

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Решение.
1. Рассмотрим равновесие балки AB, на которую в точках С и D действуют две вертикальные нагрузки ![]() и
и ![]() (рис. 37, б).
(рис. 37, б).
2. Освободив правый конец балки от связи и заменив ее действие реакцией , направленной перпендикулярно к опорной поверхности, увидим, что на балку действует система параллельных сил. Поэтому, если освободить и левый конец балки от шарнирно-неподвижной опоры, то ее реакция будет также направлена вертикально (рис. 37, б).
3. Составим систему уравнений равновесия, приняв для одного уравнения за центр моментов точку А, а для другого – точку В:
 (1)
(1)
 (2)
(2)
4. Решая уравнения, из (1) находим

из (2)

5. Проверим правильность решения, составив уравнение проекций сил на вертикальную ось у:

Подставляя в это уравнение числовые значения, получаем тождество
14 – 10 – 20 + 16 = 0 или 0 = 0.
Значит задача решена правильно. Реакции опор: RА = 14 кH и RB = 16 кН.
При решении задач рекомендуется не пренебрегать проверкой. От правильности определения реакций опор зависит правильность всего остального решения или расчета.
Задача 21. На консольную балку, имеющую в точке А шарнирно-неподвижную, а в точке В шарнирно-подвижную опору, действуют две сосредоточенные нагрузки: P1 = 18 кН и Р2 = 50 кH, как показано на рис. 38, а; угол a = 40°. Определить реакции опор балки.
Решение.
1. Рассматривая находящуюся в равновесии балку AD, видим, что в точке С на нее действует вертикально вниз нагрузка ![]() , а в точке D под углом a к АВ действует другая нагрузка
, а в точке D под углом a к АВ действует другая нагрузка ![]() (рис. 38, б).
(рис. 38, б).
2. Освобождаем балку от связей и заменим их действие реакциями. В месте шарнирно-подвижной опоры В возникает вертикальная реакция Направление реакции шарнирно-неподвижной опоры в данном случае непосредственно определить нельзя, поэтому заменим эту реакцию ее двумя составляющими и ![]() .
.
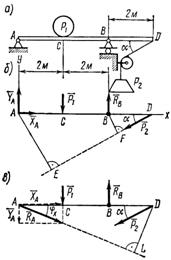
Рис. 38
3. Для полученной системы из пяти сил, произвольно расположенных в плоскости, составим систему уравнений равновесия, расположив ось х вдоль балки, а за центры моментов приняв точки А и В:
 (1)
(1)
 (2)
(2)
 (3)
(3)
4. Решаем полученные уравнения. Из (1)
 кН.
кН.
Так как АЕ = AD sin a, то из (2)
 кН.
кН.
Замечая, что BF = BD sin a, из (3) получаем

Знак минус, получившийся в последнем случае, показывает, что YА – вертикальная составляющая реакция неподвижного шарнира – направлена вниз, а не вверх, как предполагалось перед составлением уравнения (3).
5. При необходимости реакцию шарнира А легко определить (рис. 38, в).
Модуль реакции шарнира А найдем из формулы

Направление реакции установим, определив угол:

откуда 
6. Проверим правильность решения задачи. Так как при решении не использовано уравнение проекций на ось у, то используем его для проверки:

Уравнение составлено по рис. 38, б.
После подстановки в это уравнение известных значений получим:
– 7,1 – 18 + 57,2 – 50 sin 40° = 0;
– 25,1 + 57,2 – 32,1 = 0 и 0 = 0.
В данном случае, проверка решения при помощи уравнения проекций не дает возможности установить правильность определения полной реакции шарнира А. Чтобы проверить и этот этап решения, составим уравнение моментов относительно точки D, воспользовавшись рис. 38, в, на котором изображена реакция так, как она направлена в действительности:

Подставляем в это уравнение числовые значения, имея в виду, что


Расхождение в результатах, равное 0,3, получается из-за округлений при вычислениях.
В следующих задачах проверка решения не приводится и ее рекомендуется производить самостоятельно.
Задача 22. Горизонтальная балка имеет в точке А шарнирно-подвижную опору, плоскость которой наклонена к горизонту под углом a = 24° (рис. 39, а), а в точке В – шарнирно-неподвижную опору. Балка нагружена в точках С и D двумя сосредоточенными силами P1 = 24 кН и Р2 = 30 кН. Определить реакции опор.

