


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() ,
,
![]()
По формулам (4), (5), (6), (7), (8) PCC.КР1554ИР22 - мощность потребления регистра КР1554ИР22:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
По формулам (4), (5), (6), (7), (8) PCC.КР1554ЛН1 - мощность потребления элемента КР1554ЛН1:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
Мощность потребления резисторов:
![]() ,
,
![]()
Мощность потребления транзистора:
![]() .
.
Мощность потребления широкополосной динамической головки:
![]() .
.
По формуле (11) результирующая мощность потребления для модуля INDU:
![]()
![]() .
.
6. Модуль CPAN. Содержит следующие блоки: регистр на микросхеме КР1554ИР22, элемент КР1554ЛН1, элемент КР1554ЛИ6, дешифратор КР1554ИД14. Расчет мощности для резисторов приведен выше. Следовательно, мощность потребления модуля CPAN есть сумма мощностей этих блоков:
![]() , (12)
, (12)
По формулам (4), (5), (6), (7), (8) PCC.КР1554ИР22 - мощность потребления регистра КР1554ИР22:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
По формулам (4), (5), (6), (7), (8) PCC.КР1554ЛН1 - мощность потребления элемента КР1554ЛН1:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
По формулам (4), (5), (6), (7), (8) PCC.КР1554ЛИ6 - мощность потребления элемента КР1554ЛИ6:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
По формулам (4), (5), (6), (7), (8) PCC.КР1554ИД14 - мощность потребления дешифратора столбцов КР1554ИД14:
![]() ,
,
![]() ,
,
![]()
![]()
![]() ,
,
![]() ,
,
![]()
Мощность потребления резисторов:
![]() ,
,
![]()
По формуле (12) результирующая мощность потребления для модуля CPAN:

![]()
Результирующая мощность для всей микропроцессорной системы:

![]()
1.11. Расчет аппаратных затрат
В состав микропроцессорной системы входят следующие микросхемы:
AT89S8252 1 корпус 44А;
КР580ВИ53 1 корпус 2120.24-3;
КР1554ИР22 4 корпуса 2140.20-8;
КР1554ИД7 1 корпус 238.16-1;
КР1554ЛН1 1 корпус 201.14-1;
КР1554ЛИ1 1 корпус 201.14-1;
M2764A-2F1 1 корпус FDIP28W;
DS1225AD 1 корпус 28-pin;
MAX309 1 корпус 16PDIP;
REF198 1 корпус 8PDIP;
КР1554АП4 1 корпус 2140.20-8;
MAX151 1 корпус 24PDIP;
AD5311 1 корпус 6SOT-23;
КР1554ИР40 1 корпус 2140.20-8;
АЛ102А 4 корпуса;
АЛС314А 3 корпуса;
КР1554ИД14 1 корпус 238.16-1;
КР1554ЛИ6 1 корпус 201.14-1.
Всего 26 корпусов. Также по заданию необходимо рассчитать число условных корпусов. За единицу сложности принимается один 16-выводный корпус. Корпус с 24 выводами принимается за 2 корпуса, 28 выводами – за 3, 40 или 48 – за 5 или 6. Итого 39,5 корпусов.
1.12. Расчет номиналов конденсаторов повышения помехоустойчивости
Для снижения уровня помех ставятся конденсаторы фильтров питания, емкость которых приводится в справочнике [8], из расчета:
- для низкочастотных помех 1 мкФ на одну микросхему;
- для высокочастотных помех 0.01…0.1мкФ на микросхему.
Конденсаторы для блокирования высокочастотных помех устанавливаются по всей площади печатной платы равномерно относительно микросхем группы, конденсаторы для блокирования низкочастотных помех устанавливаются как можно ближе к контактам разъемов.
Поэтому в цепи питания устанавливается 26 керамических конденсаторов С14, …, С39 емкостью 0.1 мкФ типа К10-17-0.1 мкФ ± 20% и 2 электролитических конденсатора С40, С41 емкостью 22 мкФ типа К мкФ ± 20% из расчета один конденсатор на группу из 13 микросхем.
Так же необходим электролитический конденсатор К мкФ.
2. Разработка программных средств
2.1. Схема алгоритма управления объектом
Схема алгоритма управления объектом, реализованная в МПС, представлена на рис. 13.
