


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Білинський Володимир
Вінницький національний технічний університет
(науковий напрям: Електронна техніка та прилади)
РОЗРОБКА СУБПІКСЕЛНОГО МЕТОДУ ТА ОПТИКО-ЕЛЕКТРОННОГО ПРИСТРОЮ ВИМІРЮВАННЯ ГЕОМЕТРИЧНИХ ПАРАМЕТРІВ ОБ’ЄКТІВ
Ключові слова: субпікселне вимірювання, зміщення, фотоматриця, інтенсивність, пляма розсіювання
ВСТУП
Проблема вимірювання геометричних параметрів об’єктів (відстань, координати, форма) полягає у точному у визначенні центра лазерної плями відбитої від об'єкта, оскільки при отриманні зображень плям розсіювання на ПЗЗ-матрицях має місце неточність при визначенні її місцезнаходження за рахунок дискретизації. Таким чином, точне визначення положення об’єкта, а отже її просторової координати в межах одного піксела та розробка пристроїв, методів і алгоритмів, які дозволяють оцінювати положення центра світлової плями із субпікселної точністю, що є вищою, ніж роздільна здатність багатоелементного приймача, є актуальною задачею.
На сьогоднішній день особлива увага приділяється ефективності різних методів і математичних алгоритмів знаходження положення плями розсіювання, які вирішують задачу забезпечення надроздільної здатності. Позитив від методів, що досягають субпікселної точності, може розглядатися в двох аспектах: як засіб одержання вищої точності або як засіб, що одержує таку ж точність за меншу кількість кроків обчислення.
Роль оптичних методів контролю різко зросла з появою персональних комп'ютерів і малогабаритних комп'ютерних телекамер. Вони дозволили повністю автоматизувати всі необхідні розрахунки, виключивши при цьому підготовчі операції. Застосування комп'ютерів і телекамер дало можливість за допомогою того самого приладу вимірювати різні характеристики об’єктів, в тому числі геометричні розміри. При цьому виникає необхідність визначення поточних координат об’єкта на основі аналізу інтенсивності світла із похибкою, істотно меншої розмірів елементарного фрагмента зображення – піксела [1].
Метою роботи є розробка ефективного методу знаходження максимуму інтенсивності лазерної плями та розробка на його основі оптико-електронного пристрою вимірювання геометричних параметрів об’єктів.
Для розв’язання поставлених задач використані чисельні методи, методи обробки зображень, теорії алгоритмів, сучасні схемотехнічні підходи.
ОСНОВНА ЧАСТИНА
На основі аналізу літературних джерел виявлено такі алгоритми знаходження максимуму яскравості світлової плями: інтерполяційні методи, метод центра мас, апроксимація Гаусса, параболічна оцінка, дихтометрія, методи золотого перерізу та Фібоначі [2-4].
Наведені вище методи не є оптимальними при проектуванні оптико-електронних систем з урахуванням мінімальних затрат часу на обчислення та використовують не більше 3-5 ітераційних кроків, але після чого вимагають проведення уточнення результатів обчислення.
При розробці методу визначення максимуму інтенсивності світлової плями або лінії із субпікселною точністю були використані дві відомі моделі функції розсіювання світлової плями розмірами від декількох пікселів до сотень пікселів, які мають вигляд функції Гаусса або дифракційно-обмеженої плями розсіювання на рис. 1.


а) б)
Рис. 1. Моделі плям розсіювання: а) вигляд функції Гаусса; б) вигляд дифракційно-обмеженої плями розсіювання
На рис. 2 наведена пляма розсіювання, яка використовувалася для дослідження запропонованого методу та пляма розсіювання при накладенні адитивного шуму.


а) б)
Рис. 2. Пляма розсіювання:
а) без шуму; б) зашумлена
Особливістю таких плям розсіювання є наявність декількох типів піків: пік з тупою вершиною; симетричний і несиметричний пік. Справжній максимум х+δ знаходиться в районі даних пікселів, де δ – зміщення енергетичного центра відносно піксела з максимальною яскравістю, якому відповідає координата x [5].
