
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МЕХАНИКА.
ВВЕДЕНИЕ.
Основная задача механики состоит в том, чтобы по известному начальному состоянию тела уметь найти его состояние в любой момент времени. Знать состояние движения тела – это значит в данный момент времени знать его координаты ![]() и скорость
и скорость ![]() .
.
Для решения такой задачи в самом общем виде надо воспользоваться уравнением движения
 .
.
Эту задачу можно решить, если, кроме начального состояния движения тела, знать вид и значение сил, действующих на тело, и его массу. Силы учитывают внешние условия, в которых происходит движение тела. Масса же, как мера инертности, полностью определяет свойства самого тела.
Итак, для решения задачи, нам необходимо знать вид внешних сил тяготения, трения, упругости...
Для первой из них существует достаточно простой закон – она прямо пропорциональна произведению масс взаимодействующих тел и обратно пропорциональна квадрату расстояния между телами:
Этот закон справедлив во всех случаях независимо от вещества тела и условий, в которых они находятся; из него вытекает большое число следствий; он является фундаментальным.
Выражение же для сил трения ![]() и упругости
и упругости ![]() , на первый взгляд, тоже довольно простое:
, на первый взгляд, тоже довольно простое: ![]() и
и ![]() , где
, где ![]() и
и ![]() - соответственно, коэффициент трения и коэффициент упругости,
- соответственно, коэффициент трения и коэффициент упругости, ![]() - линейная деформация упругого тела. Однако эта простота только кажущаяся. Во-первых, в формулы входят коэффициенты, определяемые из опыта и зависящие от вещества, качества поверхности и т. п. Во-вторых, эти формулы применимы далеко не всегда: например, выражение для силы трения имеет такой вид только при малых скоростях, а для сил упругости – при малых деформациях
- линейная деформация упругого тела. Однако эта простота только кажущаяся. Во-первых, в формулы входят коэффициенты, определяемые из опыта и зависящие от вещества, качества поверхности и т. п. Во-вторых, эти формулы применимы далеко не всегда: например, выражение для силы трения имеет такой вид только при малых скоростях, а для сил упругости – при малых деформациях ![]() . При увеличении скорости и смещения выражения усложняются. Все это показывает, что эти законы не являются фундаментальными. Дело в том, что силы трения и упругости выступают как усреднение огромного числа элементарных взаимодействий между молекулами. То, что это взаимодействие имеет не гравитационную природу, следует из простого факта, что тела сопротивляются не только растяжению, но и сжатию, т. е. между частицами тела возникает сила отталкивания. Гравитационные же силы могут вызвать только притяжение. Силы трения и упругости являются проявлением нового типа взаимодействия – электромагнитного.
. При увеличении скорости и смещения выражения усложняются. Все это показывает, что эти законы не являются фундаментальными. Дело в том, что силы трения и упругости выступают как усреднение огромного числа элементарных взаимодействий между молекулами. То, что это взаимодействие имеет не гравитационную природу, следует из простого факта, что тела сопротивляются не только растяжению, но и сжатию, т. е. между частицами тела возникает сила отталкивания. Гравитационные же силы могут вызвать только притяжение. Силы трения и упругости являются проявлением нового типа взаимодействия – электромагнитного.
План оформления решения задачи.
Студентам предлагается решение каждой задачи оформлять в соответствии со следующим планом:
1. Анализ текста задачи и краткая запись условия задачи.
2. Выполнение схематического рисунка, если это требуется, на основе проведенного анализа условия задачи.
3. Запись законов и соотношений, положенных в основу решения задачи.
4. Запись дополнительных соотношений для определения величин, входящих в уравнение основных законов, но не данных в условии задачи.
5. Вывод расчетной формулы, выражающей искомую величину через величины, данные в условии задачи.
6. Определение наименования единицы величины, которую дает расчетная формула (пользоваться обозначениями единиц СИ).
7. Подстановка числовых значений величин, данных в условии задачи, в расчетную формулу и вычисление искомой величины.
Прежде чем приступить к выполнению контрольного домашнего задания (варианты заданий даны в п. 3), студент должен изучить теоретический материал, ознакомиться с методическими указаниями, разобрать приведенные примеры решения задач.
1. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ТЕМАМ
И ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
1.1. Физические основы механики.
1.Кинематика и динамика поступательного движения.
