
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531.383-11:681.7
, ГАЛИЕВА Н. Г.
(ОАО «Концерн «ЦНИИ «Электроприбор», Университет ИТМО, Санкт-Петербург)
( «ЦНИИ «Электроприбор», Санкт-Петербург)
Модель погрешностей
волоконно-оптического гироскопа.
В работе предложена модель погрешностей волоконно-оптического гироскопа, учитывающая структуру шумов выходного сигнала, а также зависимость выходного сигнала от внешних воздействующих факторов. Проведено сравнение реальных выходных характеристик волоконно-оптических и математической модели, показана адекватность модели
Введение
Одним из важнейших аспектов проектирования бесплатформенных инерциальных навигационных систем (БИНС) является выработка требований к чувствительным элементам, в частности к датчикам угловой скорости. При проектировании БИНС, исходя из требований обеспечения заданного уровня точности в выработке параметров ориентации и навигации объекта, во многих случаях ограничиваются упрощенными моделями погрешностей чувствительных элементов, принимая их за квазипостоянные величины, не рассматривая динамику их изменения. На современном этапе одним из путей повышения уровня точности БИНС является детальное описание модели погрешностей чувствительных элементов и тщательный анализ влияния составляющих погрешностей чувствительных элементов на БИНС. Подробный анализ можно осуществить при имитационном моделировании БИНС.
Целью данной работы является построение математической модели погрешностей волоконно-оптического гироскопа, которая будет учитывать не только структуру шумов, но и зависимость выходного сигнала от воздействия внешних факторов, таких как температура и действующая угловая скорость.
В работе приведено сравнение реальных выходных характеристик волоконно-оптических гироскопов (ВОГ), производства «ЦНИИ «Электроприбор», и математической модели, построенной для этих же гироскопов, показана адекватность модели.
Математическая модель погрешностей ВОГ
Выходной сигнал ВОГ, как и любого другого датчика угловой скорости, можно описать следующей моделью:
 , (1)
, (1)
где ![]() – выходной сигнал триады ВОГ, который является функцией действующей угловой скорости
– выходной сигнал триады ВОГ, который является функцией действующей угловой скорости ![]() и температуры
и температуры ![]() ;
; ![]() – действующая угловая скорость;
– действующая угловая скорость;![]() – смещения нулевого сигнала триады ВОГ, величина которого зависит от температуры;
– смещения нулевого сигнала триады ВОГ, величина которого зависит от температуры; ![]() – масштабный коэффициент (МК) ВОГ, величина которого зависит не только от температуры, но и от входной угловой скорости;
– масштабный коэффициент (МК) ВОГ, величина которого зависит не только от температуры, но и от входной угловой скорости;![]() – белошумная составляющая выходного сигнала ВОГ.
– белошумная составляющая выходного сигнала ВОГ.
Из формулы (1) можно выразить действующую угловую скорость ![]() :
:
 . (2)
. (2)
Для удобства дальнейшего изложения величину ![]() обратную МК обозначим
обратную МК обозначим ![]() .
.
В новых обозначениях действующая угловая скорость будет иметь вид:
 . (3)
. (3)
В ходе калибровки определяются коэффициенты ![]() модели погрешностей (3). При этом эксперимент необходимо организовать таким образом, чтобы исключить влияние других внешних факторов на выходной сигнал.
модели погрешностей (3). При этом эксперимент необходимо организовать таким образом, чтобы исключить влияние других внешних факторов на выходной сигнал.
По найденным величинам восстанавливается действующая угловая скорость ![]()
 . (4)
. (4)
Здесь знак «^» обозначает, что эти величины вычислены в ходе калибровки.
Погрешность определения ![]() может быть получена как разность действующей
может быть получена как разность действующей ![]() и вычисленной
и вычисленной ![]() угловой скорости:
угловой скорости:
 . (5)
. (5)
Учитывая, что  , и пренебрегая величинами второго порядка малости, можно получить
, и пренебрегая величинами второго порядка малости, можно получить
 . (6)
. (6)
Вводя обозначения  приходим к модели аналогичной, приведенной в [1]
приходим к модели аналогичной, приведенной в [1]
 , (7)
, (7)
где ![]() – ошибка определения смещения нуля и его нестабильность в пуске;
– ошибка определения смещения нуля и его нестабильность в пуске; ![]() – погрешностью определения и нестабильность в пуске МК, которая вносит вклад пропорциональный измеряемой угловой скорости;
– погрешностью определения и нестабильность в пуске МК, которая вносит вклад пропорциональный измеряемой угловой скорости; ![]() – шумовая составляющая, характеризующей флуктуационные погрешности гироскопов.