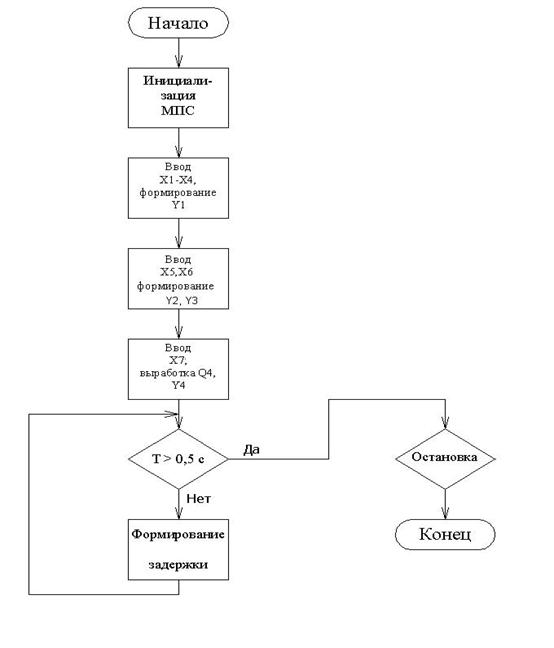
Рис. 13. Схема алгоритма управления объектом
2.2. Инициализация МПС
Для работы микропроцессорной системы необходимо произвести инициализацию. Алгоритм инициализации должен запускаться при старте микропроцессорной системы, и только после этого МПС готова к выполнению своих функций. Инициализация микроконтроллера АТ89S8252 производится в процедуре INIT. В процессе инициализации необходимо занести управляющие слова в определенные регистры микроконтроллера.
Для начала проинициализируем таймер WatchDog (встроенный сторожевой таймер). Для этого необходимо занести в регистр управления сторожевого таймера WCON управляющее слово, которое разрешит его работу и задаст время реакции 16 мс, т. е. если МПС не отвечает на команды в течении 16 мс, то таймер автоматически сбрасывает микроконтроллер. Также мы настраиваем встроенные таймеры 0, 1 и 2: таймер 0 на работу в режиме 1 (16-разрядный таймер), таймер 1 на работу в режиме 2 (перезагружаемый 8-разрядный счетчик), в таймер 2 загружаем значение для счета 100 мс, этот таймер будет перезагружаться, таким образом мы сможем отсчитать 0.5 с.
2.3. Логическая обработка сигналов Х1, Х2, Х3, Х4 и формирование управляющего сигнала Y1
Реализация алгоритма чтения управляющих воздействий и вычисление функции находится в процедуре ENTER_X1234, где реализуется ввод двоичных сигналов Х1, Х2, Х3, Х4 и вычисление функции Q1=Х1∙(Х4+Х2∙Х3) , а также если Q1=1, то формируется сигнал Y1 высокого уровня длительностью 100 мс программным способом.
2.4. Ввод напряжений Х5, Х6 и формирование сигналов Y2, Y3
Алгоритм реализован в подпрограмме ENTER_X56. Аналоговые напряжения Х5, Х6 преобразуются с помощью АЦП в цифровые сигналы N5, N6. С выхода АЦП эти цифровые сигналы подаются на обработку в микроконтроллер по шине данных, и вычисляется функция  . Эта функция вычисляется N=10 раз, а в качестве результата берется среднее арифметическое значение. Далее Q2 сравнивается с хранящейся в ПЗУ константой Q0=(2n -1)/2=511.5, где n=10 – разрядность АЦП. Если Q2<Q0, то вырабатывается сигнал Y2 длительностью 30 мс, иначе вырабатывается пачка сигналов Y3 с периодом 1 мс и скважностью 2 длительностью 60 мс.
. Эта функция вычисляется N=10 раз, а в качестве результата берется среднее арифметическое значение. Далее Q2 сравнивается с хранящейся в ПЗУ константой Q0=(2n -1)/2=511.5, где n=10 – разрядность АЦП. Если Q2<Q0, то вырабатывается сигнал Y2 длительностью 30 мс, иначе вырабатывается пачка сигналов Y3 с периодом 1 мс и скважностью 2 длительностью 60 мс.
Сигнал с АЦП принимается в параллельном коде, ввод в АЦП производится с выхода аналогового мультиплексора сначала с первого канала, затем со второго. Сигнал BUSY показывает готовность АЦП выдать информацию.
По меткам MAKE_Y2 и MAKE_Y3 формируется сигналы Y2 и Y3. Формирование производится с помощью внешнего таймера КР580ВИ53. На него подаются синхроимпульсы с вывода микроконтроллера Р3.4, которые формируются программно с помощью встроенного таймера 1. При этом сигнал Y2 – сигнал длительностью 30 мс, Y3 – пачка импульсов длительностью 60 мс и скважностью 2, периодом 1мс.
2.5. Ввод напряжения Х7 и формирование сигнала Y4
Алгоритм реализован в подпрограмме ENTER_X7. Аналоговое напряжение Х7 преобразуется с помощью АЦП в цифровую форму N7, затем вычисляется функция Q4 =A0+N7/A1, где А0=0024/LSB, А1=4. Значение Q4 выводится на индикаторы, далее с помощью ЦАП по интерфейсу I2C преобразуется в напряжение Y4.
