

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
3. Изобразим скорость vА= 4 м/сек вектором, перпендикулярным к ОА. Разложим ее на составляющие ![]() и
и  как показано на рис. 76, б. Вектор изображает искомую скорость кулисы.
как показано на рис. 76, б. Вектор изображает искомую скорость кулисы.
4.  (как углы с взаимно перпендикулярными сторонами) и, следовательно,
(как углы с взаимно перпендикулярными сторонами) и, следовательно,

Таким образом, в данный момент кулиса перемещается вниз со скоростью 2 м/с.
Чтобы лучше проанализировать движение кулисы, необходимо знать, когда кулиса двигается ускоренно, когда замедленно, при каких положениях кривошипа кулиса имеет максимальную скорость и чему равна эта скорость, при каких положениях кривошипа скорость кулисы равна нулю?
Глава 6. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 22. Плоскопараллельное движение тела
Подобно сложному движению точки движение тела относительно неподвижной системы отсчета удобно в некоторых случаях считать сложным, т. е. состоящим из относительного и переносного движений. Обычно составляющие части сложного движения – это простейшие движения тела: поступательное и вращательное.
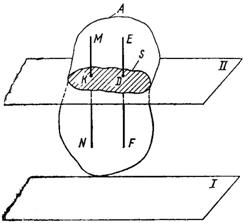
Рис. 81
Рассмотрим один из случаев сложного движения тела, широко встречающийся в технике – это так называемое плоскопараллельное движение. Оно получается в том случае, когда все точки движущегося твердого тела перемещаются в плоскостях, параллельных данной неподвижной плоскости. Таково, например, движение шатуна в кривошипно-шатунном механизме, движение сателлитов в планетарном механизме, качение колеса по прямолинейному рельсу и т. д.
Пусть твердое тело А (рис. 81) движется параллельно неподвижной плоскости I. Пересечем тело плоскостью II, параллельной плоскости I. Получим в сечении фигуру S, которая, перемещаясь вместе с телом, остается все время в плоскости II.
Отрезок MN, проведенный перпендикулярно к плоскости сечения S, во время движения остается все время перпендикулярным к плоскостям II и I, т. е. перемещается параллельно своему первоначальному положению – значит, движется поступательно. Все точки прямой MN, а следовательно, и точка К, лежащая в плоскости фигуры S, имеют одинаковые траектории скорости и ускорения.
Аналогичные рассуждения можно привести в отношении прямой EF и любой другой прямой тела А.
Так как движение точки К такое же, как и всех точек, лежащих на прямой MN, а движение точки D – всех точек прямой EF, то, очевидно, можно утверждать, что движение фигуры S в плоскости II определяет движение всего тела А. Поэтому для изучения плоскопараллельного движения тела достаточно изучить движение плоской фигуры в ее плоскости.
Рассмотрим движение фигуры S (рис. 82) в плоскости II относительно неподвижно связанных с этой плоскостью осей хОу. Пусть оси x1O1y1 будут связаны с движущейся фигурой S – это подвижные оси.
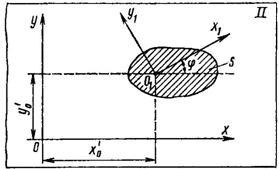
Рис. 82
Положение фигуры S в ее плоскости будет определяться положением подвижной системы осей относительно неподвижной, т. е. координатами центра 01 и углом поворота j. Иначе, положение фигуры S в данный момент времени можно определить, если будут известны функции