– шумовая составляющая, характеризующей флуктуационные погрешности гироскопов.
В данной работе полагается, что нестабильность смещения нуля в пуске вызвана изменением температуры, а масштабного коэффициента еще к тому же величиной действующей угловой скорости, так как воздействие других внешних факторов не рассматривалось.
Идентификация структуры шумов с помощью вариаций Аллана
Структура и характер шумовых составляющих в канале измерения оказывают существенное влияние на достоверность оценки самой измеряемой величины. Классические методы исследования случайных процессов (выборочная дисперсия, спектральная плотность) не всегда позволяют идентифицировать источник погрешностей и их количественный вклад в общую статистику шума [2]. Для решения подобных задач рекомендуется использовать метод вариаций Аллана.
Вариации Аллана представляют собой метод представления среднеквадратического отклонения случайного смещения нуля гироскопа σА(τ) в зависимости от времени осреднения (τ).
Сущность метода вариации Аллана состоит в вычислении дисперсии разницы соседних отклонений.
Таблица 1
Вариации Аллана для различных процессов
Тип шума | Наклон на графике (дб/дек) | Параметр шума |
Шум квантования | -1 | Q |
Белый шум | -1/2 | N |
Фликкер-шум | - | B |
Случайное блуждание (винеровский процесс) | +1/2 | K |
Шум ухода (случайный наклон) | +1 | R |
Так как для инерциальных измерителей известны основные шумовые составляющие, приведенные в таблице 1, то можно представить вариацию Аллана посредством аппроксимирующего полинома в следующем виде:
![]() (8)
(8)
Рис.1. Типовые наклоны для среднеквадратических значений вариаций Аллана в логарифмических осях в зависимости от времени осреднения
Случайное блуждание по угловой скорости, фликкер-шум и шум ухода могут, как одновременно присутствовать в датчике, так и отсутствовать совсем. Это определяется с помощью анализа вариации Аллана.
Шумовую составляющую погрешности ВОГ рассмотрим как совокупность случайных процессов, состав которой будем определять с помощью анализа данных измерений, рассчитывая вариации Аллана.
Для определения структуры шумов ![]() выходного сигнала, ВОГ устанавливался на неподвижное основание, и выходные данные фиксировались в течение суток, после чего с использованием разработанной собственными средствами программы [3] строились вариации Аллана и рассчитывались коэффициенты полинома (8). На рисунке 2 приведены вариации Алана для выходного сигнала ВОГ, построенные для четырех суточных реализаций. По графику видно, что в каждой из реализаций присутствуют три наклона -1, -1/2 и 1/2. Коэффициенты полинома, характеризующие белый шум и шум квантования, всегда постоянны, а вот коэффициент, характеризующий случайное блуждание, отличается. Это вызвано тем, что во время испытаний температура окружающей среды изменялась по-разному, и можно сделать вывод, что эту составляющую стоит отнести к нестабильности смещения нуля, вызванной изменением температуры.
выходного сигнала, ВОГ устанавливался на неподвижное основание, и выходные данные фиксировались в течение суток, после чего с использованием разработанной собственными средствами программы [3] строились вариации Аллана и рассчитывались коэффициенты полинома (8). На рисунке 2 приведены вариации Алана для выходного сигнала ВОГ, построенные для четырех суточных реализаций. По графику видно, что в каждой из реализаций присутствуют три наклона -1, -1/2 и 1/2. Коэффициенты полинома, характеризующие белый шум и шум квантования, всегда постоянны, а вот коэффициент, характеризующий случайное блуждание, отличается. Это вызвано тем, что во время испытаний температура окружающей среды изменялась по-разному, и можно сделать вывод, что эту составляющую стоит отнести к нестабильности смещения нуля, вызванной изменением температуры.

Рис.2. Вариации Алана для выходного сигнала ВОГ
Зависимость коэффициентов модели погрешностей от температуры
Несмотря на то, что фирмы-производители постоянно улучшают технологии создания волоконно-оптических гироскопов, совершенствуя элементную базу, одним из главных факторов, ограничивающим точность ВОГ, является температурная нестабильность.
Температурную ошибку в выходном сигнале вызывают три фактора: сама величина температуры, скорость изменения температуры и температурный пространственный градиент. Температурный пространственный градиент и скорость изменения температуры оказывают значительно больший эффект на выходной сигнал ВОГ, построенного по схеме с обратной связью, чем просто абсолютное значение температуры [5].