В роботі запропоновано метод визначення максимуму інтенсивності світлової плями шляхом використання субпікселного зсуву багатоелементного фотоприймального пристрою та розрахунку положення максимуму на основі метода Гаусса та параболічного методу [6].
Алгоритм використовує три найбільших яскравих суміжних піксела, що знаходяться навколо досліджуваного максимуму й допускає, що форма досліджуваного максимуму відповідає профілю Гаусса. Це допущення є наближено правильним, оскільки, справжнє розподілення, звісно, не є гауссівським, тому що кожен піксел інтегрує світло, що падає на його поверхню. Коефіцієнти субпікселного зсуву α та β відносно центра піксела з максимальною яскравістю до та після зсуву багатоелементного фотоприймального пристрою визначаються на основі формули Гаусса (1):![]()
 ; (1)
; (1)
Відповідно дані коефіцієнти згідно іншої методики на основі параболічної оцінки можна визначити за допомогою формули (2):
 ; (2)
; (2)
Зміщення δ відносно піксела з максимальною яскравістю визначається для одновимірного випадку за допомогою формули (3):
 . (3)
. (3)
де D – значення субпікселного зсуву.
Метод досліджувався експериментально, засобами напівнатурного моделювання (Рис. 3)
а) б)
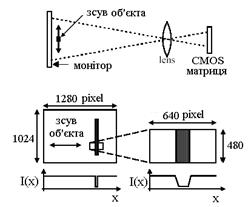
Рис. 3. Схема експериментальної установки
а) оптична схема; б) досліджувана пляма та інтерфейс програми зсуву
Зображення світлової плями з екрана монітора записувалося на цифрову відеокамеру, після чого виконувався зсув зображення на один піксел монітора. Масив даних уводився в комп’ютер, де формувався профіль лазерної плями або лінії. Відстань між монітором та відеокамерою була відома, що дозволило розрахувати відношення розмірів піксела монітора та відеокамери й, таким чином, визначити величину субпікселного зсуву D. У даному випадку мінімальний зсув зображення на моніторі в один піксел відповідало 0,4 піксела відеокамери.
В результаті проведеного експерименту отримані значення яскравості пікселів, що відповідають пікам світлової плями, а також прилеглих до нього. Отримані дані дозволили розрахувати відхилення максимального значення інтенсивності плями від центра пікселів для декількох кроків зсуву запропонованим методом, методом Гаусса та параболічним методом (Рис. 2.6), а також побудувати характеристики залежності номера піксела відеокамери N від номера піксела монітора M (Рис. 3).
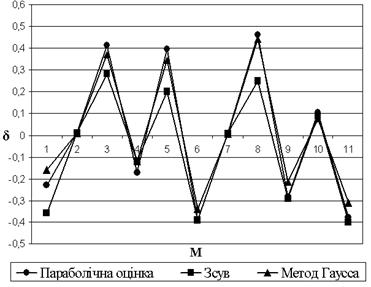
Рис. 4. Відхилення максимуму інтенсивності плями від центра пікселів
Характеристика на основі методу зсуву має більш лінійний характер у порівнянні з методом Гаусса, що підтверджує ефективність запропонованого методу (Рис.5).
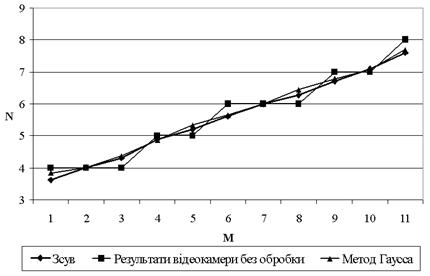
Рис. 5. Залежність піксела відеокамери від піксела монітора
Експериментальні дослідження дали змогу розрахувати відносну похибку визначення максимального значення інтенсивності світлової плями для методу зсуву, яка становить менше 20% ширини піксела (Рис. 6).