Рис. 39
Решение.
1. Балка нагружена двумя параллельными силами, реакция подвижного шарнира направлена не параллельно вертикальным нагрузкам, а под углом a к вертикали – перпендикулярно к опорной поверхности шарнира (рис. 39, б). Поэтому реакция неподвижного шарнира не будет направлена вертикально, и ее целесообразно заменить двумя составляющими и ![]() .
.
2. Расположив оси х и у, как показано на рис. 39, б, составляем уравнения равновесия:
 (1)
(1)
 (2)
(2)
 (3)
(3)
3. Решаем полученные уравнения. Из уравнения (3) находим YB:

Из уравнения (2) находим RA:
 кН.
кН.
Из уравнения (1) находим ХВ:
 кН.
кН.
Таким образом, реакция шарнира A RA = 28,7 кН, а составляющие реакции шарнира В ХВ = 12,1 кН и YB = 28 кН.
4. Проверку решения производим при помощи уравнения моментов относительно точки С или D.
§ 10. Виды опор балочных систем.
Определение опорных реакций
Балками называют такие элементы конструкций машин, приборов, сооружений, которые в процессе работы воспринимают в основном поперечные относительно оси нагрузки и передают их через опорные устройства другим элементам конструкции или основанию. Примером могут служить такие детали машин, как валы, оси, рычаги, детали строительных конструкций, фермы мостов и т. п.
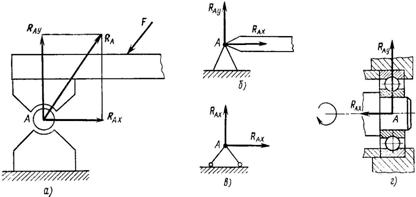
Рис. 40
Конструкции опор балок можно свести к трем видам.
Шарнирно-неподвижная опора препятствует любому поступательному перемещению балки, но дает возможность последней поворачиваться вокруг оси шарнира (рис. 40, а). Реакция приложена в центре шарнира А. Для определения неизвестных модуля и направления реакции RA необходимо ее заменить взаимно перпендикулярными составляющими RAx и RAy. На рис. 40, б и в показаны схематические изображения этой опоры. В качестве примера шарнирно-неподвижной опоры может служить подшипниковый узел (рис. 40, г).
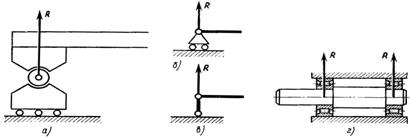
Рис. 41
Шарнирно-подвижная опора – нижняя часть поставлена на катки (рис. 41, а), поэтому такая опора не препятствует небольшому перемещению балки в направлении, параллельном опорной поверхности. Реакция опоры в данном случае приложена в центре шарнира и направлена по нормали к опорной поверхности (трением катков пренебрегаем). Схематическое изображение показано на рис. 41, б и в. На рис. 41, г показана шарнирно-подвижная (плавающая) опора вала.
Жесткая заделка (рис. 42) препятствует любому поступательному движению балки и повороту последней в плоскости действия сил. Поэтому, кроме реакции RA, которую мы раскладываем на RAx и RAy, со стороны заделки к балке приложен еще опорный момент МA – уравновешивающий момент активных сил, стремящихся повернуть балку.
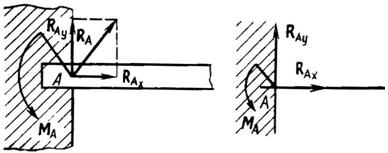
Рис. 42
Задача 23. Определить опорные реакции балки (рис. 43), нагруженной парой М = 4 Нм, и равномерно распределительной по длине l = 0,3 м нагрузкой, интенсивность которой q = 2 Н/м; весом балки пренебрегаем.
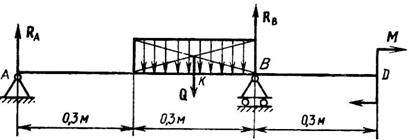
Рис. 43
Решение.
Мысленно освободив балку от связей и заменив их реакциями RA и RB получим уравновешенную систему параллельных сил. Равномерно распределенная нагрузка задана величиной интенсивности и длиной участка, на котором она распределена. Для решения задачи необходимо заменить ее равнодействующей силой Q = ql, приложенной в середине этого участка в точке К.
Для решения составим следующие уравнения равновесия:
Откуда 