Погрешность выходного сигнала ВОГ, вызванную температурой, можно разделить на две части: мультипликативную (погрешность масштабного коэффициента) и аддитивную (погрешность смещения нуля) [6].
Для исследования влияния температуры на погрешности смещения нуля и МК на волоконно-оптической катушке были размещены равномерно восемь датчиков температуры. ВОГ размещался на прецизионном трехосном поворотном стенде "Acutronic" AC3367 с термокамерой. В термокамере задавался температурный режим, обеспечивающий максимальное перекрытие значений температур и скоростей изменения температур в рассматриваемом диапазоне. Стендом задавалось сложное движение, включающее стоянки и вращения в различных положения, предназначенное для разделения зависимостей смещения н.
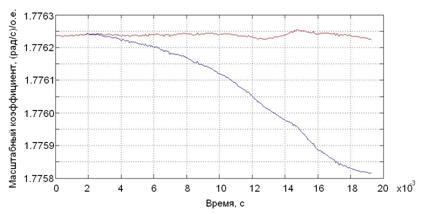
Рис.3 Зависимость МК от температуры
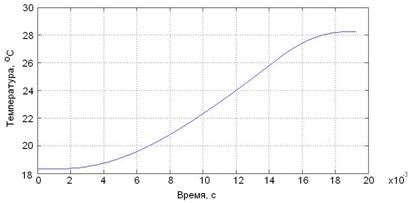
Рис.4 Изменение температуры
По полученным данным находилась корреляция МК и дрейфа нуля ВОГ с данными о величине температуры, скорости ее изменения, а также пространственному градиенту температуры и строились модели зависимости смещения нуля и МК следующего вида:
 ; (9)
; (9)
 ; (10)
; (10)
где ![]() – зависимость погрешности МК от температуры, описываемая полиномом третьего порядка;
– зависимость погрешности МК от температуры, описываемая полиномом третьего порядка;![]() – зависимость погрешности МК от скорости изменения температуры, описываемая полиномом первого порядка;
– зависимость погрешности МК от скорости изменения температуры, описываемая полиномом первого порядка; ![]() – зависимость погрешности смещения нуля от температуры, описываемая полиномом третьего порядка;
– зависимость погрешности смещения нуля от температуры, описываемая полиномом третьего порядка; ![]() – зависимость погрешности смещения нуля от скорости изменения температуры, описываемая полиномом первого порядка.
– зависимость погрешности смещения нуля от скорости изменения температуры, описываемая полиномом первого порядка.
Имитационная модель погрешностей ВОГ
Для создания имитационной модели погрешностей ВОГ была использована графическая среда моделирования Simulink.
На базе модели погрешностей (7) с учетом структуры шумов средствами Simulink была разработана имитационная модель погрешностей волоконно-оптического гироскопа, приведённая на рисунке 5.

Рис. 5 Имитационная модель погрешностей волоконно-оптического гироскопа
Разработанная модель погрешностей ВОГ включает в себя блок формирования действующей угловой скорости, блок формирования изменения температуры, передаточную функцию, характеризуемую постоянной времени прогрева прибора.
В блоке Scale Factor формируются значения масштабного коэффициента, в блоке Bias – смещения нуля выходного сигнала ВОГ. Входной информацией для обоих блоков служат значения температуры, производной по времени от температуры, а также коэффициентов, характеризующих зависимость масштабного коэффициента и смещения нуля от температуры, найденные в предыдущем пункте.
Шумовая составляющая представлена блоками, формирующими шум квантования, белый шум и случайное блуждание выходного сигнала. Параметры этих блоков были вычислены выше при помощи вариаций Аллана.
Случайный процесс формируется путем прохождения единичного белого шума через формирующий фильтр [4].
Шум квантования описывается следующим дифференциальным уравнением  , случайное блуждание по угловой скорости -
, случайное блуждание по угловой скорости - ![]() . Белый шум описывается как
. Белый шум описывается как  . Здесь
. Здесь ![]() единичный белый шум,
единичный белый шум,  – коэффициенты аппроксимирующего полинома (8).
– коэффициенты аппроксимирующего полинома (8).
Для проверки адекватности разработанной модели результаты имитационного моделирования сравнивались с сигналом реального гироскопа. По рисункам 6, 7 видно, что они совпадают с высокой точностью, из чего можно сделать вывод об адекватности разработанной модели погрешностей выходного сигнала ВОГ.
