
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В п. 2.5 рассматриваются особенности системы компенсации переменного уровня ГМП на борту при околоземных полетах.
При околоземном полете вектор напряженности ГМП в корабле все время меняется, причем не только по величине, но и по направлению. Соответственно если компенсировать изменение каждого компонента ГМП, то потребуется двухкомпонентная или даже трехкомпонентная система компенсации, что технически не представляется осуществимым.
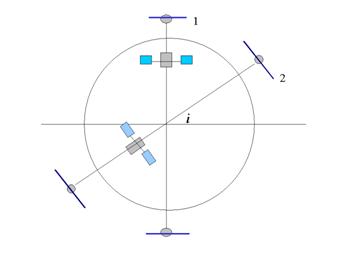
Рис. 4. Стабилизация магнитного поля на борту при движении по полярной орбите (1) и орбите с углом наклона i (2) .
Нами предлагается (Тrukhanov, Lugansky, 2006), по-видимому, наиболее простой и эффективный выход из положения. Он состоит в том, что внутри (или вне) обитаемого отсека устанавливается однокомпонентная магнитная система соленоидального типа, которая создает магнитное поле вдоль его оси. По показаниям магнитометра, находящегося в обитаемом отсеке и включенного в блок управления током источника, питающего магнитную систему, модуль поля, создаваемого совместно магнитной системой и ГМП на борту, поддерживается на заранее установленном уровне, который незначительно превышает тот максимальный уровень ГМП, который достигается на орбите.
Таким образом, при вариации уровня ГМП на борту вследствие тех или иных причин (изменения геомагнитных координат корабля из-за его движения по орбите или же процессов в магнитосфере) поле остается стабильным, а меняется, причем достаточно медленно, лишь направление его вектора. Медленные и даже сравнительно быстрые изменения направления вектора магнитного поля, по-видимому, не могут вызывать каких-либо нежелательных биологических эффектов у человека, поскольку естественным образом сопровождают его жизнедеятельность. Положение тела относительно вектора ГМП практически все время изменяется как при его движении в пространстве, так и при изменении позы.
Рассматривается, в качестве иллюстрации, как должна изменяться величина дополнительного поля Bart при движении по орбите (в реальности величина Bart будет управляться магнитометром). ГМП в первом приближении принято за поле магнитного диполя, ось которого совпадает с осью вращения Земли. Приведено решение задачи о том, как должно изменяться поле системы на полярной орбите при различной ориентации корабля относительно направления полета. В случае, если углы тангажа и рыскания корабля равны нулю, то отношение Bart к уровню ГМП на борту в плоскости экватора Beq:
 (2.1),
(2.1),
где φ – широта.
Из соображений минимальной мощности выбираем в перед 2·cosφ знак +. Показано также, что средняя мощность на поддержание модуля магнитного поля меньше половины мощности, требуемой на экваторе.
Рассматривается также случай, когда орбита круговая, но имеет угол наклонения i. Зависимость географической (и геомагнитной в данном приближении) широты φ в сферической системе координат определяется известной формулой баллистики как:
 (2.1),
(2.1),
где u- аргумент широты, отсчитываемый в плоскости орбиты.
Синус и косинус угла между вектором скорости и направлением географической (и геомагнитной в данном приближении) широты соответственно равны:
![]() (2.2а)
(2.2а)
 (2.2б)
(2.2б)
Поле соленоидальной системы, установленной вдоль обитаемого объема, умноженное на sinψ, дает дополнение к дипольному полю по координате φ, а умноженное на cosψ, дает дополнительное поле по широте, отсутствующее в поле диполя при принятых приближениях. Максимум модуля ГМП на борту корабля при угле наклона орбиты i, равен: Beq (1+3·sin2i)1/2.
Записываем квадратное уравнение для ![]() , подставляем cosφ и после преобразования находим решение:
, подставляем cosφ и после преобразования находим решение:
![]() (2.3) Выражение схоже с уравнением при движении по полярной орбите, но широта φ заменена на аргумент широты u и, кроме того, оно умножено на синус угла наклонения. Знак «+» перед вторым членом выбирается из соображений меньшей мощности, которая должна расходоваться на поддержание поля. Аргумент широты можно записать как:
(2.3) Выражение схоже с уравнением при движении по полярной орбите, но широта φ заменена на аргумент широты u и, кроме того, оно умножено на синус угла наклонения. Знак «+» перед вторым членом выбирается из соображений меньшей мощности, которая должна расходоваться на поддержание поля. Аргумент широты можно записать как:
![]() (2.4),
(2.4),
где T* = Trv/2π, Trv - время обращения, а время t отсчитывается от восходящего узла.
С учетом того, что реальное ГМП не является полем диполя, можно было бы ввести поправки к полученным выражениям. Однако они невелики, причем в реальной системе это должно происходить автоматически по показаниям магнитометра. На учете отличия углов тангажа и рыскания от нуля не будем останавливаться, поскольку это делается элементарно.
Возможный недостаток предложенного решения заключается в том, что экипаж постоянно будет находиться в максимуме ГМП, которое корабль достигает при заданном наклоне орбиты и которое будет выше величины ГМП в точке старта. Таким образом, при входе в корабль и при выходе из него члены экипажа будут претерпевать небольшой скачок поля, который можно растянуть во времени за счет медленного включения и выключения системы.