Знак «минус» указывает на то, что реакцию RA нужно направить вниз, а не вверх, как мы сделали предварительно.
Для проверки используем уравнение
Полученное тождество указывает на правильность решения.
Задача 24. Определить реакцию жесткой заделки и опорный момент для балки, нагруженной, как указано на рис. 44. В заделке возникают вертикальная реакция RA и опорный момент MR. Горизонтальная составляющая отсутствует, так как нет сил, стремящихся сдвинуть балку в горизонтальном направлении.
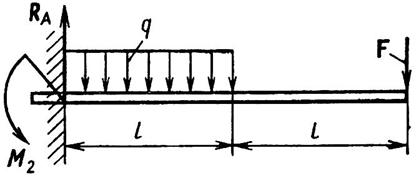
Рис. 44
Решение.
Для решения задачи составим два уравнения равновесия:


откуда 
Задача 25. На консольную балку, имеющую в точке А шарнирно-неподвижную, а в точке В шарнирно-подвижную опору, действуют две нагрузки (рис. 45, а): в точке D – сосредоточенная нагрузка P = 8 кН, а на участке СВ – равномерно распределенная нагрузка, интенсивностью q=2 кН/м. Определить реакции опор.
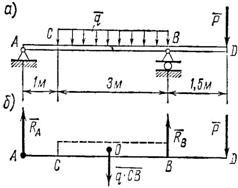
Рис. 45
Решение.
1. В этой задаче, кроме сосредоточенной силы Р, на участке СВ действует равномерно распределенная сила, интенсивность которой q. Полная величина этой нагрузки (ее равнодействующая) равна q × CB и приложена в точке О посредине участка СВ (рис. 45, б), т. е.
 .
.
Реакция подвижного шарнира направлена вертикально (перпендикулярно к опорной поверхности). Следовательно, и реакция неподвижного шарнира направлена вертикально. Таким образом, на балку действует система параллельных сил ( рис. 45, б).
3. Составим два уравнения моментов относительно точек В и А:
 ; (1)
; (1)
 (2)
(2)
4. Из уравнения (1)
 кН.
кН.
Отрицательное значение реакции RA означает, что она направлена вниз, а не вверх, как показано на рис. 45, б, потому что момент силы Р относительно опоры В больше, чем момент равномерно распределенной нагрузки.
Из уравнения (2) находим RB:
 кН.
кН.
Таким образом, реакция шарнира А равна RA = 0,75 кH и направлена вертикально вниз; реакция шарнира В составляет Rв = 14,25 кH и направлена вертикально вверх.
5. Для проверки решения можно использовать уравнение проекций на вертикальную ось.
Глава 3. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ
§ 11. Пространственная система
сходящихся сил
Плоская система сил, которую мы рассматривали до сих пор, является частным случаем общей пространственной системы сил. На практике в большинстве случаев встречаются пространственные системы сил, которые можно разложить на несколько плоских систем. Но бывают случаи, когда этого сделать нельзя, и тогда нужно рассматривать пространственную систему. Простейшей пространственной системой является система, состоящая из трех сил, приложенных в одной точке.
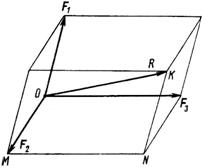
Рис. 46
Пусть дана система из трех сил: F1, F2, F3, приложенная в точке О (рис. 46). Чтобы найти равнодействующую системы, построим пространственный силовой многоугольник OMNK. Замыкающая стороны этого многоугольника ОK по модулю и направлению равна равнодействующей данной системы:

Если достроить многоугольник до параллелепипеда, как указано на рис. 43, то увидим, что равнодействующая R является его диагональю, а силы F1, F2 и F3 – его сторонами.
Следовательно, равнодействующая трех сил, приложенных в одной точке и не лежащих в одной плоскости, по модулю и направлению равна диагонали параллелепипеда, построенного на данных силах.
Если равнодействующая система сходящихся сил равна нулю R = 0, то силы находятся в равновесии и силовой многоугольник замкнут.
Пусть сила R есть равнодействующая пространственного пучка сил F1, F2, F3, …,Fn. Разложим силу R согласно правилу параллелепипеда на три составляющие: Rx, Ry, и Rz, направленные по трем взаимно перпендикулярным осям (рис. 47). Рассматривая силу R как равнодействующую трех составляющих: Rx, Ry и Rz, отметим, что она представляет собой диагональ прямоугольного параллелепипеда и ее модуль:
 , (15)
, (15)
где Rx, Ry, и Rz — проекции вектора R на координатные оси.
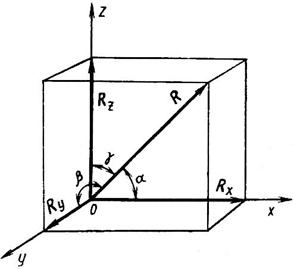
Рис. 47
Направление равнодействующей определяется косинусами углов между силой R и осями координат:
 (16)
(16)
Согласно теореме о проекции равнодействующей на ось имеем
Если система сходящихся сил находится в равновесии, то
значит,
 (17)
(17)
Уравнения (17) выражают условия равновесия пространственной системы сходящихся сил; из них следует, что пространственная система сходящихся сил находится в равновесии, если алгебраические суммы проекций составляющих сил на три взаимно перпендикулярные оси равны нулю.
Задача 26. Найти усилия в стержне АВ (рис. 48) и цепях АС и AD, поддерживающих груз G = 10 кН, если a = 60°, b = 30°, g = 45°. ACED – прямоугольник, лежащий в горизонтальной плоскости. Крепление в точке В шарнирное.
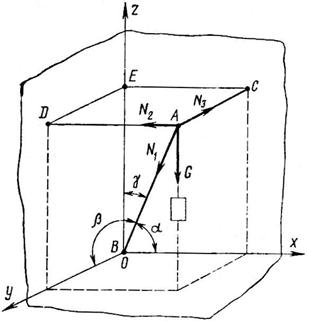
Рис. 48
Решение.
Освободившись от связей и заменив их реакциями, имеем в точке А систему сходящихся сил (N1, N2, N3 и G). Выбрав направление координатных осей, составляем уравнения равновесия:
Решая уравнения, получим:

где знак «минус» указывает на то, что стержень АВ сжат, а не растянут, как мы вначале предположили:

Задача 27. Переносный кран, поднимающий груз массой m = 2000 кг, устроен так, как указано на рис. 45, a; AB = AD = AE = 2 м; угол DAE = 120°, плоскость ABC, в которой расположена стрела АС крана, делит двугранный угол DAE пополам. Определить силу, сжимающую вертикальную стойку АВ, и силы, растягивающие тросы BD и BF; весом частей крана пренебречь.

