

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 56
3. Составим уравнения равновесия.
Для составления уравнений проекций на ось х воспользуемся рис. 56, б или 56, в:
 (1)
(1)
На ось у силы не проектируются, так как все они перпендикулярны к этой оси.
Для составления уравнений проекций на ось z воспользуемся рис. 56, а или 56, в:
 (2)
(2)
Для составления уравнения моментов относительно оси х воспользуемся рис. 56, а:
 (3)
(3)
Для составления уравнения моментов относительно оси у воспользуемся рис. 56, в:
 (4)
(4)
Для составления уравнения моментов относительно оси z воспользуемся рис. 56, б:
 (5)
(5)
4. Решаем полученные уравнения.
Из уравнения (5) находим (так как AB ¹ 0): ХB = 0.
Из уравнения (4)
 .
.
Так как АЕ = АС / 2, то  H.
H.
Из уравнения (3)
 H.
H.
Из уравнения (2)

(угол b = 15°, так как треугольник ACD равнобедренный). Из уравнения (1)

Таким образом, чтобы крышка находилась в равновесии приоткрытой под углом 60°, вес противовеса должен быть Q = Т = 103,5 H. При этом реакция шарнира А имеет две составляющие: горизонтальную ХА = 100 H и вертикальную ZA = 173,2 H, а реакция шарнира В направлена вертикально и равна ZB = 200 H.
Задача 31. На вал 1 ворота намотана веревка, удерживающая груз Q (рис. 57). Радиус колеса 2 ворота в четыре раза больше радиуса вала. Веревка, прикрепленная к ободу колеса и натягиваемая грузом силой Р = 80 H, сходит с колеса в точке F по касательной; радиус DF колеса образует с вертикалью угол a = 60°. Определить величину груза Q, при котором ворот остается в равновесии, а также реакции подшипников А и В, если общий вес вала и колеса G = 600 Н и приложен в точке С (АС=0,4 м).
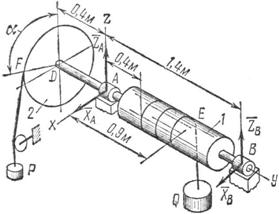
Рис. 57
Решение.
1. Три нагрузки – вес ![]() и грузы и приложенные к вороту, уравновешиваются реакциями подшипников А и В. Нагрузки действуют в плоскостях, перпендикулярных к оси вала, и, следовательно, не смещают вал вдоль оси, поэтому и реакции подшипников расположатся в плоскостях, перпендикулярных к этой же оси. Заменим их составляющими и
и грузы и приложенные к вороту, уравновешиваются реакциями подшипников А и В. Нагрузки действуют в плоскостях, перпендикулярных к оси вала, и, следовательно, не смещают вал вдоль оси, поэтому и реакции подшипников расположатся в плоскостях, перпендикулярных к этой же оси. Заменим их составляющими и ![]() (рис. 57). Следует учесть, что обычный подшипник не создает реакции, направленной вдоль оси вала. Если на вал действуют нагрузки, смещающие вал вдоль оси, то один из подшипников должен быть заменен подпятником.
(рис. 57). Следует учесть, что обычный подшипник не создает реакции, направленной вдоль оси вала. Если на вал действуют нагрузки, смещающие вал вдоль оси, то один из подшипников должен быть заменен подпятником.
2. Изобразим ворот со всеми действующими на него силами в трех проекциях (рис. 58 а, б, в) и при помощи их составим уравнения равновесия.
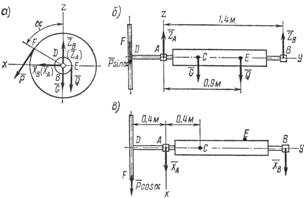
Рис. 58