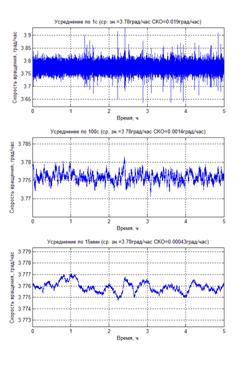

Рис. 6. Внешний вид выходного сигнала с различными интервалами осреднения: 1с, 100с, 15 мин. Слева –реальный, справа – промоделированный.
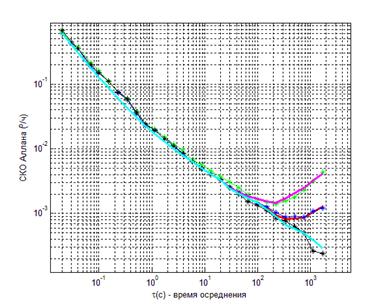
Рис 7. Вариации Алана для реального сигнала (обозначены тонкими линиями со звездочками) и модели (обозначены жирными линиями) для различных градиентов изменения температуры.
Выводы
1. Проведены исследования зависимости выходного сигнала ВОГ от температуры;
2. Проведены исследования шумовой составляющей выходного сигнала ВОГ при помощи вариаций Алана;
3. Описана модель погрешностей ВОГ;
4. Приведено сравнение реальных данных ВОГ и математической модели, построенной для этих же гироскопов, показана адекватность модели.
Литература
1. , Интегрированные системы ориентации и навигации для морских подвижных объектов. – СПб: ГНЦ РФ – ЦНИИ «Электроприбор», 2003. – 390 с.
2 , Некоторые практические вопросы использования вариации Аллана при исследовании бесплатформенного инерциального блока. Ракетно-космическая техника. Сер.11. Системы управления ракетных комплексов. - , 2013.- Вып.1.- С.55-64.
4 , Применение расширенного фильтра Калмана для калибровки инерциальных датчиков / Вiсник НТУУ «КПI». Серiя ПРИЛАДОБУДУВАННЯ. – 2012. – Вип. 43, с 10-17.
5 , , А. Влияние температурной нестабильности характеристик источника на показания волоконно-оптического гироскопа. Научно-технический вестник информационных технологий, механики и оптики. 2013. № 6(88). С. 31-35.
6 , Исследование зависимости выходного сигнала волоконно-оптического гироскопа от температуры в составе бескарданного инерциального измерительного модуля. // Навигация и управление движением: Материалы докладов XIV конференции молодых ученых «Навигация и управление движением». – СПб.: ГНЦ РФ «ЦНИИ «Электроприбор». 2012.
7 , , А. О калибровке погрешностей БИИМ на ВОГ в условиях стенда. Гироскопия и навигация, № 3, 2012. c. 55-63.
|
Задача управления устойчивостью гироскопических систем стабилизации
или автореферат диссертации на соискание ученой степени кандидата физико-математических наук специальности 05.13.01 – Системный анализ, управление, обработка информации Вычислительного центра им. Российской академии наук |
|
|
Гироскопы
- Гироскопы
- Гироскопические приборы наведения (ГН)
- О выборе гироскопических датчиков для системы подземной навигации
- Оценивание и учет ступенчатых изменений погрешностей построения инерциального трехгранника в инерциальной навигационной системе на неуправляемых гироскопах
- О возможности построения бескарданного гирокомпаса на основе электростатического гироскопа для малоподвижного основания
- Исследование зависимости степени сохранения поляризации в чувствительном элементе волоконно-оптического гироскопа от радиуса намотки волокна
- Результаты изготовления и отбраковочных испытаний микромеханических гироскопов
- О возможности построения бескарданного гирокомпаса на основе электростатического гироскопа для малоподвижного основания
- Исследование погрешностей бесплатформенного инерциального гирокомпаса на основе трех гироскопических измерителей угловой скорости и трех измерителей кажущегося ускорения. Автореферат
- Аппаратурное и методическое обеспечение испытаний роторного вибрационного гироскопа для вращающегося носителя. Автореферат
Понятие погрешности
- Погрешность вычислений ёмкости в программной среде Tor elcut
- Погрешности измерений
- Теория погрешностей Измерение физических величин
- Погрешность средств измерения
- Погрешности и условия применения импульсных методов определения теплофизических характеристик материалов
- Погрешности измерений физических величин
- Факторы, влияющие на погрешность изотопно-молекулярного анализа оксида азота
- Урок 2.2 Тема. Физические величины. Измерение физических величин. Точность и погрешность измерений
Проекты по теме:



 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)