Рис. 49
Решение.
1. В задаче рассматривается равновесие системы тел – стрелы и стойки, связанных струной ВС. Прежде чем приступить к определению усилий в стойке и тросах, необходимо найти натяжение струны ВС.
2. В точке С на кран действует вес ![]() груза, масса которого m, следовательно,
груза, масса которого m, следовательно,
G = mg = 2000 × 9,81 = 19600 H = 19,6 кH.
Разложим вес ![]() на две составляющие, действующие вдоль струны ВС и стрелы АС, воспользовавшись правилом треугольника (рис. 49, б). Для этого из произвольной точки K построим вектор
на две составляющие, действующие вдоль струны ВС и стрелы АС, воспользовавшись правилом треугольника (рис. 49, б). Для этого из произвольной точки K построим вектор ![]() а затем из его начала и конца проведем линии, параллельные ВС и АС. В получившемся силовом треугольнике KLM (КL || ВС и LM || CA) сторона KL изображает силу растягивающую струну ВС, а сторона LM – силу
а затем из его начала и конца проведем линии, параллельные ВС и АС. В получившемся силовом треугольнике KLM (КL || ВС и LM || CA) сторона KL изображает силу растягивающую струну ВС, а сторона LM – силу ![]() сжимающую стрелу АС.
сжимающую стрелу АС.
Из построения следует, что  , поэтому Отсюда
, поэтому Отсюда  .
.
Неизвестную по условию задачи длину струны ВС легко найти, рассмотрев прямоугольный треугольник BCF (см. рис. 49, а):
 .
.
Таким образом, кН.
3. Перенесем силу вдоль линии ее действия из точки С в точку В и рассмотрим равновесие узла В, на который, кроме нагрузки РС = 45,3 кН, действуют реакции трех связей: ![]() – реакция стойки, и
– реакция стойки, и ![]() – реакции тросов BD и BE. В соответствии с общим правилом считаем, что все связи растянуты (рис. 49, в).
– реакции тросов BD и BE. В соответствии с общим правилом считаем, что все связи растянуты (рис. 49, в).
4. Расположим систему координатных осей, как показано на рис. 49, в, и составим три уравнения равновесия:
 (1)
(1)
 (2)
(2)
 (3)
(3)
Замечая, что g = 45° (так как треугольники ВАЕ и BAD имеют равные катеты BA = AE =AD и a = b = 60°), решаем получившиеся уравнения.
Из уравнения (2) РЕ= PD.
Теперь уравнения (1) и (3) примут такой вид:
 (4)
(4)
 (5)
(5)
Умножим обе части уравнения (5) на cos b и сложим его после этого с уравнением (4):

Отсюда
 PA= – 55,8 кН.
PA= – 55,8 кН.
Знак «минус» указывает на то, что реакция направлена не от узла В, а к узлу, т. е. стойка сжата силой 55,8 кН.
Подставив найденное значение РА = – 55,8 кН в уравнение (5), найдем реакции РЕ и PD:
 кН.
кН.
Тросы AD и AE растянуты усилиями по 55,4 кН.
§ 12. Момент силы относительно оси
Если к телу, имеющему ось вращения, приложить силу F, то она будет стремиться вращать тело вокруг этой оси. В этом случае действие силы на тело измеряется величиной момента силы относительно оси (рис. 50).
Момент силы относительно оси равен взятому со знаком «плюс» или «минус» произведению модуля проекции силы на плоскость, перпендикулярную этой оси (F'), на кратчайшее расстояние а (плечо) от этой проекции до точки пересечения оси с плоскостью:

где F' = F cos a – модуль проекции силы F на плоскость (a – угол наклона линии действия силы к плоскости); а – плечо, следовательно:
 (18)
(18)
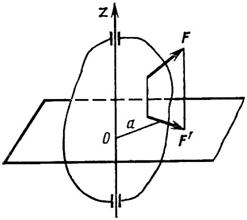
Рис. 50
Условимся считать момент положительным, если наблюдатель, смотрящий на плоскость со стороны положительного конца оси, видит возможное вращение плоскости по часовой стрелке. В противном случае – момент отрицательный. Из формулы (18) следует, что момент силы относительно оси равен нулю в двух случаях: если сила параллельна оси (сила F1 рис. 51), т. е. при a = 90° или 270°, когда cos a = 0, и если a = 0, т. е. линия действия силы пересекает ось (сила F2). Момент силы относительно оси будет наибольшим, если a = 0, т. е. сила лежит в плоскости, перпендикулярной оси (сила F3). Тогда Мz(F3) = F3a.
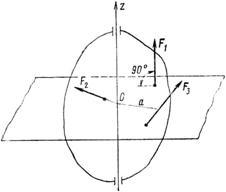
Рис. 51
Задача 28. К вершинам квадрата ABCD(AB = AD = 2 м), расположенного в горизонтальной плоскости, приложены силы , , и , как показано на рис. 52. Сила направлена по диагонали АС; сила действует вверх перпендикулярно к плоскости квадрата; сила действует в плоскости квадрата, и ее направление образует с диагональю СА угол a = 20°; сила действует в плоскости, перпендикулярной к плоскости квадрата, и направлена к стороне DC под углом b = 30°. Определить моменты каждой силы относительно осей х, у и z. Модули сил P1 = Р2 = Р3 = Р4 = 5 кН.
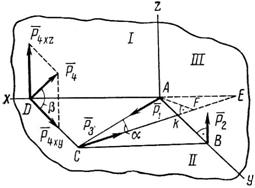
Рис. 52
Решение.
1. Замечаем, что расположение осей, показанное на рис. 52, определяет положение трех взаимно перпендикулярных плоскостей; плоскости I, перпендикулярной к оси у, плоскости II, перпендикулярной к оси z, и плоскости III, перпендикулярной к оси х.
2. Определяем моменты силы . Сила приложена в точке А пересечения всех трех осей, следовательно, согласно первому частному случаю,