Так же как и в предыдущей задаче, уравнение проекций на ось у превратится в тождество вида 0 = 0. При составлении уравнения моментов относительно оси у (уравнения (4)) нужно учитывать, что радиус колеса R в четыре раза больше радиуса вала r (R = 4r).
 (1)
(1)
 ; (2)
; (2)
 (3)
(3)
 ; (4)
; (4)
 (5)
(5)
3. Из уравнения (5)
 Н.
Н.
Из уравнения (4)
 Н.
Н.
Из уравнения (З)
Из уравнения (2)
 Н.
Н.
Из уравнения (1)
 Н.
Н.
Задача 32. На вале редуктора жестко укреплены два зубчатых колеса: коническое 1 и цилиндрическое 2 (рис. 59, а). Левая цапфа вала опирается на подшипник, воспринимающий только радиальную силу давления, действующую перпендикулярно к оси вала, а правая цапфа (пята) опирается на подпятник, т. е. на опору, способную, кроме радиальной силы давления, воспринимать и осевую (силу, действующую вдоль оси вала).
На колесо 1 действуют три силы: касательная P1 = 4 кH (окружное усилие); радиальная Q1 = l,28 кН и осевая S1 = 0,48 кН. Определить в положении равновесия силы Р2 и Q2 = 0,36 P2, приложенные к колесу 2, а также реакции опор А и В. Необходимые размеры (в мм) даны на рис. 55, а. Весом вала и колес пренебречь.
Решение.
1. Заданные и искомые силы, приложенные к колесам 1 и 2, приведем к точкам С1 и С2 на геометрической оси вала (рис. 59, б).
Сила Q1 = l,28 кН, действующая вдоль радиуса колеса, переносится в точку С1 непосредственно. Для приведения к точке C1 силы P1 = 4 кH, приложим к этой точке уравновешенную систему сил ![]() и
и ![]() и тогда, кроме приведенной силы
и тогда, кроме приведенной силы ![]() , образуется пара сил
, образуется пара сил  , отмеченная на рисунке одной черточкой (присоединенная пара сил). При переносе в точку С1 силы S1=0,48 кH аналогичным образом появляется пара
, отмеченная на рисунке одной черточкой (присоединенная пара сил). При переносе в точку С1 силы S1=0,48 кH аналогичным образом появляется пара  , отмеченная двумя черточками. Сила , действующая вдоль радиуса колеса 2, переносится в точку С2 непосредственно. При переносе в точку С2 силы
, отмеченная двумя черточками. Сила , действующая вдоль радиуса колеса 2, переносится в точку С2 непосредственно. При переносе в точку С2 силы ![]() образуется пара
образуется пара  , отмеченная на рисунке тремя черточками.
, отмеченная на рисунке тремя черточками.
2. Освободив вал в точках A и B от опор, заменяем действие опор их реакциями: подшипник А не препятствует горизонтальному смещению вала, поэтому его реакцию, расположенную в плоскости, перпендикулярной к оси вала, заменяем двумя составляющими: горизонтальной и вертикальной подпятник В препятствует смещению вала вдоль его оси, поэтому его реакцию заменяем тремя составляющими и (см. рис. 59, б).
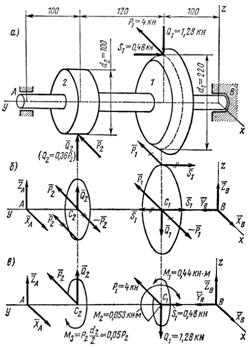
Рис. 59
3. Если силы выражать в кH, а плечи пар в м, то получим такие абсолютные числовые значения моментов М1 и М2:
 кН×м;
кН×м;
 кН×м;
кН×м;
а момент М3 выразится так:
 .
.
4. Составим шесть уравнений равновесия.
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
5. Решая эти уравнения последовательно, получим: из уравнения (5)
 кН.
кН.
Так как

