
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Consequently, two level NPN consists from the set of common PN which are specified the structure of the net tokens and from the system net. Using this approach helps to separate in model street structure from the driver’s behavior.
The NPN Architecture
According to the NPN approach the representation of the street model can be done by the system net. And there are can be two client nets, which are the tokens of the system net. The one is the net contains states refereed only to the car and action of the driver and another one is the net with rules for the each state of the system net. In addition, NPN approach provides the firing transition synchronization of the system and client nets and also between client nets. This property is applied for updating rules on each sector containing a car net token. The transition label with ” suffix is used for marking the meaningful synchronized transitions in the nets figures below.
In scope of the model and program developing it is necessary to determine rules and properties for the proper running. Since the work of PN model based on firing transition it requires the clear mapping of what happened in simulator and how it refers on the states in the system. There are defined types of the transitions for the simulation process. The type of transition depends on the source of firing it. As a result there are two types:
· System model transitions:
o Environment’s – transitions fires by simulation world events
o Driver’s transitions – transitions fires by the user events
· Elementary – transitions that fire automatically when become available after firing of Environment’s or Driver’s transitions
Types of transitions help to create the firing sequence and compound it for the final verification. The basic simulation’s events with binding environment’s transitions are prepared before providing examination. And driver’s transitions are logged during passing examination by user.
Besides this, the group of transition is determined. It is suggested that a one transition of Environment or Driver type can contain inside itself a group of other parallel transitions, in which the number of available transitions cannot be more than one. When this grouped transition fires, the single available transition in this group is fired as a result. This approach helps to provide verification process though providing non-free choice of firing transitions for the meaningful steps of simulation. It applicable when for the one simulation event, the car net contains some referred possible transitions with one available, depending on specified states.
One of the important moments, that is necessary to take into account during the development of NPN model, is analyze and formalize traffic rules. The task is how to bring these rules into some basic properties, which can reflect characteristic of different traffic subjects as signs, traffic lights and vehicles. As a result, two main groups of violations are determined for the current task: directions’ violations and turn signals’ violation. The first group includes properties linked with driver’s possibility to move on. Then, each subject of traffic applies their own rules of driving for every direction (forward, backward, rightward, and leftward) for the current driver’s road position. These rules can be constant (as for signs and road marking) and can be dynamic (as for traffic light or crossing car). So, there is no difference for the driver what kind of sign or traffic light signal is appeared. The only permissibility for the current course direction is significant. The second group of violations is important for traffic because the turning signals are the kind of notification for the other traffic users to build their own behavior plan according to these signals. The next architecture of the model is based on this approach.
Junction structure
The structure of junction can be based on the approach which was introduced the work [3]. It supposed that crossing roads contains from logical sectors. The representation of each sector is a state in the system net of NPN. For this it should be assumed factors for reflection of physical road sector to PN model (Fig. 5):
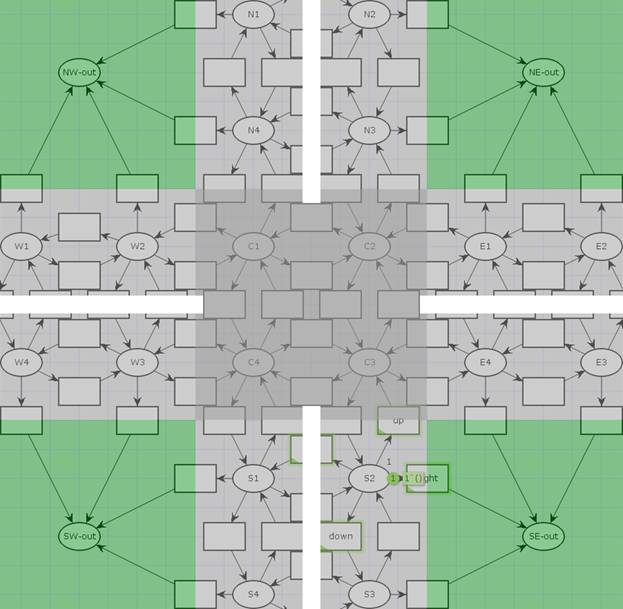
Fig. 5 The cross-road in terms of PN structure with reflection on the physical representation of the junction.
As a result the architecture of the road is “mosaic” of states:
· Each road state has only 4 neighbors states for each compass directions (north, south, east, west)
· This “center” state for each direction has two transitions – out and into the “center” state with 1-dimention arcs.