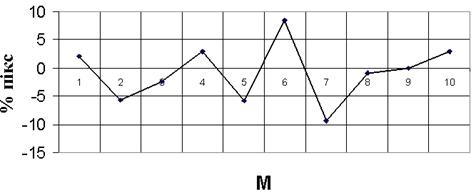
Рис. 6. Відносна похибка визначення максимуму інтенсивності плями
На основі розробленого методу зсуву, що дозволяє визначати максимум інтенсивності світлової плями або лінії з субпікселною точністю, запропонований оптико-електронний пристрій вимірювання геометричних параметрів об'єктів на основі тріангуляційного методу [7,8] (Рис. 7). Даний пристрій містить послідовно розташовані та оптично з’єднані лазер 1, оптичну систему 2, яка складається з напівпрозорого дзеркала 3, дзеркала 4 та набору циліндричних лінз 5 та 6, які орієнтовані взаємно перпендикулярно, фотоматрицю 8, мікроконтролер 9, вхід якого зв’язаний з виходом фотоматриці 8 [9]. Окремо оптична система містить пристрій вимірювання кута нахилу. Кількість ліній на виході передавача може бути різної, від однієї до восьми [10].
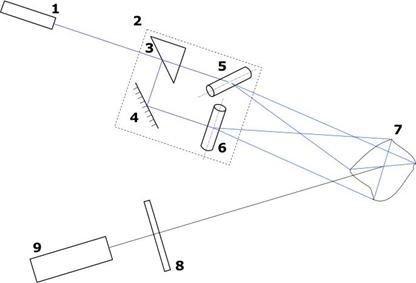
Рис. 7. Структурна оптична схема оптико-електронного пристрою пристрій вимірювання геометричних параметрів об'єктів
В основу роботи пристрою покладено вимірювання відстані до перешкоди та отримання інформації про характер перешкоди (форма, розмір і т. ін.). При цьому відстань вимірюється до точок перетину лазерних ліній тріангуляційним методом. А форма об’єкта визначається шляхом порівняння кривини лазерних ліній, що сформувалися на перешкоді та реєструвалися телекамерою, з набором готових форм (шаблонів), що знаходяться у пам’яті обчислювального пристрою. Результати вимірювання та визначені форми перешкоди (наприклад, відкриті або закриті двері, бордюри або сходинки, дорожні знаки та світлофори) трансформуються в набір звукових повідомлень, що можуть бути використані людьми з обмеженими можливостями.
На Рис. 8 наведена еталонна форма зображення лазерних ліній, що проектуються на об’єкт, на Рис. 9 наведені форми деяких зображень відбитих від об’єктів і зареєстрованих відеокамерою ліній, що зазнали зміни та підлягають розпізнаванню.
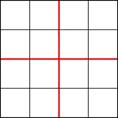
Рис. 8. Еталонна лінія
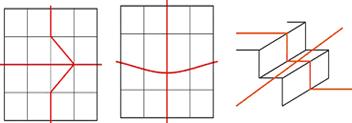
Рис. 9. Формування відбитих ліній
Головними елементами електричної схеми пристрою, що розроблявся є мікроконтролер керування, який обробляє інформацію, мікросхеми-фотоприймачі (фотоматриці), за допомогою яких реєструється зображення ліній, пам’ять для тимчасового зберігання результатів вимірювань, інтерфейс USB для зв’язку з персональним комп’ютером або голосовим пристроєм (Рис. 10). Обчислювальний пристрій (мікроконтролер) порівнює форми лазерних ліній із базою готових форм, що зберігаються в пам’яті обчислювального пристрою, аналізує ступінь збігу та видає голосове попередження.
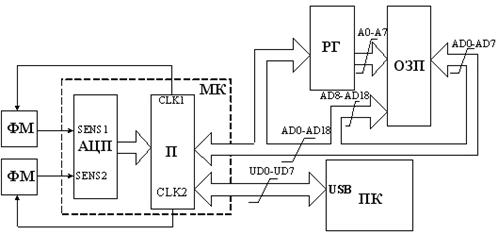
Рис. 10. Структурна електрична схема оптико-електронного пристрою пристрій вимірювання геометричних параметрів об'єктів
В результаті розробки електричної та оптичної схеми проведено макетування оптико-електронної системи, яка використовує дві взаємно перпендикулярні лінії. Оптична схема, розміщена на основі, що має декілька степенів свободи й представляє собою будівельний рівень. Оптична схема складається з набору лінз для формування лазерних ліній, інтерференційного фільтра для зменшення впливу завад та цифрової відеокамери (Рис. 11).
