

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Южно-Уральский государственный университет
Филиал в г. Златоусте
Кафедра «Технология машиностроения, станки и инструмент»
681.5(07)
Д369
,
МОДЕЛИРОВАНИЕ СИСТЕМ
Учебное пособие к лабораторным работам
Челябинск
Издательский центр ЮУрГУ
2010
УДК 658.51(075.8)
Д369
Одобрено
учебно-методической комиссией филиала ЮУрГУ в г. Златоусте
Рецензенты:
,
Д369 | Дерябин, И. П. Моделирование систем: учебное пособие по выполнению лабораторных работ / , . – Челябинск: Издательский центр ЮУрГУ, 2010. – 72 с. |
Учебное пособие предназначено для студентов специальностей 151001 «Технология машиностроения» и 220301 «Автоматизация технологических процессов и производств (машиностроение)» для выполнения лабораторных работ по курсам «Математическое моделирование процессов в машиностроении», «Моделирование систем» и «Системы автоматизированного проектирования технологических процессов» (САПР ТП). Приведены основные теоретические положения, методика проведения работ, содержание отчетов, исходные данные. Все работы выполняются на компьютере. |
УДК 658.51(075.8)
ã Издательский центр ЮУрГУ, 2010
Лабораторная работа № 1
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПОВЕРХНОСТНОГО
ПЛАСТИЧЕСКОГО ДЕФОРМИРОВАНИЯ ПОВЕРХНОСТЕЙ
ТОРОИДАЛЬНЫМ РОЛИКОМ
При поверхностном пластическом деформировании деталей, для получения требуемой шероховатости, необходимо обеспечить определенное давление в зоне контакта, которое известным образом [1] зависит от площади пятна контакта.
Цель работы – определить размеры ролика (R и r) и угол его наклона (q) для обеспечения требуемой площади пятна контакта S при заданном натяге D.
Основные положения
При составлении расчетной схемы принимаем (рис. 1), что ролик 1 выполнен тороидальным из абсолютно жесткого материала. Обрабатываемая деталь 2 абсолютно плоская и в момент контакта имеет абсолютную податливость. Площадь контакта рассчитываем в проекции на плоскость, параллельную обрабатываемой поверхности.
Для определения координат профиля пятна контакта при принятых упрощениях нетрудно вывести расчетные формулы [1]:
 ; (1.1)
; (1.1)
 ; (1.2)
; (1.2)
 ; (1.3)
; (1.3)
 ; (1.4)
; (1.4)
 ; (1.5)
; (1.5)
 ; (1.6)
; (1.6)
 , (1.7)
, (1.7)
где ![]() ,
, ![]() – параметры, характеризующие расстояние от оси симметрии тора до его крайних сечений, контактирующих с плоскостью, мм;
– параметры, характеризующие расстояние от оси симметрии тора до его крайних сечений, контактирующих с плоскостью, мм;
r – радиус тора;
D – натяг, мм;
q – угол наклона торового ролика к плоскости обработки, град;
n – число шагов интегрирования (не более 30);
R – радиус от центра вращения до оси тора, мм;
j – пересчетный параметр, определяющий угловое расстояние от оси у до места контакта торового круга в сечении Ei с плоскостью обработки, град.;
Ri – значение радиуса окружности при пересечении тора плоскостью на расстоянии Ei от оси симметрии, мм.
Площадь пятна контакта описывается системой параметрических уравнений (1.6), (1.7), в которых параметром является расстояние от оси симметрии тора до секущей плоскости.

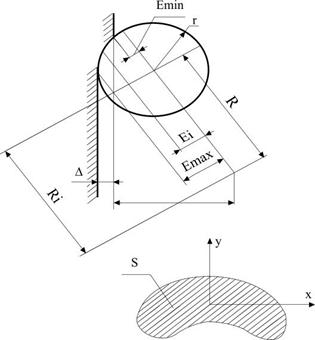
Рис. 1. Расчетная схема
Методика расчета
Для заданного значения натяга ![]() необходимо определить угол наклона q0 ролика, обеспечивающего заданное значение площади пятна контакта
необходимо определить угол наклона q0 ролика, обеспечивающего заданное значение площади пятна контакта ![]() .
.
Для вычисления площади пятна контакта, описываемой уравнениями (1.6), (1.7), используется метод трапеций. Площадь пятна контакта определяется по формуле
![]()
 , (1.8)
, (1.8)
где ![]() ,
, ![]() определяются по уравнениям (1.6), (1.7);
определяются по уравнениям (1.6), (1.7);
n – число шагов интегрирования или число участков, на которые разбивается площадь пятна контакта.
Изменяя значение угла наклона ролика q от 90° до заданного qmin с шагом 1–5°, вычисляем площадь пятна контакта по формулам (1.1–1.8) для каждого угла q от 90° до qmin. В результате получим зависимость площади ![]() от угла q. Эту зависимость можно проиллюстрировать графиком (рис. 2).
от угла q. Эту зависимость можно проиллюстрировать графиком (рис. 2).
По графику определяется угол q0, обеспечивающий заданную площадь пятна контакта ![]() .
.
|
Рис. 2. График зависимости ![]() от q
от q
Порядок проведения работы
1. Составить алгоритм и программу расчета площади пятна контакта.
2. Для своего варианта по табл. 1 определить значения qmin, ![]() и
и ![]() .
.
3. Выбрать типоразмер ролика по табл. 2.
4. По вычисленным на ЭВМ значениям ![]() для различных углов q построить график (см. рис. 2).
для различных углов q построить график (см. рис. 2).
5. По графику определить значения угла q, обеспечивающего заданное значение ![]() .
.
6. Если q<qmin, то необходимо взять другой типоразмер ролика и повторить расчеты.
Таблица 1
№ варианта | qmin |
|
| № варианта | qmin |
|
|
1 | 60 | 0,01 | 18 | 18 | 50 | 0,016 | 34 |
2 | 50 | 0,007 | 28 | 19 | 55 | 0,06 | 12 |
3 | 45 | 0,011 | 30 | 20 | 60 | 0,028 | 16 |
4 | 55 | 0,008 | 26 | 21 | 42 | 0,015 | 10 |
5 | 70 | 0,015 | 0,4 | 22 | 53 | 0,21 | 40 |
6 | 75 | 0,02 | 0,6 | 23 | 48 | 0,19 | 39 |
7 | 60 | 0,025 | 36 | 24 | 41 | 0,18 | 37 |
8 | 55 | 0,012 | 25 | 25 | 44 | 0,17 | 33 |
9 | 70 | 0,018 | 32 | 26 | 52 | 0,16 | 42 |
10 | 40 | 0,03 | 40 | 27 | 48 | 0,15 | 41 |
11 | 65 | 0,006 | 20 | 28 | 54 | 0,14 | 27 |
12 | 45 | 0,014 | 10 | 29 | 38 | 0,13 | 25 |
13 | 50 | 0,013 | 8 | 30 | 46 | 0,055 | 24 |
14 | 55 | 0,05 | 38 | 31 | 49 | 0,048 | 22 |
15 | 60 | 0,04 | 35 | 32 | 51 | 0,067 | 21 |
16 | 40 | 0,025 | 29 | 33 | 56 | 0,082 | 19 |
17 | 45 | 0,03 | 42 |
Таблица 2
Параметры | Тип ролика | |||||
1 | 2 | 3 | 4 | 5 | 6 | |
R | 25 | 30 | 20 | 34 | 25 | 33 |
r | 4 | 5 | 3 | 6 | 5 | 4 |
Содержание отчета

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 |