 (39)
(39)
которые называют уравнениями плоскопараллельного движения. Если при движении будет оставаться постоянным угол j (j = const), то тело движется поступательно и уравнениями его движения будут функции 
 Если при движении не будут изменяться координаты центра О, т. е.
Если при движении не будут изменяться координаты центра О, т. е.  и
и  то тело совершает вращательное движение, которое описывается уравнением j = f(t).
то тело совершает вращательное движение, которое описывается уравнением j = f(t).
Приведенные рассуждения позволяют сделать вывод, что поступательное и вращательное движения можно рассматривать как частные случаи плоскопараллельного движения тела.
§ 23. Определение скорости точки тела
при плоскопараллельном движении
Рассмотрим движение плоской фигуры в своей плоскости (рис. 83). Пусть полюсом служит точка А. Сложное движение фигуры состоит из поступательного вместе с полюсом со скоростью VA и вращательного вокруг этого полюса с угловой скоростью w. Поступательное движение является переносным, вращательное – относительным. Теперь мы можем найти абсолютную скорость любой другой точки тела В как геометрическую сумму двух скоростей: переносной скорости поступательного движения, равной скорости полюса: VBпер = VA, и относительной скорости вращательного движения вокруг полюса: 
 . (40)
. (40)
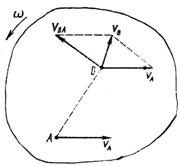
Рис. 83
Причем вектор перпендикулярен радиусу вращения АВ и направлен в сторону вращения. Модуль его  где w – угловая скорость тела. При решении таких задач обычно в качестве полюса принимают точку, скорость которой в данный момент времени известна.
где w – угловая скорость тела. При решении таких задач обычно в качестве полюса принимают точку, скорость которой в данный момент времени известна.
Задача 54. В четырехзвенном механизме (рис. 84) кривошип ОА вращается равномерно с частотой п = 300 об/мин. Для заданного положения механизма, при котором кривошип ОА перпендикулярен шатуну АВ и < ABC = 45°, определить угловую скорость звена (коромысла) ВС, если ОА = 0,12 м, АВ = 0,3 м и ВС = 0,14 м.
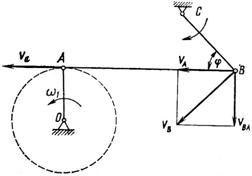
Рис. 84
Решение.
1. Шатун механизма АВ совершает плоскопараллельное движение. Выберем в качестве полюса точку А, скорость которой VA направлена перпендикулярно радиусу кривошипа ОА в сторону вращения, модуль последней легко определить из выражения:
 м/с.
м/с.
2. Абсолютную скорость точки В шатуна найдем как геометрическую сумму двух составляющих скоростей: поступательного движения, равной VА, и окружной относительно полюса – VВА, направленной перпендикулярно АВ. Точка В принадлежит коромыслу ВС, которое совершает вращение относительно центра С, следовательно, ее абсолютная скорость VВ направлена перпендикулярно ВС и также направлена в сторону его вращения. Учитывая это, построим параллелограмм, диагональю которого будет вектор VВ, а сторонами векторы VВА и VA.
Угол между VВ и VA равен 45°, поэтому
 м/с.
м/с.
3. Искомую угловую скорость коромысла найдем из выражения