 кН.
кН.
Из уравнения (6)
 кН.
кН.
Из уравнения (4)
Реакция ZА направлена не вверх, как на рис. 177, в, а вниз. Из уравнения (3)
 кН.
кН.
Из уравнения (2)  кН.
кН.
Из уравнения (1)  кН.
кН.
Глава 4. КИНЕМАТИКА ТОЧКИ
§ 14. Основные положения кинематики
Кинематика – это часть теоретической механики, которая занимается изучением законов механического движения твердых тел. Под механическим движением понимают перемещение тел в пространстве, совершаемое во времени. При изучении движения тел в кинематике не принимаются во внимание силы, действующие на тела, а также физические свойства самих тел.
О наличии движения и его характере можно судить по изменению положения данного тела по отношению к некоторой системе координат, которые чаще всего связывают с Землей как системой отсчета.
Известно, что при изучении некоторых случаев движения можно пренебречь размерами и формой тела, рассматривая его как материальную точку. Так, например, при поступательном движении все точки тела движутся одинаково, поэтому такое тело можно рассматривать как материальную точку, в которой сосредоточена вся масса тела.
В других случаях движения, например вращательном, все точки тела движутся по-разному. При этом твердое тело рассматривают как неизменяемую систему материальных точек. Поэтому кинематика делится на две части: кинематику точки и кинематику твердого тела.
Движение тела является заданным, если известно, как изменяется его положение в пространстве относительно выбранной системы координатных осей с течением времени.
Положение тела в пространстве в данный момент времени определяется его координатами, т. е. расстояниями от этих осей.
Для измерения расстояний в системе СИ принята основная единица – метр (м).
Для измерения времени принята основная единица – секунда (с).
Причем в кинематике различают такие понятия, как момент времени и промежуток времени.
Моментом времени t считают число секунд, определяющее данное мгновенье от некоторого, условно принятого начального момента (начала движения).
Промежутком времени называют разность между более поздним и ранним моментом времени. Например, автомобиль в некоторый момент времени t1 находился в пункте A, а позже, в момент t2, переместился в пункт В. Перемещение автомобиля из пункта А в пункт В произошло за промежуток времени D t = t2 – t1. Воображаемую линию, описываемую определенной точкой движущегося тела, называют траекторией движения. В зависимости от формы траектории движение может быть криволинейным или прямолинейным.
Величину, характеризующую быстроту и направление движения тела по траектории с течением времени, называют скоростью движения. Скорость – величина векторная.
В общем случае, если модуль и направление вектора скорости с течением времени изменяются, то движение является неравномерным и криволинейным. Если модуль и направление вектора скорости не изменяются с течением времени, то движение будет равномерным и прямолинейным.
Возможны и другие частные случаи движения, при которых переменны либо модуль, либо направление вектора скорости. За единицу модуля скорости принимают м/с. Быстроту изменения модуля и направления скорости по времени называют ускорением движения. Ускорение, как и скорость, является векторной величиной. Единицей измерения ускорения является м/с2.
§ 15. Способы задания движения точки
Движение точки можно задать двумя способами.
1. Координатный способ. Этот способ основан на том, что положение любой точки М в пространстве определяется тремя координатами относительно выбранной неподвижной системы трех взаимно перпендикулярных осей (рис. 60). При движении точки ее координаты являются функциями времени, т. е.

