втулки, а три, - две антифрикционные втулки 6 установлены с натягом в щеках охватывающей проушины 2, а одна антифрикционная втулка 5 установлена с натягом во втулке 4 охватываемой проушины 3, канавки в виде храповых зубьев 8 выполнены на части внутренних поверхностей антифрикционных втулок 5 и 6, блоки составляющих пружинные кольца 7 закреплены на валу 1, и изогнуты не в осевом направлении, а в радиальном, для обеспечения возможности заклинивания с канавками 8. Для предотвращения, из-за сил трения, заклинивания вала 1 в щеках охватывающей проушины 2, его торцы выполнены конусными. Для фиксации вала 1 в шарнирном соединении предусмотрены крышки 9.
Посредством механизмов блокировки, реверсивное трение будет преобразовываться в прерывистое вращательное, только, в отличии от первого случая (рис. 1), вращательное движение буде сообщаться валу 1 и процесс трения будет происходить при движении охватываемой проушины 3 относительно охватывающей проушины 2 в одну сторону – между валом 1 и антифрикционной втулкой 5, а при движении охватываемой проушины 3 относительно охватывающей проушины 2 в другую сторону – между валом 1 и антифрикционными втулками 6.
Основополагающим фактором, обуславливающим рабочий ресурс шарнирных соединений, является величина радиального зазора. При достижении критической величины радиального зазора (0,9…0,13 мм) шарнирные соединения лесопромышленных манипуляторов выходят из строя. Для этих целей была разработана конструкция шарнирного соединения, в котором при одновременном преобразовании реверсивного трения в прерывистое вращательное происходит автоматическая компенсация износа. На данную конструкцию получен патент [4].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