Відеокамера під'єднана до комп'ютера за допомогою стандартного інтерфейсу USB. Відеосенсор забезпечує роздільну здатність 360 тис. пікселів, формат зображення від 160×120 до 640×480 точок на дюйм.
Рис. 11. Макет оптико-електронного пристрою вимірювання геометричних параметрів об'єктів
Для підтримки функціонування вимірювальної системи необхідний персональний комп'ютер типу Pentium з мінімальною конфігурацією: частотою роботи 1 GHz, ОЗП 128 МВ, монітором, що підтримує 16–бітний режим і операційною системою Windows 2000.
Основні технічні характеристики даної системи: діапазон – 0,4 м – 6 м; абсолютна похибка 0,005 м; маса 1,2 кг; джерело живлення – 3 В; інтерфейс – USB.
ВИСНОВКИ
У конкурсній роботі розроблявся метод субпікселного визначення максимуму інтенсивності центра світлової плями та оптико-електронний пристрій вимірювання геометричних параметрів об’єктів.
Для підвищення роздільної здатності оптико-електронног пристрою запропонований метод на основі використання зсуву багатоелементного фотоприймального пристрою та розроблений алгоритм, що дозволяє оцінювати положення максимуму світлової плями або лазерної лінії з субпікселною точністю, а також проведений напівнатурний експеримент, що підтверджує ефективність запропонованого методу. У результаті визначена відносна похибка методу, яка складає менше 20% ширини піксела.
Описаний розроблений оптико-електронний пристрій вимірювання геометричних параметрів об’єктів тріангуляційного типу, дозволяє визначати відстань, координати та форму об’єктів. Приведена структурна оптична та електрична схема пристрою, а також здійснене макетування розробленого пристрою, що підтверджує практичність розробки.
Перевагам оптико-електронного пристрою є висока точність, портативність, надійність виявлення об'єкта при різних завадах, скритність розміщення, зручність експлуатації. Система здатна не тільки визначати предмети, але і колір, наприклад, вона може сигналізувати про зміну кольору світлофора.
Пристрій, що розроблявся може бути призначений для підвищення безпеки людей з особливими потребами при самостійному пересуванні в незнайомій місцевості, зокрема, по вулицях міста і дозволяє виявляти перешкоди як нижнього, так і верхнього рівня, що є особливо важливо. Крім цього даний пристрій можна застосовувати в геодезії, будівництві, військовій справі, а також для визначення анатомічних форм тіла людини, зокрема, при дослідженні сколіозу у дітей чи стопи людини.
Література
1. Р. Гонсалес, Р. Вудс. Цифровая обработка изображений, М.: Техносфера, 2005. – 1072 с.
2. І. Вплив розмиття різкого краю на похибку дискретизації зображень в оптико-цифровій системі // Комп’ютерні технології друкарства. – 2000. – №4. – С. 373–377.
3. , Вон Дон Чжу, Ми Сук Чжун. Оптика негомоцентрических световых пучков// Оптический журнал. – 1997. –Т. 64, № 8. – С. 28-31.
4. Fisher R. B., Naidu D. K. A Comparison of Algorithms for Subpixel Peak Detection // Advances in Image Processing, Multimedia and Machine Vision. – Heidelberg: Springer-Verlag. – 1996. – P. 205 – 229.
5. Форсайт, Девид А, Понс, Жан. Компьютерное зрение. Современный подход.: Пер. с англ. – М.: Издательський дом «Вильямс», 2004. – 928 с.
6. Методы компьютерной обработки изображений / Под ред. . – 2-е изд., испр. – М: Физматлит, 2003. – 784 с.
7. Фукс-, Епифанов -электронные приборы. - Л.: Машиностроение, 19с.
8. Федоров и их применение. - М.: ДОСААФ, 1973.
9. Патент на корисну модель, кл. А61F 9/08 № 000 U від 15.12.2006. Бюл. №12 Пристрій для визначення перешкод людьми з обмеженим зором/ Білинський Й. Й., Білинський В. Й.,
10. Введение в лазерную технику. , К.: Техника, 1977. – 240 с.
