
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная №4
Построение геометрической модели полумуфты
Цель: Используя инструменты геометрического моделирования ANSYS, построить модель полумуфты (используйте материал, приведенный ниже рисунков). Представить последовательность команд построения данных объектов. Привести объяснение каждой новой команды и ее параметров относительно моделируемого объекта. В выводах привести соображения относительно возможных вариантов создания моделей данных объектов.

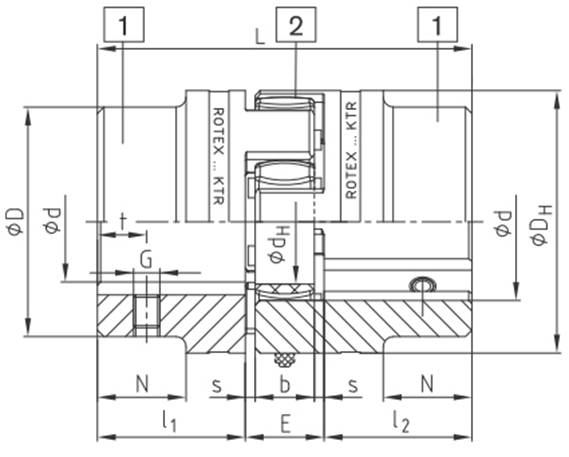
Кулачок:
d | L | l1;l2 | E | b | s | DH | dH | D | N | G | t |
40 | 114 | 45 | 24 | 18 | 3 | 80 | 38 | 70 | 27 | M8 | 15 |
Работа с системами координат и рабочей плоскостью
KWPLAN, WN, KORIG, KXAX, KPLAN
Определяет рабочую плоскость по трем точкам.
WN - Номер окна, в котором изменяется рабочая плоскость, по умолчанию 1.
KORIG - Номер точки, в которой будет начало координат рабочей плоскости, если KORIG = P, то выбирается графически, остальные параметры игнорируются и будут выбираться также графически.
KXAX - Точка, определяющая направление оси X новой рабочей плоскости
KPLAN - Точка, определяющая совместно с двумя предыдущими плоскость в глобальной системе координат
WPCSYS, WN, KCN
Определяет положение рабочей плоскости в системе координат.
WN - Номер окна, в котором изменяется рабочая плоскость, по умолчанию 1.
KCN - Номер системы координат, если задавалась ранее. По умолчанию активная система координат.
WPLANE, WN, XORIG, YORIG, ZORIG, XXAX, YXAX, ZXAX, XPLAN, YPLAN, ZPLAN Определяет рабочую плоскость выбором координат.
WN - Номер окна, в котором изменяется рабочая плоскость, по умолчанию 1.
XORIG, YORIG, ZORIG – Начало системы координат рабочей плоскости в координатах глобальной декартовой системы
XXAX, YXAX, ZXAX - координаты точки в глобальной декартовой системе, определяют, вместе с точкой начала, направление оси X/
XPLAN, YPLAN, ZPLAN - координаты точки в глобальной декартовой системе, определяют, вместе с двумя предыдущими точками, рабочую плоскость в пространстве
WPSTYL, SNAP, GRSPAC, GRMIN, GRMAX, WPTOL, WPCTYP, GRTYPE, WPVIS, SNAPANG
Определяет вид и стиль рабочей плоскости
SNAP – шаг координат для графического выбора (по умолчанию 0.05).
GRSPAC – графический шаг сетки координат
GRMIN, GRMAX – диапазон изменения шага сетки при масштабировании
WPTOL – не используем
WPCTYP - тип системы координат
0 | — | Декартова система координат |
1 | — | Полярная. Если эта система является основой для активной системы координат, то эта система становится цилиндрической |
2 | — | Полярная. Если эта система является основой для активной системы координат, то эта система становится сферической. |
GRTYPE – вид сетки
0 | — | Сетка и вектора системы координат |
1 | — | Только сетка |
2 | — | Только вектора системы координат (по умолчанию). |
WPVIS – видимость сетки
0 | — | Не показывать (по умолчанию). |
1 | — | Показывать |
SNAPANG - шаг угла (0-180) в градусах. Используется только если WPCTYP = 1 или 2. По умолчанию 5 градусов.
Пример: WPSTYL,,,,,,1,0,1,10 – Установить рабочую плоскость в полярную систему координат типа 1 с отображением координатной сетки и векторов системы координат, шаг сетки 10 градусов.
CSYS, KCN
Активировать ранее определенную систему координат.
KCN – Устанавливает активную систему координат как:
0 (по умолчанию) | — | Декартову |
1 | — | Цилиндрическую с направлением Z вдоль глобальной Z |
2 | — | Сферичискую |
4 or WP | — | На основе рабочей плоскости |
5 | — | Цилиндрическую с направлением Z вдоль глобальной Y |
11 or greater | — | Ранее заданная система координат |
Пример: CSYS,4 – устанавливает активную систему координат в соответствии с настройками рабочей плоскости.