 рад/с.
рад/с.
§ 24. Мгновенный центр скоростей
Определим в данный момент времени абсолютную скорость некоторой точки С плоской фигуры, которая лежит на прямой, перпендикулярной вектору скорости полюса V0. Причем, пусть расстояние  где w – угловая скорость фигуры (рис. 85). Нетрудно убедиться, что абсолютная скорость этой точки будет равна нулю, так как направления векторов относительной скорости Vco и переносной V0 противоположны, а их модули равны.
где w – угловая скорость фигуры (рис. 85). Нетрудно убедиться, что абсолютная скорость этой точки будет равна нулю, так как направления векторов относительной скорости Vco и переносной V0 противоположны, а их модули равны.

Рис. 85
Действительно, 
Очевидно, если скорость некоторой точки С движущейся фигуры равна нулю, то фигура в данный момент времени совершает вращательное движение вокруг рассматриваемой точки (либо твердое тело вращается вокруг оси, проходящей через точку С перпендикулярно плоскости чертежа). Эту точку называют мгновенным центром скоростей (МЦС), или мгновенным центром вращения.
Положение мгновенного центра скоростей непрерывно изменяется с течением времени.
Таким образом, сложное плоскопараллельное движение тела можно упростить, представив его в виде последовательного ряда мгновенных вращений вокруг центров (осей), занимающих различные положения.
Если, например, в данный момент времени МЦС находится в точке С (рис. 86), то скорости любых других точек А и В будут перпендикулярны к прямым, соединяющим эти точки с точкой С, и направлены в сторону вращения, а их модули  и
и 
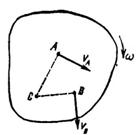
Рис. 86
Зная положение мгновенного центра скоростей и угловую скорость вращения плоской фигуры, можно найти скорость любой точки тела.
Если известны скорости двух произвольных точек фигуры (например vА и vВ), то мгновенный центр скоростей находится в точке пересечения перпендикуляров, восстановленных к этим векторам. Иногда мгновенный центр скоростей С может располагаться и вне фигуры, но в ее плоскости (рис. 87).
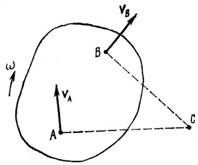
Рис. 87
Модули мгновенных скоростей различных точек фигуры пропорциональны расстояниям от этих точек до мгновенного центра скоростей.
Действительно,  ;
;  отсюда
отсюда

Если же векторы скоростей двух точек фигуры в данный момент времени параллельны другу к другу, то возможны следующие случаи.
1. Векторы скоростей двух точек не перпендикулярны прямой АВ, соединяющей эти точки (рис. 88, а). Перпендикуляры к векторам VA и VB параллельны. Это значит, что МЦС находится в бесконечности, т. е. нет вращения – фигура движется поступательно и VA = VB.
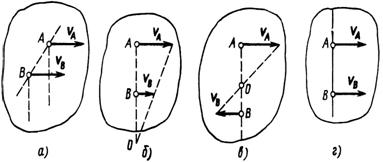
Рис. 88
2. Векторы скоростей точек А и В перпендикулярны к прямой АВ, соединяющей эти точки. Для определения положения МЦС нужно соединить прямой линией концы векторов и найти точку С пересечения этой линии с прямой АВ (рис. 88, б и в). Очевидно, что в этих случаях также справедливо равенство отношений VA/VB = AC/ВС.
3. В случае, изображённом на рис. 88, г (VA = VB), находится в бесконечности – фигура движется поступательно.
Если плоская фигура движется так, что ограничивающий её контур катится без скольжения по некоторой неподвижной кривой, то мгновенный центр скоростей С находится в точке касания контура и неподвижной кривой (рис. 89).
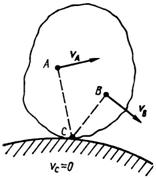
Рис. 89
Задача 55. В четырехзвенном механизме ОАВС (рис. 90) точка А движется по круговой траектории радиусом ОА = 0,15 м, а точка В – по дуге радиусом BС = 0,3 м, ОС = 0,5 м. Определить для данного положения механизма скорость точки В, если vA = 4,55 м/с.
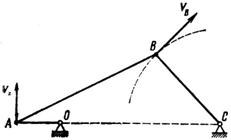
Рис. 90
Решение.
Скорость точки А шатуна, общей с кривошипом ОА, направлена перпендикулярно к радиусу вращения АО, в то время как скорость точки В шатуна, общей со звеном ВС, направлена перпендикулярно радиусу вращения ВС.
Таким образом, направления скоростей двух точек шатуна АВ, совершающего плоское движение, известны. На пересечении перпендикуляров к векторам VA и VB находится МЦС, который совпадает с точкой С.
Так как модули скоростей различных точек фигуры пропорциональны расстояниям, то можно написать

откуда vB = vA - 0,462 = 4,55 - 0,462 = 2,1 м/с.
Задача 56. Кривошип ОА = r = 40 см кривошипно-шатунного механизма (рис. 91, а) вращается с угловой скоростью w = 25 рад/с. Длина шатуна, приводящего ползун В в возвратно-поступательное движение вдоль горизонтальных направляющих, равна АВ = l = 100 см. Определить скорость ползуна В в тот момент, когда кривошип ОА образует с горизонталью угол a = 30°.
Решение 1 – при помощи мгновенного центра скоростей (решение путем сложения переносной и относительной скоростей рекомендуется выполнить самостоятельно).
1.Изобразим на рис. 91, б расчетную схему. Схематично покажем кривошип ОА и шатун АВ в заданном положении. Ползун В, двигающийся поступательно, можно отождествить с точкой В.