Движение материальной точки характеризуется перемещением, длиной пути, скоростью и ускорением.
Перемещение ![]() - вектор, проведенный из начальной точки в конечную точку данного участка траектории и равный приращению радиус-вектора.
- вектор, проведенный из начальной точки в конечную точку данного участка траектории и равный приращению радиус-вектора.
Путь ![]() - скалярная величина, равная сумме длин всех участков траектории, пройденных точкой за данный промежуток времени.
- скалярная величина, равная сумме длин всех участков траектории, пройденных точкой за данный промежуток времени.
Скорость ![]() - векторная величина, характеризующая быстроту изменения радиус-вектора и равная производной радиус-вектора
- векторная величина, характеризующая быстроту изменения радиус-вектора и равная производной радиус-вектора ![]() по времени
по времени ![]() :
:
![]() .
.
В проекциях на координатные оси:
 .
.
Так как ![]() , то модуль скорости равен производной пути по времени:
, то модуль скорости равен производной пути по времени:
![]() .
.
Ускорение ![]() - векторная величина, характеризующая быстроту изменения вектора скорости и равная производной вектора скорости
- векторная величина, характеризующая быстроту изменения вектора скорости и равная производной вектора скорости ![]() по времени
по времени ![]() :
:
![]() .
.
Если тело (материальная точка) движется по криволинейной траектории, то вектор ускорения ![]() удобно разложить на составляющие - вдоль касательной к траектории (тангенциальное ускорение
удобно разложить на составляющие - вдоль касательной к траектории (тангенциальное ускорение ![]() ) и перпендикулярно касательной, т. е. вдоль нормали к траектории (нормальное, или центростремительное ускорение
) и перпендикулярно касательной, т. е. вдоль нормали к траектории (нормальное, или центростремительное ускорение ![]() ):
):
 .
.
Тангенциальное ускорение ![]() определяет быстроту изменения модуля скорости и численно равно
определяет быстроту изменения модуля скорости и численно равно
 .
.
Нормальное ускорение ![]() определяет быстроту изменения направления вектора скорости по модулю:
определяет быстроту изменения направления вектора скорости по модулю:
 или
или ![]() ,
,
где ![]() - угловая скорость материальной точки; v - ее линейная скорость; R - радиус кривизны траектории.
- угловая скорость материальной точки; v - ее линейная скорость; R - радиус кривизны траектории.
Движение с постоянным тангенциальным ускорением (![]() = const) называется равнопеременным; равноускоренным, если
= const) называется равнопеременным; равноускоренным, если ![]() > 0; равнозамедленным, если
> 0; равнозамедленным, если ![]() < 0.
< 0.
Если известны координаты ![]() начального положения материальной точки, ее начальная скорость
начального положения материальной точки, ее начальная скорость ![]() и зависимость ее ускорения от времени
и зависимость ее ускорения от времени ![]() , то можно найти координаты x, y этой материальной точки и ее скорость
, то можно найти координаты x, y этой материальной точки и ее скорость ![]() в произвольный момент времени (прямая основная задача кинематики).
в произвольный момент времени (прямая основная задача кинематики).
В случае движения с постоянным ускорением (![]() = const) пользуются следующими уравнениями:
= const) пользуются следующими уравнениями:
 (1)
(1)
где ![]() - проекции вектора
- проекции вектора ![]() соответственно на оси ОХ и ОУ;
соответственно на оси ОХ и ОУ;
![]() - проекции вектора
- проекции вектора ![]() соответственно на оси ОХ и ОУ;
соответственно на оси ОХ и ОУ;
![]() - проекции вектора
- проекции вектора ![]() соответственно на оси ОХ и ОУ.
соответственно на оси ОХ и ОУ.
При прямолинейном равнопеременном движении, происходящем в одном направлении (без точек возврата), целесообразно координатную ось направлять по направлению движения. В этом случае ![]() поэтому уравнения (1) можно заменить уравнениями
поэтому уравнения (1) можно заменить уравнениями
 (2)
(2)
 (3)
(3)
 (4)
(4)
Ускорение ![]() , приобретаемое телом массой m под действием силы
, приобретаемое телом массой m под действием силы ![]() , определяется законом динамики поступательного движения (2-й закон Ньютона):
, определяется законом динамики поступательного движения (2-й закон Ньютона):
![]() . (5)
. (5)
Если на тело действует не одна сила, а несколько, то ускорение будет определяться их равнодействующей:
 . (6)
. (6)
Уравнение динамики поступательного движения (5) в проекции на нормаль к траектории в данной точке запишется в виде
 ,
,
где ![]() - проекция на нормаль силы
- проекция на нормаль силы ![]() , действующей на тело.