· Every state could be marked with token of elementary PN witch is the car model
· Moving car from one sector on the road to another is reflected on firing transition of the corresponding states
It covers all possible movements of the car on the road in the bound road surface. The example (Fig. 5) shows this implementation. There is an unregulated junction with one lane to each direction. The graphical colored mask shows the physical location of each state on the road. For example, the lane with direction from south to north contains S3, S2, C3, C2, N3, N2 states. And the lane with direction from west to east contains W4, W3, C4, C3, E4, E3 states. States have transitions only with states which connected with the neighbors segments. State S2 has transition up. It fires when car with student-driver in real-time simulation entry from the road to the sector of the junction with state C3. In program implementation car and each sector has physical dimension. Assumed that the length of the sector is variable and the width is a road lane width constant.
After simulation the position of the driver is checked and if car is out of the bound of the current sector the particular transition fires and moves car-token to the relative state.
On this example the center of junction contains four states – C1, C2, C3 and C4. They used to control driver’s trajectory and how he passes the junction. Because there are can be other oncoming car with path which crosses the driver’s lane. So, at this case the verification should check the property is the driver let the other car pass or not. Also it is possible that the car can drive off the road to ditch. At this case the car token goes to the finite state (for example state SE-out). This state doesn’t have any output arc. In physical sense means that this is the accident and the simulation will stop.
In case if the road contains more than one lane on the direction the number of states is also increased to reflect each sector on the corresponding lane. It is necessary to control the car location not only on the junction but during maneuver on straight highway.
The creation of such net is procedural according the initial properties. For different type and configuration of the road the system PN is generated dynamically by using prepared templates for the current type. Only token of client PN with car net can move through this system transitions. However, each road state in system net contains nested PN.
Road Sector nested PN structure
The net contains the same number of input and output transitions as for the one state in the system net. It is only extended by the inner 4 states which refers to the income direction wherefrom car is arrived (Fig. 6).
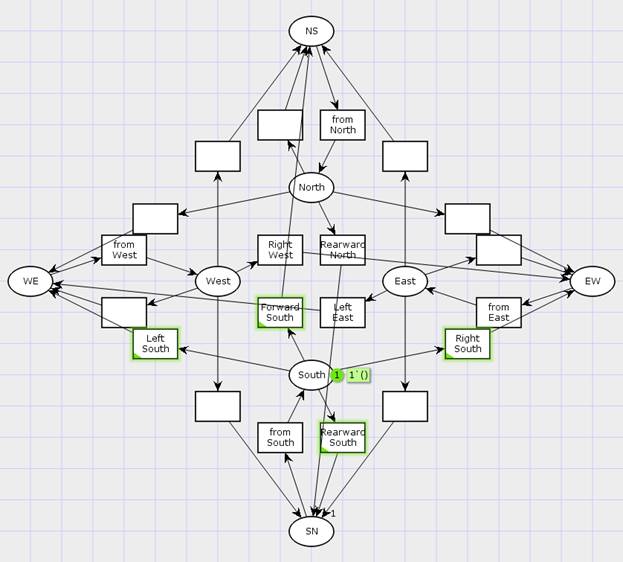
Fig. 6 The nested PN of each state in the system PN.
On the scheme there are 4 states with no connection between each other and represent the enter direction: North (car came from north), South (car came from south), East (from east), West (from west). For example, the car token in general system net (Fig. 5) is moved from S2 state to C3 state through up transition means that in nested or zoomed net (Fig. 6) this car token is moved from SN state to South state trough fromSouth transition.
Each of these states should contain the token of client PN with rule net. They not move through the net, but they always mark the state and represent the road rule for this sector of the road. The approach of states for each income direction concludes that for different directions may be different rules for the same turn on the junction. For example, there is a rule that if a car comes from south it is restricted to turn left and go to WE state through LeftSouth transition. But if a car comes from the north it is possible to turn right (in case of the course direction from north to south) and go to WE state. Practically such kind of situation is appeared on the center road sector of the junction, when cars pass it from different direction.
When car token of client PN gets into the state with rule token of client PN the horizontal synchronization of this nets is occurred according to the properties of NPN. The number of simultaneous firing is determined by world simulation events.
Rules’ Nets Structure
The pattern of the road rule to each sector is represented by classic client PN. Therefor every state in the road sector net (and therefore system net) should be marked by the token of this rule net. And they never move through system net. It means, that there is own constant tokens with PN containing rules for the North, South, West and East directions’ states in the road sector PN (Fig. 6). The rule net consists from the following three parts:
· The description of legal driveway direction
· The road priority information and its verification pattern
· Status of whether or not the violation was on this sector
When the car token gets into the new road sector state the current internal rules of the driver are synchronized with rules reflected in the present rule PN.
Direction Rules Structure
The resulting legal permission for passing through the current road sector is defined by this directional structure. The model of these directional permissions is concluded in idea that all events that can be on the road are estimated by the driver as the possibilities of the next movement on this direction; without dependence is that a prohibiting sign, or a red light, or oncoming car, only checking the available course. The whole current verification model is based on this concept. As a result each actor, which are defined the rule in the simulation (e. g. road sing, traffic light), has a reference to these transition according their own events and actions.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