Рис. 91
2. Замечаем, что кривошип совершает вращательное движение, ползун В движется поступательно, а шатун АВ совершает плоскопараллельное движение.
3. Скорость точки А направлена перпендикулярно к кривошипу ОА (по касательной к окружности, которую описывает точка А). Ее числовое значение
![]()
Скорость точки В направлена вдоль прямой ВО.
Проведем из точек А и В прямые, перпендикулярные к направлениям скоростей и Найдем в точке их пересечения С мгновенный центр скоростей шатуна.
4. Найдя положение мгновенного центра скоростей, получим

Отсюда
![]()
но предварительно нужно узнать значение отношения ![]() которое, как легко заметить, равно отношению синусов противолежащих углов (теорема синусов):
которое, как легко заметить, равно отношению синусов противолежащих углов (теорема синусов):
![]() .
.
5. Чтобы определить величину этого отношения, необходимо определить углы j1 и j2.
Замечая, что (см. рис. 87, б) j2 = 90° - b, найдем угол b, применив теорему синусов к D OBA:
![]()
откуда
![]()
Следовательно,
![]()
Из того же рис. 91, б видно, что угол j1 является одним из внешних углов D ОBА, поэтому
![]()
6. Теперь можно определить числовое значение скорости ползуна В:
![]()
Решение 2 – графическим методом.
1. Построим в масштабе m1 = 2,22 см/мм схему кривошипно-шатунного механизма в заданном положении (рис. 92).
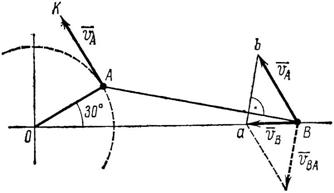
Рис. 92
2. Скорость VA = 10 м/сек точки А изобразим отрезком АК = 18 мм. Значит, масштаб скоростей
![]()
3. Из точки В построим вектор (вектор Вb равен вектору и параллелен отрезку AK). Из точки b построим до пересечения с линией ВО (направлением скорости ![]() ) отрезок bа, перпендикулярный к ВА. Получившийся на линии ВО вектор изображает искомую скорость
) отрезок bа, перпендикулярный к ВА. Получившийся на линии ВО вектор изображает искомую скорость
4. Измерив длину отрезка Ва, найдем, что Ва = 12 мм. Следовательно, числовое значение скоростей точки В
![]()
5. Как видно, между результатом, вычисленным при помощи мгновенного центра скоростей (6,75), и результатом, найденным при графическом решении (6,66), имеется расхождение, равное 0,09 (абсолютная ошибка). Следовательно, относительная ошибка, допущенная в графическом решении, составляет
![]()
Задача 57. Колесо катится без скольжения по горизонтальной плоскости, причем ось колеса перемещается равномерно со скоростью V0 = 5 м/с. Определить абсолютную скорость точки А на ободе колеса и точки В, находящейся на том же радиусе, в момент, когда радиус колеса, равный ОА = r = 40 см, образует с вертикалью угол a = 60° (рис. 93). Расстояние OB = 15 см.
Решение 1 – при помощи мгновенного центра скоростей.
1. Колесо катится без скольжения, следовательно, точка С соприкосновения колеса с горизонтальной плоскостью является мгновенным центром скоростей, так как абсолютная скорость этой точки VC = 0. Если принять точку С за полюс, то можно считать, что в данный момент колесо совершает вращение вокруг так называемой мгновенной оси, перпендикулярной к плоскости колеса и проходящей через точку С (мгновенный центр скоростей).
2. Определяем угловую скорость колеса:
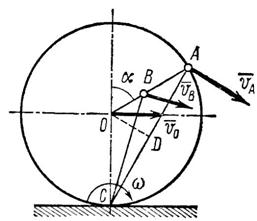
Рис. 93
3. Определяем абсолютную скорость точки А. Скорость направлена перпендикулярно к прямой АС, соединяющей точку А с мгновенным центром скоростей С,