, действующей на тело.
Закон динамики (5) можно записать в более общем виде, используя понятие импульса тела ![]() . Элементарное изменение
. Элементарное изменение ![]() импульса тела равно элементарному импульсу силы
импульса тела равно элементарному импульсу силы ![]() , действующей на него, и совпадает с ним по направлению:
, действующей на него, и совпадает с ним по направлению:
 ,
,
где ![]() - промежуток времени, в течение которого действует сила
- промежуток времени, в течение которого действует сила ![]() . Если внешние силы на систему тел не действуют (система изолирована) или их равнодействующая равна нулю, то суммарный импульс замкнутой системы с течением времени не изменяется:
. Если внешние силы на систему тел не действуют (система изолирована) или их равнодействующая равна нулю, то суммарный импульс замкнутой системы с течением времени не изменяется:
 .
.
Это выражение называется законом сохранения импульса. Если в неизолированной системе тел проекция равнодействующей внешних сил на какую-либо ось (например, ОХ) равна нулю, то проекция количества движения (импульса) системы на эту же ось (ОХ) есть величина постоянная:
 , (7)
, (7)
где ![]() и
и  - сумма проекций количеств движения (импульсов) тел системы на ось ОХ соответственно в начальный и конечный моменты времени.
- сумма проекций количеств движения (импульсов) тел системы на ось ОХ соответственно в начальный и конечный моменты времени.
Силы, действующие на тело, могут иметь разную физическую природу. Так, в результате гравитационного взаимодействия тела и Земли возникает сила тяжести:
 ,
,
где ![]() - ускорение свободного падения.
- ускорение свободного падения.
При малых деформациях твердого тела (стержня, троса, пружины) в нем возникает сила упругости. Величина этой силы пропорциональна величине деформации х (растяжения или сжатия):
 ,
,
где ![]() - коэффициент упругости (для пружины - жесткость). Отношение силы F к площади поперечного сечения стержня S называется напряжением:
- коэффициент упругости (для пружины - жесткость). Отношение силы F к площади поперечного сечения стержня S называется напряжением:
![]() .
.
Одним из видов взаимодействия соприкасающихся тел является трение. Оно проявляется в сопротивлении относительному перемещению этих тел вдоль поверхности соприкосновения. Сила трения скольжения вычисляется по формуле
 , (8)
, (8)
где ![]() - коэффициент трения между поверхностями данных тел; N - сила нормального давления одного тела на другое. Сила трения направлена вдоль поверхности соприкосновения в сторону, противоположную скорости перемещения. Если приложенная к телу сила недостаточно велика, чтобы вызвать его скольжение, то возникающая при этом сила сопротивления называется силой трения покоя. Она принимает такое численное значение, чтобы уравновесить другие силы, действующие на тело, в пределах от 0 до максимально возможного значения, равного произведению
- коэффициент трения между поверхностями данных тел; N - сила нормального давления одного тела на другое. Сила трения направлена вдоль поверхности соприкосновения в сторону, противоположную скорости перемещения. Если приложенная к телу сила недостаточно велика, чтобы вызвать его скольжение, то возникающая при этом сила сопротивления называется силой трения покоя. Она принимает такое численное значение, чтобы уравновесить другие силы, действующие на тело, в пределах от 0 до максимально возможного значения, равного произведению ![]() , при котором начинается скольжение.
, при котором начинается скольжение.
Следует помнить, что законы Ньютона справедливы только в инерциальных системах отсчета. В дальнейшем будут рассматриваться задачи, при решении которых можно пренебречь как орбитальным движением Земли, так и ее суточным вращением. В этом случае систему отсчета, связанную с Землей, можно считать инерциальной.