Данные уравнения называют уравнениями криволинейного движения точки в прямоугольных координатах. Если точка движется все время в одной плоскости, то уравнений будет только два:
x = f1(t); у = f1(t).
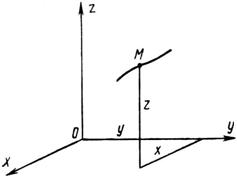
Рис. 60
Если же точка совершает прямолинейное движение, то, направив одну из осей, например ось х, по направлению движения точки, получим одно уравнение х = f (t), которое полностью определит это движение.
Задавшись системой координат и зная уравнения движения, можно определить положение движущейся точки в любой момент времени.
2. Естественный способ. Этот способ основан на том, что положение точки М на траектории (рис. 61) определяется длиной дуги траектории s = ÈОМ. Каждому положению точки М соответствует свое значение s, т. е.
s = f(t) (21)
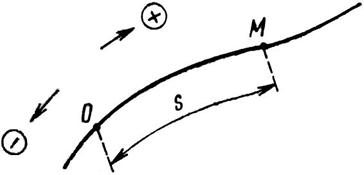
Рис. 61
Уравнение (21) выражает функциональную зависимость между расстоянием s точки от начала отсчета и временем движения. Его называют уравнением движения (законом движения) точки по данной траектории. Расстояние s, пройденное точкой от начала отсчета О, может быть положительным либо отрицательным в зависимости от направления движения точки. Таким образом, движение точки задано, если известны ее траектория и закон движения по этой траектории.
Следует различать два понятия: расстояние и путь, пройденный точкой. Если расстояние может быть как положительным, так и отрицательным, то путь, пройденный точкой, всегда является величиной положительной.
Действительно, пусть в некоторый момент времени t1 точка находится на траектории в положении М0 (рис. 62) на расстоянии S0 от начала отсчета 0. Двигаясь слева направо, точка в момент времени t2 оказалась в положении М1. Путь, пройденный точкой S, может быть определен как
S = S1 – S0.
Рис. 62
Таким образом, путь равен разности между конечным и начальным для рассматриваемого промежутка времени расстояниями. Очевидно, что при S0 = 0, S = S1, т. е. путь совпадает с расстоянием, если положение точки в начале рассматриваемого промежутка времени совпадало с принятым началом отсчета.
При изучении кинематики точки ограничимся только естественным способом задания движения. Начнем изучение с криволинейного движения, которое представляет собой общий случай движения.
§ 16. Скорость точки
Равномерное движение точки. Рассмотрим сначала равномерное движение точки М по траектории. Пусть в начале движения точка была в начале отсчета 0 и за t секунд прошла расстояние (путь) S. Равномерным движением называется такое движение, при котором отношение пройденного пути ко времени движения есть величина постоянная, т. е. S / t = const.
Это отношение называют скоростью равномерного движения точки. Модуль вектора скорости равен:
![]() (22)
(22)
Вектор скорости V направлен по касательной к траектории точки в сторону движения.
Из выражения (22) определим расстояние:
S = Vt (23)
и время движения:
![]() (24)
(24)
Данные уравнения являются основными формулами равномерного движения. Если в начале рассматриваемого промежутка времени точка находилась не в начале отсчета, а на некотором расстоянии S0 от него, то формула (23) примет вид
S = S0 + Vt,
где S0 – начальное расстояние; S – расстояние точки М от начала отсчета.
Задача 33. Из двух пунктов А и В прямолинейного шоссе, находящихся один от другого на расстоянии 100 км, одновременно выезжают навстречу друг другу два велосипедиста и двигаются с постоянными скоростями. Велосипедист, выезжающий из А, имеет скорость vА = 40 км/ч, а велосипедист, выезжающий из В – скорость VВ = 262/3 км/ч.
Определить, за какое время каждый из них проедет расстояние 100 км. Через сколько часов и где они встретятся?
Решение.
1. Находим время, затраченное первым велосипедистом на проезд от точки A до В:
 ч.
ч.
2. Находим время, затраченное вторым велосипедистом на проезд от точки В до А:
 ч.
ч.
3. Время и место встречи велосипедистов наиболее просто определить графически. Расстояние между пунктами А и В, равное 100 км, изобразим на оси ординат отрезком в 50 мм (рис. 63), т. е. в масштабе ms= 2 км/мм
 .
.
По оси абсцисс отложим время в масштабе mt = 0,1 ч/мм (4 часа изображены отрезком 40 мм, поэтому 4 ч = m × 40 мм и  ).
).
Первый велосипедист расстояние от А до В проезжает за 2,5 ч. Его перемещение изображается на графике прямой ОВ1.
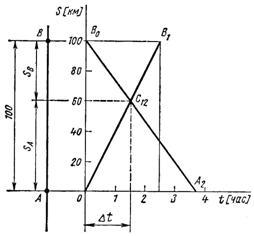
Рис. 63
Второй велосипедист расстояние от B до A проезжает за 33/4 ч и его перемещение изображается на графике прямой В0А2.
Точка С12 пересечения обоих графиков указывает место и время встречи. Встреча происходит на расстоянии SA = 60 км от пункта А (или на расстоянии SB = 40 км от пункта В) через D t = 1,5 ч после начала движения велосипедистов.
Если вместо графического решения применить аналитическое, то нужно рассуждать таким образом.
Допустим, что место встречи происходит на расстоянии s от пункта А, а время встречи D t, считая от начала движения. Тогда уравнение движения первого велосипедиста примет вид
 (1)
(1)
и уравнение движения второго велосипедиста