3. Определяем моменты силы .
Сила , приложенная в точке В, пересекает ось у и параллельна оси z. Следовательно, согласно первому и второму частным случаям

Чтобы определить момент силы относительно оси х, необходимо найти проекцию на плоскость III, перпендикулярную к оси х. Сила расположена в этой плоскости и, следовательно, проектируется полностью Р2yz = Р2. Плечом является сторона АВ квадрата. Знак момента положительный, так как если посмотреть от точки D вдоль оси х на плоскость III, то увидим, что сила поворачивает плечо АВ против хода часовой стрелки. Поэтому
 кН×м.
кН×м.
4. Определяем моменты силы ![]() .
.
Сила ![]() расположена в горизонтальной плоскости. В этой же плоскости расположены оси х и у. Поэтому линия действия силы
расположена в горизонтальной плоскости. В этой же плоскости расположены оси х и у. Поэтому линия действия силы ![]() пересекает ось х (в точке Е) и ось у (в точке К). Значит,
пересекает ось х (в точке Е) и ось у (в точке К). Значит,

Плоскость, в которой расположена сила ![]() , перпендикулярна оси z, значит, Р3ху = Р3. Плечо AF силы
, перпендикулярна оси z, значит, Р3ху = Р3. Плечо AF силы ![]() найдем из треугольника AFC:
найдем из треугольника AFC:

Знак момента положительный (если посмотреть на плоскость II со стороны оси z). Поэтому
 кН×м.
кН×м.
5. Определяем моменты силы ![]() . Линия действия силы
. Линия действия силы ![]() пересекает ось х, следовательно,
пересекает ось х, следовательно,

Спроектируем силы ![]() на плоскости I и II:
на плоскости I и II:
 ;
;
плечом силы ![]() является сторона квадрата AD.
является сторона квадрата AD.
 кН×м;
кН×м;
 кН×м.
кН×м.
§ 13. Условия равновесия произвольной
пространственной системы сил
Пространственную систему произвольно расположенных сил, как и плоскую систему, можно привести к простейшему виду, т. е. к главному вектору и главному моменту. Для этого, выбрав центр приведения, переносим в него параллельно все силы системы, одновременно присоединяя соответствующие пары. В результате в центре приведения получим пространственную систему сходящихся сил и пространственную систему пар. Сложив все силы пучка, найдем главный вектор системы. Его значение можно определить по формуле
где 
Складывая присоединенные пары, получим результирующую пару, момент которой называют главным моментом системы. Зная, что момент пары – вектор, разложим вектор главного момента по правилу параллелепипеда на три составляющие, направленные по трем взаимно перпендикулярным осям (рис. 53) Мx, Мy, и Мz. Тогда модуль главного момента можно определить по формуле
где Мх, My и Мz – проекции главного момента на оси.
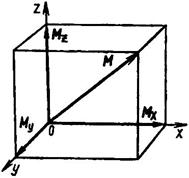
Рис. 53
Можно доказать, что проекции Мх, Му и Мz, каждая соответственно равна алгебраической сумме моментов всех сил данной системы относительно осей координат, т. е.