При решении задач динамики поступательного движения необходимо учитывать следующие рекомендации:
- сделать схематический чертеж, на котором показать расположение взаимодействующих тел (до и после взаимодействия); показать на нем для каждого тела векторы скорости, ускорения и всех сил, действующих на него;
- выбрать систему отсчета, связанную с Землей; при этом целесообразно одну из координатных осей направлять вдоль направления вектора ускорения или скорости (если векторы ускорений отдельных тел имеют разное направление, то можно ввести для каждого тела свою систему координат с учетом направления ускорения каждого тела);
- применяя уравнение 2-го закона Ньютона, записать его для каждого тела сначала в векторной форме, а затем - в проекциях на выбранные координатные оси, при этом следует учитывать знаки проекций;
- используя уравнение (7), необходимо:
а) установить, какие внешние силы в данной задаче учитываются и какими можно пренебречь по сравнению с внутренними силами;
б) определить, на какую координатную ось проекция равнодействующей внешних сил равна нулю, и записать уравнение (7) в проекциях на эту ось, не забывая о знаках проекций скоростей.
Примеры решения задач
Задача 1. На горизонтальной плоскости лежит брусок, масса которого ![]() = 2,0 кг. К концу шнура, прикрепленного к бруску и перекинутого через неподвижный блок (рис.1), подвешен груз массой
= 2,0 кг. К концу шнура, прикрепленного к бруску и перекинутого через неподвижный блок (рис.1), подвешен груз массой ![]() = 0,85 кг. Определить силу натяжения шнура и коэффициент трения между бруском и поверхностью, если за 3,0 с после начала движения груз прошел равноускоренно расстояние 81 см. Трением в блоке и массой блока пренебречь.
= 0,85 кг. Определить силу натяжения шнура и коэффициент трения между бруском и поверхностью, если за 3,0 с после начала движения груз прошел равноускоренно расстояние 81 см. Трением в блоке и массой блока пренебречь.
Решение
![]() = 2,0 кг
= 2,0 кг
![]() = 0,85 кг
= 0,85 кг
 = 3,0 с
= 3,0 с
![]() = 81 см= 0,81 м
= 81 см= 0,81 м
![]() =0
=0


![]()
Покажем на чертеже (см. рис.1) ускорения, с которыми будут двигаться тела, и силы, которые действуют на каждое тело.
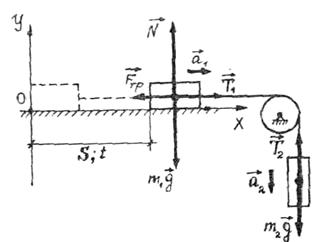
Рис.1
На брусок действует сила тяжести ![]() , сила трения
, сила трения ![]() , сила нормальной реакции опоры
, сила нормальной реакции опоры ![]() и сила реакции шнура
и сила реакции шнура ![]() .
.
На груз действуют сила тяжести ![]() и сила реакции шнура
и сила реакции шнура ![]() .
.
Возьмем систему отсчета, связанную с Землей, и направим ось ОХ вдоль вектора ![]() (т. е. горизонтально).
(т. е. горизонтально).
Запишем уравнения 2-го закона Ньютона в векторной форме для каждого тела:
-для бруска
 ; (9)
; (9)
- для груза
 . (10)
. (10)
Спроектируем уравнения (9) и (10) уравнениями, записанными в проекциях на оси ОХ и ОУ, учитывая при этом, что ![]() (шнур считается нерастяжимым) и
(шнур считается нерастяжимым) и  (массой шнура, массой блока и трением в блоке пренебрегаем).
(массой шнура, массой блока и трением в блоке пренебрегаем).
 ; (11)
; (11)
 , или
, или  ; (12)
; (12)
 . (13)
. (13)
Силу трения определим по формуле (8):
 .
.
Ускорение найдем из соотношения (3), учитывая, что ![]() :
:
![]() . (14)
. (14)
Из соотношений (11)...(13), (8) и (14) получим
 . (15)
. (15)
Из уравнения (15) находим расчетную формулу для коэффициента трения:
 . (16)
. (16)
Далее из соотношений (11), (12), (13), (8) получаем
 . (17)
. (17)
Сила натяжения шнура ![]() согласно 3-му закону Ньютона равна силе реакции шнура
согласно 3-му закону Ньютона равна силе реакции шнура ![]() , которая из уравнения (17) определяется по формуле
, которая из уравнения (17) определяется по формуле
 . (18)
. (18)
Теперь определим наименования единиц величин, которые дают расчетные формулы (16) и (18):
 (
(![]() - безразмерный коэффициент);
- безразмерный коэффициент);
Подставив данные задачи, выраженные в единицах СИ, в формулу (16), вычислим коэффициент трения:
 .