где s0 = 100 км – расстояние второго велосипедиста от пункта А в момент начала отсчета (при t = 0).
Так как левые части уравнения (1) и (2) равны, то

Отсюда

Из уравнения (1) определяем S:

Задача 34. Определить, с какими скоростями движутся точки А, В и С, расположенные на концах секундной, минутной и часовой стрелок часов. Принять длину секундной и минутной стрелок, равную 14 мм, и длину часовой стрелки – 10 мм (рис. 64).
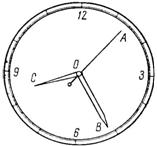
Рис. 64
Решение.
1. Скорости данных точек найдем из формулы

2. Определим исходные данные.
Для точки А (конец секундной стрелки)
ОА = тA = 14 мм; ТА = 1 мин = 60 с.
Для точки В (конец минутной стрелки)
0В = rB = 14 мм; ТB = 1 ч = 3600 с.
Для точки С (конец часовой стрелки)
ОС = rC = 10 мм; ТC = 12ч =с.
3. Находим искомые скорости:

Неравномерное движение точки. При неравномерном движении скорость точки непрерывно изменяется с течением времени, т. е. V = f(t).
Пусть точка, закон движения которой задан функцией s = f(t), движется из положения М0 (рис. 65) в положение М1 неравномерно в течение промежутка времени t = t1 – t0. Тогда отношение ![]() представляет собой среднюю скорость движения за данный промежуток времени. Но средняя скорость не дает представления о быстроте движения в каждый момент времени. Поэтому, кроме средней приходится определять мгновенную скорость, или скорость в данный момент.
представляет собой среднюю скорость движения за данный промежуток времени. Но средняя скорость не дает представления о быстроте движения в каждый момент времени. Поэтому, кроме средней приходится определять мгновенную скорость, или скорость в данный момент.
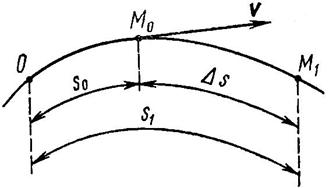
Рис. 65
Чем меньше промежуток времени D t, тем ближе средняя скорость приближается к мгновенной. В пределе, когда D t®0, – средняя скорость примет значение истинной скорости в данный момент времени:
 (25)
(25)
т. е. модуль мгновенной скорости равен первой производной от пути по времени. Вектор скорости точки направлен по касательной к траектории движения в данной точке и направлен в сторону движения.
В частном случае, если траектория движения представляет собой прямую линию, вектор скорости направлен вдоль этой прямой в сторону движения. Модуль мгновенной скорости в этом случае определяется так же: ![]()
Задача 35. Точка обода маховика движется по закону S = 1,5t2, где s – в м, t – в с. Определить скорость точки в момент времени t = 10 с и среднюю скорость за 10 с.
Решение.
1. Мгновенную скорость точки при t = 10 с найдем, продифференцировав уравнение движения:
 м/с,
м/с,
откуда для t = 10 с V = 30 м/с.
2. Среднюю скорость найдем по формуле
 м/с.
м/с.
Задача 36. Шарик, размерами которого можно пренебречь, начинает скатываться по наклонной плоскости из состояния покоя. Через 20 с после начала движения шарик находится от исходного положения на расстоянии 6 м.
Определить ускорение шарика и его скорость в конце 10-й и 20-й с, а также расстояние, пройденное шариком за первые 10 с.
Решение.
1. Из условия задачи следует, что S0 = 0 и V0= 0. Пройденное за t2 = 20 с расстояние S20 = 6 м. Даны четыре величины. Требуется определить ускорение шарика (движение прямолинейное, значит определить нужно только at), скорости V10, V20 и расстояние s10.
2. Найдем скорость шарика, которую он приобретает в конце 20-й с:
3. Найдем ускорение шарика, которое он имеет, двигаясь по наклонной плоскости:
4. Теперь можно найти скорость в конце 10-й с (t1 = 10 с):
V10 = a1 × t1 = 0,03×10 = 0,3 м/с.
5. Находим расстояние, пройденное точкой за первые 10 с:
Задачу можно решить в ином порядке. Сначала определить ускорение
![]()
Затем определить V10 и V20 и, наконец, найти s10.
Задача 37. Автомобиль, движущийся равномерно и прямолинейно co скоростью 60 км/ч, увеличивает в течение 20 с скорость до 90 км/ч. Определить, какое ускорение получит автомобиль и какое расстояние он проедет за это время, считая движение равноускоренным.
Решение.
1. Здесь также четыре данных величины:

V20 = 90 км/ч = 25 м/с, t0-20 = 20 с и s0 = 0,
так как движение автомобиля рассматривается только на том участке траектории (дороги), где он движется с ускорением.
2. Полагая, что в начальный момент времени S0= 0, найдем S0-20:
![]() м.
м.
3. Из формулы (2) найдем ускорение, полученное автомобилем:
 м/с2.
м/с2.
Задача 38. Имея скорость 20 м/с, автомобиль въезжает на криволинейный участок дороги, имеющий радиус закругления 200 м.
За 40 с равнопеременного движения он проезжает расстояние 400 м.
Определить, с каким касательным ускорением движется автомобиль, какова его скорость в конце пройденных 400 м и каково полное ускорение на середине этого пути.
Решение.
1. Изобразим участок дороги, по которой движется автомобиль (рис. 66): О – начало участка, В – конец участка и А – его середина.
Для равнопеременного движения в задаче имеется четыре основных данных: S0 = 0 (так как за начало отсчета движения принимаем точку О); V0 = 20 м/с; t0B = 40 с и S0B = 400 м; кроме того, известен радиус закругления 01A = r = 200 м.
2. Найдем скорость vB в конце участка дороги длиной S0B = 400 м (полагая, что S0 = 0):

Рис. 66
В конце рассматриваемого участка автомобиль останавливается, значит, движение равнозамедленное.
3. Найдем касательное ускорение автомобиля:
Получившееся отрицательное значение ускорения – подтверждение того, что движение автомобиля равнозамедленное.
4. Для того чтобы определить полное ускорение автомобиля в середине А участка 0В, нужно сначала найти скорость vA – скорость автомобиля в момент прохождения им точки А.
Эту скорость найдем, приняв S0 = 0 и S = S0A = 200 м:

5. Находим нормальное ускорение автомобиля в точке А:
6. И, наконец, находим полное ускорение автомобиля:

7. Вектор полного ускорения направлен к вектору скорости под углом  Угол a можно найти при помощи его синуса:
Угол a можно найти при помощи его синуса:

Следовательно,
угол 
§ 17. Ускорение точки
Как уже указывалось, при неравномерном движении скорость точки непрерывно изменяется с течением времени. При различных видах движения это изменение происходит по-разному. Направление вектора скорости при этом может оставаться постоянным или изменяться.
Векторную величину, характеризующую быстроту изменения модуля и направления скорости, называют ускорением точки.
1. Рассмотрим сначала, как определяется ускорение точки, совершающей прямолинейное движение.
Пусть в данный момент времени t1 точка имеет скорость V1, а через D t с, т. е. в момент t2 = t1 + D t, скорость ее будет V2. Изменение модуля скорости за данный промежуток времени составит D V = V2 - V1. Отношение изменения модуля скорости ко времени, в течение которого это изменение произошло, называют средним ускорением точки:
При неограниченном уменьшении промежутка времени (D t ® 0) среднее ускорение будет приближаться к пределу, который представляет собой истинное (мгновенное) ускорение точки. Истинное ускорение
 но
но  т. е.
т. е.
![]() (26)
(26)
Таким образом, модуль ускорения точки в прямолинейном движении равен первой производной от скорости по времени.
Направление вектора ускорения а совпадает с направлением вектора изменения скорости DV, т. е. при ускоренном движении совпадает с направлением движения, а при замедленном – противоположно ему.
2. Рассмотрим теперь движение точки по криволинейной траектории. Пусть за время D t точка переместится из положения М1 (рис. 67) в положение М2 и скорость ее при этом изменится от V1 до V2. Из рис. 67 видно, что скорость ее при этом изменяется как по величине, так и по направлению. Геометрическую разность скоростей найдем, построив векторы V1 и V2 из одной точки М1 и параллелограмма М2КСЕ. Очевидно, что вектор M1E = DV есть геометрическая разность скоростей V2 и V1, т. е. D V = V2 – V1.
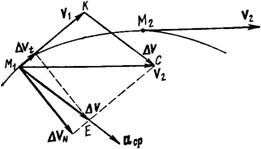
Рис. 67
Поделив вектор изменения скорости D V на промежуток времени D t, получим вектор среднего ускорения ![]() Если предположить, что промежуток времени D t безгранично мал, то можно считать, что вектор аср совпадет с вектором мгновенного ускорения а. Важно отметить, что в данном случае направление ускорения не совпадает с направлением вектора скорости точки, как в случае прямолинейного движения, а совпадает с направлением вектора изменения скорости DV.
Если предположить, что промежуток времени D t безгранично мал, то можно считать, что вектор аср совпадет с вектором мгновенного ускорения а. Важно отметить, что в данном случае направление ускорения не совпадает с направлением вектора скорости точки, как в случае прямолинейного движения, а совпадает с направлением вектора изменения скорости DV.
Разложим вектор DV на две составляющие, одну из которых DVt направим по скорости Vl, т. е. по касательной к траектории в точке M1, а другую DVN перпендикулярно к скорости V1, т. е. по нормали к траектории в данной точке.
Очевидно, что

Поделив каждый член последнего уравнения на промежуток времени D t, получим выражение
которое согласно определению среднего ускорения можно записать так:

Отсюда следует, что вектор среднего ускорения также можно представить в виде двух составляющих: – аср и aсрN. При неограниченном уменьшении промежутка времени D t в пределе, при D t ® 0, эти составляющие среднего ускорения стремятся к соответствующим составляющим мгновенного ускорения:
 (27)
(27)
Составляющая а направлена по касательной к траектории в данный момент времени и ее называют касательным ускорением.
Касательное ускорение характеризует изменение только модуля скорости и равно первой производной от скорости по времени. Составляющая aN направлена по нормали к траектории в данный момент времени и её называют нормальным ускорением. Оно всегда направлено внутрь вогнутости к траектории к центру кривизны, поэтому его иногда называют центростремительным ускорением.
Нормальное ускорение характеризует изменение направления, скорости точки. Модуль вектора нормального ускорения равен отношению квадрата скорости к радиусу кривизны траектории:
 (28)
(28)
Полное ускорение точки в каждый момент времени является геометрической суммой касательного и нормального ускорений.
На рис. 68 показаны направления полного, нормального и касательного ускорения в случаях ускоренного (рис. 68, а) и замедленного (рис. 68, б) движения. Нетрудно установить соотношения между величинами ускорений:
 (29)
(29)
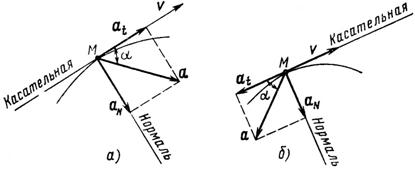
Рис. 68
Криволинейное неравномерное движение точки, при котором полное ускорение представляет собой геометрическую сумму касательного и нормального ускорений, является общим случаем движения. Рассмотрим некоторые частные случаи.
Прямолинейное неравномерное движение. Радиус кривизны прямой r = ¥, значит, ![]() Полное ускорение точки
Полное ускорение точки

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