но
![]()
Следовательно,

4. Определяем абсолютную скорость точки В. Скорость направлена перпендикулярно к прямой СВ и численно равна

но
и, следовательно, ![]() = 12,5×0,493 = 6,17 м/с.
= 12,5×0,493 = 6,17 м/с.
Решение 2 – при помощи сложения переносной и относительной скоростей.
1. Катящееся колесо совершает сложное движение, складывающееся из поступательного движения колеса вместе с осью О (переносного движения) и вращения колеса вокруг оси О (относительного движения).
2. Абсолютная скорость точки А при таком рассмотрении движения колеса равна диагонали параллелограмма ACDE, построенного на переносной и относительной скоростях точки А (рис. 94).
3. Переносная скорость точки А равна скорости оси колеса.
Найдем относительную скорость VАО точки А; VAO = w × AO. Но угловая скорость относительного вращательного движения, как известно, не зависит от выбора полюса, поэтому, приняв за полюс точку С, найдем, что  Следовательно,
Следовательно,
 (так как СО = АО – радиус колеса).
(так как СО = АО – радиус колеса).
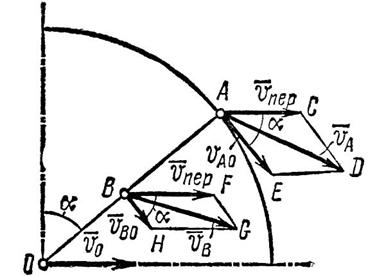
Рис. 94
Таким образом, для точки, расположенной на ободе катящегося без скольжения колеса,
![]()
Следовательно, параллелограмм ACDE есть ромб с углом САЕ = a = 60°, поэтому
![]()
4. Абсолютная скорость точки В равна диагонали параллелограмма BFGH, построенного на переносной скорости и на относительной скорости , и ее числовое значение можно определить по формуле
![]()
Но предварительно необходимо найти скорость VBO, которая определяется из соотношения
![]()
![]()
Окончательно
![]()
Задача 58. Две параллельные рейки (рис. 95, а) движутся в противоположные стороны с постоянными скоростями V1 = 8 м/с и V2 = 2 м/с. Между рейками зажат диск радиусом r = 0,5 м, катящийся по рейкам без скольжения.
Найти угловую скорость диска и скорость его центра.
Решение 1 – при помощи мгновенного центра скоростей.
1. В данном случае известны скорости реек. Но так как диск катится между ними без скольжения, точки А и В в местах соприкосновения диска с рейками имеют те же скорости. Следовательно, и ![]() (рис 95, б). Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей.
(рис 95, б). Как видно, точки А и В лежат на прямой, перпендикулярной к направлениям этих скоростей.
Соединив концы D и Е векторов AD и BE, изображающих скорости и найдем на прямой АВ точку С – мгновенный центр скоростей диска.
2. Скорость иа центра диска определяется по формуле

где w – угловая скорость диска.
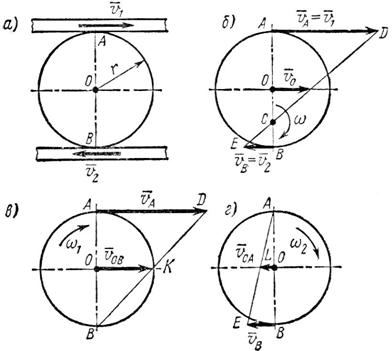
Рис. 95
3. Величины угловой скорости w и расстояния ОС находим из равенств