.
Подставляя в формулу (18) данные задачи и значения коэффициента трения ![]() = 0,4, определим силу натяжения шнура:
= 0,4, определим силу натяжения шнура:

Задача 2. На платформу с песком массой 1 т, движущуюся горизонтально со скоростью 7,2 км/ч, попадает холостой снаряд массой 10 кг, летящий со скоростью 600 м/с навстречу платформе под углом 60° к горизонту. Скорости снаряда и платформы лежат в одной плоскости. Определить, с какой скоростью будет двигаться платформа после того, как снаряд застрянет в песке (рис.2).
Решение
![]() = 1 т = 1000 кг
= 1 т = 1000 кг
![]() = 10 кг
= 10 кг
![]() = 7,2 км/ч = 2 м/с
= 7,2 км/ч = 2 м/с
![]() = 600 м/с
= 600 м/с

![]()
![]() -?
-?
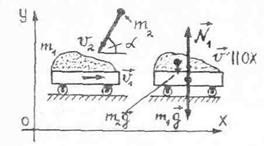
Рис.2
Выберем систему отсчета, связанную с Землей, направив ось ОХ горизонтально (см. рис.2). На систему тел платформа-снаряд действуют следующие внешние силы: со стороны Земли - силы тяжести ![]() и
и ![]() , направленные вертикально вниз, и со стороны дороги – сила нормальной реакции
, направленные вертикально вниз, и со стороны дороги – сила нормальной реакции ![]() , направленная вертикально вверх (трение будем считать малым по сравнению с внутренними силами).
, направленная вертикально вверх (трение будем считать малым по сравнению с внутренними силами).
Очевидно, что проекция каждой внешней силы ![]() ,
, ![]() и
и ![]() на ось ОХ равна нулю, поэтому выполняется условие
на ось ОХ равна нулю, поэтому выполняется условие
 .
.
Следовательно, для системы платформа-снаряд можно применить уравнение (7):
 .
.
Учтем, что по условию задачи после взаимодействия платформа и снаряд движутся как одно тело (массой ![]() ) со скоростью
) со скоростью ![]() , о которой известно лишь, что она направлена параллельно оси ОХ.
, о которой известно лишь, что она направлена параллельно оси ОХ.
Из рис.2 видно, что проекции скоростей платформы и снаряда на ось ОХ до взаимодействия равны
![]() .
.
Тогда уравнение (7) принимает следующий вид:
![]() . (19)
. (19)
Из уравнения (19) находим, что
![]() . (20)
. (20)
Определим наименования единицы величины, которую дает расчетная формула (20):
![]() .
.
Подставим исходные данные задачи в формулу (20):
![]() .
.
Отрицательное значение проекции ![]() означает, что вектор скорости платформы с застрявшим в песке снарядом направлен противоположно оси ОХ. Модуль этой скорости равен
означает, что вектор скорости платформы с застрявшим в песке снарядом направлен противоположно оси ОХ. Модуль этой скорости равен  = 1 (м/с).
= 1 (м/с).
Семинар 2.
1.Кинематика и динамика вращательного движения абсолютно твердого тела.
Угловая скорость ![]() - векторная физическая величина, характеризующая быстроту изменения угла поворота радиус-вектора и равная производной угла поворота по времени:
- векторная физическая величина, характеризующая быстроту изменения угла поворота радиус-вектора и равная производной угла поворота по времени:
 .
.
Вектор ![]() направлен вдоль оси вращения в соответствии с правилом правого винта и численно равен
направлен вдоль оси вращения в соответствии с правилом правого винта и численно равен
 .
.
Скорость ![]() произвольной точки вращающегося тела называют линейной скоростью этой точки.
произвольной точки вращающегося тела называют линейной скоростью этой точки.
Модули линейной и угловой скоростей связаны соотношением
 ,
,
где ![]() - расстояние от оси вращения до данной точки.
- расстояние от оси вращения до данной точки.
При равномерном вращении тела модуль угловой скорости можно определить по формуле
 , (21)
, (21)
где ![]() - период вращения тела (время одного оборота);
- период вращения тела (время одного оборота);
n - число оборотов тела за единицу времени.
Угловое ускорение - векторная физическая величина, характеризующая быстроту изменения угловой скорости и равная производной угловой скорости по времени:
 .
.