2.6. Обработка сигналов прерывания
В подпрограмме INT1_DAT реализована обработка прерывания от аварийного датчика. Она выводит значения Х1, …, Х4 на светодиоды, выводит значение Q4 на индикаторы и управляет звуковой сигнализацией с частотой 500 Гц. Выход из подпрограммы возможен только по кнопке СБРОС.
В подпрограмме INT2_P реализована обработка прерывания от источника питания. В ней все регистры микропроцессора (R0, …, R7, ACC, SFR) переписываются в энергонезависимое ОЗУ.
В подпрограмме INT3_K реализована обработка прерывания от клавиатуры, сигнал прерывания формируется при нажатии одной из трех командных клавиш ПУСК, МЕНЮ, ВВОД. При нажатии кнопки МЕНЮ будет производиться вывод номера исполняемой функции в данный момент, повторное нажатие кнопки МЕНЮ будет приводить к перебору функций МПС. Переход к выполнению функции будет осуществляться нажатием кнопки ПУСК. Если вначале нажать кнопку ПУСК без выбора функций, то запустится цикл вычисления функций. При нажатии на кнопку ВВОД, можно изменить код уставки К, хранящийся в ОЗУ.
В подпрограмме INT_SV реализован вывод на светодиодную индикацию нужного значения. Для этого используется таймер 0 в режиме 1, от которого вырабатывается прерывание по переполнению.
В подпрограмме INT_SCL реализована выработка синхросигнала, необходимого для таймера/счетчика КР580ВИ53, на основе обработки прерывания по переполнению от таймера 1 в режиме 2 (перезапускаемый 8-разрядный счетчик).
В подпрограмме INT_UPR реализована обработка прерывания от таймера 2. Таймер 2 считает 0.5 секунд – требуемое время цикла управления.
2.7. Оценка времени работы программного модуля
Для оценки времени работы модуля необходимо знать время одного машинного цикла:
TCY = TCLK⋅12 =
Также необходимо знать количество команд, которое будут выполнятся при единичном проходе программы. Но у разных команд может быть разное время выполнения, а для всей программы точный подсчет займет слишком много времени. Поэтому время считается для приблизительного количества команд и считается, что все команды исполняются одинаковое время (2 машинных цикла). В итоге расчет делается для 630 команд. И тогда время выполнения примерно составит:
T = 4 мкс⋅630 = 2520 мкс = 2.52 мс.
ЗАКЛЮЧЕНИЕ
В результате проектирования была создана микропроцессорная система для управления объектом.
Основные характеристики:
- Используется микроконтроллер AT89S8252;
- В МПС имеется память двух типов: ПЗУ емкостью 8 Кбайт и ОЗУ емкостью 8 Кбайт;
- Для ввода используется клавиатура, состоящая из 25 клавиш;
- Для вывода используются светодиодные индикаторы, кроме того, имеется звуковая аварийная сигнализация;
- МПС принимает информацию в виде 3 аналоговых и 6 двоичных сигналов, из которых 2 являются сигналами от датчиков аварийных ситуаций;
- МПС выдает информацию в виде 1 аналогового и 3 двоичных сигналов.
Возможно расширение управляющих алгоритмов МПС. Также имеются возможности по расширению аппаратной конфигурации: в системе остался один незадействованный аналоговый вход, шесть клавиш, не имеющих функциональной нагрузки.
Основными результатами проектирования являются принципиальная электрическая схема МПС и программа, реализующая управляющие алгоритмы МПС.
Список используемой литературы
1. Однокристалльные микроЭВМ. М.: МИКАП, 1994. – 400 с.
2. Веб-сайт WWW.ALLDATASHEET.COM [www.alldatasheet.com].
- официальная документация по микросхеме AT89S8252;
- официальная документация по микросхеме MAX151;
- официальная документация по микросхеме MAX309;
- официальная документация по микросхеме M2764-2F1;
- официальная документация по микросхеме DS1225AB.
3. Официальный веб-сайт компании Analog Devices [www. analog.com].
- описание микросхемы AD5311.
4. Веб-сайт «Рынок микроэлектроники» [www. *****].
- поиск по сайту. Микросхема РК169МВ–6АП – 6 МГц.
5. Логические ИС КР1533, КР1554. Справочник. В 2 т. / , , . – ТОО "Бином", 1993. – 499 с.
6. Элементы схем бытовой радиоаппаратуры. Конденсаторы. Резисторы: Справочник. – М.: Радио и связь. 1995. – 272 с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