Так как левые части обоих равенств равны между собой, то
отсюда
![]()
и
![]()
4. Находим скорость V0:
![]()
Решение 2 – методом последовательной остановки реек.
1. Плоское движение диска образуется вследствие независимого друг от друга перемещения реек. Поэтому скорость центра диска можно получить как результат геометрического сложения скоростей, получаемых точкой О от перемещения каждой рейки.
2. Мысленно остановим нижнюю рейку (рис. 95, в). Тогда благодаря передвижению верхней рейки диск будет катиться по нижней без скольжения и в точке В образуется мгновенный центр скоростей.
Соединим точку В с точкой D (концом вектора ![]() ) и получим треугольник BAD, в котором вектор изображает скорость центра диска при неподвижной нижней рейке.
) и получим треугольник BAD, в котором вектор изображает скорость центра диска при неподвижной нижней рейке.
Так как ОК – средняя линия треугольника BAD,
![]()
Угловая скорость диска в этом движении
![]()
3. Теперь мысленно остановим верхнюю рейку (рис. 95, г). Диск будет катиться без скольжения по верхней рейке, имея мгновенный центр скоростей в точке А.
Соединив точку А с концом Е вектора получим треугольник ABE, определяющий скорость центра диска при неподвижной верхней рейке.
И здесь OL – средняя линия треугольника ABE, поэтому
![]()
Угловая скорость диска в этом движении
![]()
4. При одновременном движении обеих реек скорость центра диска
![]()
так как обе скорости и направлены вдоль одной прямой, но в противоположные стороны.
5. Угловая скорость диска определяется как сумма угловых скоростей w1 и w2, найденных выше:
![]()
СОДЕРЖАНИЕ
Глава 1. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ.. 3
§ 1. Сложение двух сходящихся сил. 3
§ 2. Разложение силы на две сходящиеся составляющие. 6
§ 3. Сложение плоской системы сходящихся сил. Силовой многоугольник 11
§ 4. Проекция силы на ось. Проекция силы на две взаимно-перпендикулярные оси координат 20
§ 5. Условия равновесия плоской системы сходящихся сил. 24
Глава 2. ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНО
РАСПОЛОЖЕННЫХ СИЛ.. 26
§ 6. Момент силы относительно точки. 26
§ 7. Приведение системы сил к данной точке. 32
§ 8. Равнодействующая плоской системы сил. Теорема Вариньона
о моменте равнодействующей. 35
§ 9. Уравнения равновесия произвольной плоской системы сил. 40
§ 10. Виды опор балочных систем. 49
Определение опорных реакций. 49
Глава 3. ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ.. 55
§ 11. Пространственная система сходящихся сил. 55
§ 12. Момент силы относительно оси. 60
§ 13. Условия равновесия произвольной пространственной
системы сил. 64
Глава 4. КИНЕМАТИКА ТОЧКИ.. 74
§ 14. Основные положения кинематики. 74
§ 15. Способы задания движения точки. 75
§ 16. Скорость точки. 77
§ 17. Ускорение точки. 85
§ 18. Вращательное движение тела вокруг неподвижной оси. 89
§ 19. Частные случаи вращательного движения. 91
Глава 5. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ.. 99
§ 20. Абсолютное движение и его составляющие. 99
§ 21. Сложение скоростей и ускорений точки в сложном
движении. 99
Глава 6. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.. 110
§ 22. Плоскопараллельное движение тела. 110
§ 23. Определение скорости точки тела при плоскопараллельном движении 112
§ 24. Мгновенный центр скоростей. 114
Учебное издание
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Часть 1
Учебное пособие
редактор
Корректор
Компьютерная верстка
Лицензия на издательскую деятельность ИД № 000 от 01.01.2001
Подписано в печать 14.10.2003. Формат 60´84/16.
Бумага типографская. Печать офсетная. Усл. печ. л. 7,44. Уч.-изд. л. 7,2.
Тираж экз. Заказ
_____________________________________________________________
Издательство Владивостокского государственного университета
экономики и сервиса
Владивосток, ул. Гоголя, 41
Отпечатано в типографии ВГУЭС
Владивосток, ул. Державина, 57

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