Если тело вращается вокруг неподвижной оси, то вектор ![]() также направлен вдоль оси вращения (при ускоренном вращении -
также направлен вдоль оси вращения (при ускоренном вращении - ![]() ↑↑
↑↑![]() , при замедленном вращении -
, при замедленном вращении - ![]() ↑↓
↑↓![]() ) и численно равен
) и численно равен
 .
.
Тангенциальное ускорение ![]() любой точки вращающегося тела связано с его угловым ускорением
любой точки вращающегося тела связано с его угловым ускорением ![]() соотношением
соотношением
 ,
,
где R - расстояние от данной точки до оси вращения.
При равнопеременном вращении тела вокруг неподвижной оси в одном направлении целесообразно координатную ось Oz направлять вдоль начальной угловой скорости ![]() или углового ускорения
или углового ускорения ![]() , если
, если ![]() =0. В этом случае
=0. В этом случае ![]() . Тогда по аналогии с уравнениями (2), (3), (4) поступательного движения можно написать:
. Тогда по аналогии с уравнениями (2), (3), (4) поступательного движения можно написать:
 ; (22)
; (22)
 ;
;
 . (23)
. (23)
Моментом силы ![]() относительно точки 0 называется векторное произведение радиус-вектора
относительно точки 0 называется векторное произведение радиус-вектора ![]() , проведенного из точки 0 в точку приложения силы, на вектор силы
, проведенного из точки 0 в точку приложения силы, на вектор силы ![]() :
:
 . (24)
. (24)
Проекция вектора ![]() на произвольную ось Oz, проходящую через точку 0, называется моментом силы относительно этой оси и обозначается
на произвольную ось Oz, проходящую через точку 0, называется моментом силы относительно этой оси и обозначается ![]() .
.
 ,
,
где ![]() - проекция силы
- проекция силы ![]() на плоскость, перпендикулярную оси Oz;
на плоскость, перпендикулярную оси Oz;
![]() - плечо силы
- плечо силы ![]() (кратчайшее расстояние от оси до линии действия силы
(кратчайшее расстояние от оси до линии действия силы ![]() ).
).
Мерой инертности тела во вращательном движении является момент инерции тела. Моментом инерции ![]() тела относительно данной оси является сумма моментов инерции всех материальных точек тела относительно этой оси:
тела относительно данной оси является сумма моментов инерции всех материальных точек тела относительно этой оси:
 ,
,
где ![]() - момент инерции материальной точки, отстоящей от оси вращения на расстояние
- момент инерции материальной точки, отстоящей от оси вращения на расстояние ![]() .
.
Если размеры тела достаточно велики по сравнению с расстоянием до оси вращения и его нельзя считать материальной точкой, то для определения момента инерции тела его следует разбить на элементарные массы dm и заменить сумму интегралом:
 ,
,
где ![]() - плотность вещества;
- плотность вещества;
![]() - элемент объема тела.
- элемент объема тела.
В качестве примера найдем момент инерции параллелепипеда со сторонами ![]() относительно оси, перпендикулярной плоскости
относительно оси, перпендикулярной плоскости ![]() и проходящей через его центр (рис. в табл. 1). Пусть плотность вещества параллелепипеда равна
и проходящей через его центр (рис. в табл. 1). Пусть плотность вещества параллелепипеда равна ![]() .
.
Выберем систему координат с началом отсчета на верхней грани параллелепипеда со сторонами ![]() , совпадающей с ее центром. Следует заметить, что начало координат относительно оси OZ, совпадающей с осью вращения, не влияет на момент инерции твердого тела. Выделим элементарный параллелепипед с основанием
, совпадающей с ее центром. Следует заметить, что начало координат относительно оси OZ, совпадающей с осью вращения, не влияет на момент инерции твердого тела. Выделим элементарный параллелепипед с основанием ![]() и высотой
и высотой ![]() на расстоянии
на расстоянии ![]() от оси вращения. Момент инерции элементарного параллелепипеда
от оси вращения. Момент инерции элементарного параллелепипеда
 .
.
Момент инерции параллелепипеда, как аддитивной величины, будет равен интегралу по всему объему параллелепипеда. Вычислим интеграл по ![]() объема параллелепипеда и умножим полученный результат на 4, т. е.
объема параллелепипеда и умножим полученный результат на 4, т. е.
 ,
,
где ![]() - масса параллелепипеда.
- масса параллелепипеда.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