В какой-то мере схожие проблемы должны возникать при дальних полетах на самолетах, особенно, в широтном направлении (например, через северный полюс). На борту самолетов уровень ГМП меняется не только из-за изменения во время полета геомагнитных координат основного поля, но и вследствие вклада так называемого аномального поля, обусловленного местными магнитными аномалиями. Оно имеет более высокую частоту (см. (Труханов и др., 1984)). Наличие магнитной системы на борту позволит устранить колебания уровня ГМП при полете и медленно снижать или повышать этот уровень до его величины в точке приземления. Однако необходимо заранее знать маршрут и максимальную величину ГМП, которая встретится на нем. Скачок поля в месте старта также неизбежен.
В медицинской практике известно создание экранированных комнат для размещения в них магнито - чувствительных пациентов. Однако в этих комнатах пациенты находятся в ослабленном ГМП, что может повлечь неблагоприятные эффекты. Стабилизация модуля магнитного поля с помощью специальных магнитных систем позволит исключить этот недостаток и обеспечивать эффективную нейтрализацию воздействия магнитных бурь. Конечно, это целесообразно только в том случае, если, как отмечалось выше, именно колебания величины ГМП являются причиной соответствующих биологических эффектов. Если же эти эффекты лишь коррелируют с колебаниями величины ГМП, а на деле за них ответственны и другие факторы, которые до сих пор не удалось надежно установить (см., например (Труханов, 1978, Trukhanov, 1998)), упомянутые выше решения могут оказаться не вполне успешными.
В п. 2.6 разбирается некорректность встречающихся в литературе утверждений, что внутри космического аппарата и, соответственно, в организме космонавта при полете в ГМП индуцируются электрические поля (ЭП), которые могут оказывать биологическое действие. В частности, в работе (Marino et al, 1979) была выдвинута гипотеза, что эти ЭП могут быть «по крайней мере, частично ответственны» за потери кальция при околоземных полетах.
Специально остановимся на этом вопросе, поскольку такие утверждения основаны на принципиальной ошибке. Будем следовать нашей работе (Труханов и др., 1984). Как известно, если в некоторой системе координат (в данном случае, связанной с Землей) магнитное поле характеризуется вектором магнитной индукции В, то в системе координат, связанной с движущимся объектом (в данном случае, с КА), вектор скорости которого относительно «неподвижной» системы равен v, появится еще и «внешнее» ЭП, равное (v ´ B). В проводящем теле (корпус КА) электроны проводимости под действием этого поля перераспределяются на поверхности так, что в любой точке внутри тела напряженность «внешнего» ЭП равна нулю независимо от того, является тело сплошным или полым. Вне проводящего корпуса ЭП равно сумме ЭП перераспределившихся зарядов и однородного «внешнего» поля и невелико (порядка долей В/м). Его воздействием при внекорабельной деятельности можно пренебречь, тем более что электропроводные элементы скафандра в определенной степени защищают космонавта от всех внешних ЭП (включая высокочастотные). Электрическое поле, которое возникает внутри КА при его движении в ГМП, может быть обусловлено лишь изменением величины магнитного потока, проходящего через тот или иной проводящий контур на борту (в том числе, и организм космонавта), из-за изменения координат и высоты КА. Оно крайне невелико.
Заблуждение, рассмотренное выше, уже имело место в истории техники. В первой четверти 20-го века предпринимались неоднократные попытки создать измерители скорости корабля или самолета относительно земли, основанные на электромагнитной индукции при движении в ГМП. Однако мешали помехи, вызывавшиеся естественным электрическим полем Земли. Попытки избавиться от этих помех, экранируя индукционный датчик проводящим кожухом, не приводили к желаемому результату: помехи исчезали, но индукционный сигнал (ЭП) тоже исчезал.
Необходимо пояснить, почему нельзя рассматривать картину с позиций наблюдателя, находящегося не на КА, а на Земле, как это неявно или явно делается в некоторых работах. Действительно в этой системе отсчета индуцированное электрическое поле внутри проводящего тела отлично от нуля. Однако суть в том, что когда объект движется относительно какой-то системы координат, то с точки зрения наблюдателя в этой системе его, так сказать, электрические свойства (например, поляризация и намагниченность вещества, из которого он состоит), будут другими, чем для наблюдателя, который движется с этим телом в сопутствующей системе. Например, если объект в сопутствующей системе обладает лишь электрической поляризацией, то в системе, относительно которой он движется, он окажется не только поляризованным, но и намагниченным. Иными словами, если можно было бы каким-то образом сверхчувствительной аппаратурой дистанционно регистрировать состояние космонавтов, то оказалось бы, что мембраны клеток в их организме не только поляризованы, но и намагничены, биотоки иные и т. д. О биофизике такого организма и, тем более, об его реакции на ЭМП что-либо сказать не представлялось бы возможным. Отбросить это обстоятельство и, тем не менее, считать, что на космонавта воздействует электрическое поле, индуцированное вследствие движения космического корабля в ГМП (или, как иногда выражаются, вызванное пересечением силовых линий ГМП), нельзя, так как и то, и другое обусловлено одними и теми же физическими законами.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