Чтобы пространственная система сил была в равновесии, необходимо соблюдение условий R0 = 0 и М = 0, т. е.
![]()
 , и
, и 
что соответствует шести уравнениям равновесия:
 (19)
(19)
Итак, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на каждую из трех осей координат равнялась нулю и чтобы алгебраическая сумма моментов всех сил относительно каждой из трех осей координат равнялась нулю. В частном случае, если линии действия всех сил параллельны, выбрав ось z параллельно силам, а оси х и у перпендикулярно силам, получим следующие условия равновесия:
 (20)
(20)
Задача 29. Вал ворота и его рукоятка расположены в одной вертикальной плоскости (рис. 54). Груз G = 500 кН, подвешенный на вороте, удерживается в равновесии горизонтальной силой F, приложенной в середине рукоятки перпендикулярно к ней. Пренебрегая весом вала, определим силу F и реакции подшипников А и В.
Решение.
1. Приложим к вороту активные силы F и G.
2. Реакции подшипников разложим на составляющие RAx, RAz, RBx, RBz. Составляющие RAy и RBy отсутствуют, поскольку активные нагрузки действуют в плоскостях, перпендикулярных оси вала, и не могут смещать вал вдоль его оси.
3. Составим уравнения равновесия:
4. После решения уравнений получим: F = 250 кН; RAx = – 350 кН; RAz = 250 кН; RBx = –600 кН; RBz = 250 кН.
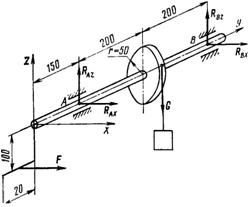
Рис. 54
Задача 30. Квадратная крышка весом 400 H удерживается приоткрытой на 60° над горизонтальной плоскостью противовесом Q (рис. 55). Определить, пренебрегая трением на блоке D, вес противовеса Q и реакции шарниров A и B, если блок D укреплен на одной вертикали с шарниром А и AD = АС.
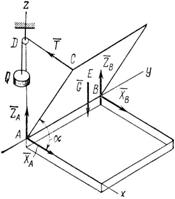
Рис. 55
Решение.
1. Выбрав за начало координат точку А и расположив оси так, как показано на рис. 55, покажем на этом же рисунке активные силы и реакции опор.
На крышку действует сила тяжести ![]() которую считаем приложенной в точке Е (центр симметрии квадрата), и реакция нити CD, приложенная в точке С. Сила Т численно равна весу Q противовеса. Действие этих сил уравновешивается реакциями шарниров А и В. Так как силы и
которую считаем приложенной в точке Е (центр симметрии квадрата), и реакция нити CD, приложенная в точке С. Сила Т численно равна весу Q противовеса. Действие этих сил уравновешивается реакциями шарниров А и В. Так как силы и ![]() действуют в плоскостях, перпендикулярных к оси у, то реакции шарниров лежат в плоскостях, перпендикулярных к той же оси. Поэтому реакцию шарнира А заменим двумя составляющими и , а реакцию шарнира В – составляющими и
действуют в плоскостях, перпендикулярных к оси у, то реакции шарниров лежат в плоскостях, перпендикулярных к той же оси. Поэтому реакцию шарнира А заменим двумя составляющими и , а реакцию шарнира В – составляющими и ![]() .
.
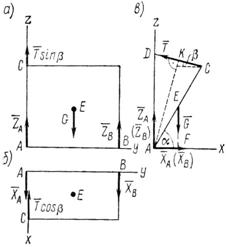
2. Если составление уравнений равновесия по рис. 55 затруднительно, можно предварительно изобразить крышку вместе с действующими на нее силами в трех проекциях, как это сделано на рис. 56:
а) вид спереди, ось х перпендикулярна к плоскости проекции;
б) вид сверху, ось z перпендикулярна к плоскости проекции;
в) вид слева, ось у перпендикулярна к плоскости проекции.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
