
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
· States related to the front car:
o FL – the front car is ready to turn left
o FFR – the front car is ready to turn right or drive through the junction
o Minor Forward – is marked if the front road has minor priority for the driver
o Major Forward – is marked if the front road has major priority for the driver
o Minor For Forward – the driver has minor priority relative to the front road
· States related to the right car:
o R – there is a car on the right road
o Minor Right – is marked if the right road has minor priority for the driver
o Major Right – is marked if the right road had major priority for the driver
o Minor For Right – the driver has minor priority relative to the right road
· States related to the driver road:
o Minor – is marked if the driver on the road with minor priority
o Major – is marked if the driver on the road with major priority
· States with nested queue junction rules:
o Left Rules – defines rules for the left drive direction
o Forward Rules – defines rules for the forward drive direction
o Right Rules – defines rules for the right drive direction
There is the meaning of transitions in the net (Fig. 8):
· Transitions related to the left car:
o IN L – the oncoming car on the left road of the junction is appeared and plans to turn left or drive straight
o Left MaMi – provides the rule of giving way for the driver when left car is on the major road and the driver has the minor priority
o OUT Rule L – the left car leaves the junction after providing rule of giving way.
o OUT L – the left car leaves the junction without providing obstacles for the driver
· Transitions related to the front car:
o IN FL – the oncoming car on the front road of the junction is appeared and plans to turn left
o IN FFR – the oncoming car on the front road of the junction is appeared and plans to turn right or drive straight
o FL MaMi – provides the rule of giving way for the driver when font car is on the major road and plans to turn left and the driver has the minor priority
o FFR MiMi – provides the rule of giving way for the driver when font car is on the minor road and plans to turn right or drive straightly and the driver has the minor priority
o FFR MaMi – provides the rule of giving way for the driver when font car is on the major road and plans to turn right or drive straightly and the driver has the minor priority
o FFR MaMa – provides the rule of giving way for the driver when font car is on the major road and plans to turn right or drive straightly and the driver has the major priority
o OUT Rule FL – the front car leaves the junction in the left direction after providing rule of giving way.
o OUT FL – the front car leaves the junction in the left direction without providing obstacles for the driver
o OUT Rule FFR – the front car leaves the junction in the right or forward direction after providing rule of giving way.
o OUT FFR – the front car leaves the junction in the right or forward direction without providing obstacles for the driver
· Transitions related to the front car:
o IN R – the oncoming car on the right road of the junction is appeared and plans to pass the junction in any direction
o Right MiMi – provides the rule of giving way for the driver when the right car is on the minor road and the driver has the minor priority
o Right MaMi – provides the rule of giving way for the driver when the right car is on the major road and the driver has the minor priority
o Right MiMi – provides the rule of giving way for the driver when the right car is on the major road and the driver has the major priority
o OUT Rule R – the right car leaves the junction after providing rule of giving way.
o OUT R – the right car leaves the junction without providing obstacles for the driver
The initial marking of the net depends on the desired model type of roads. The states which are specified the priority of the road can contain only one token in each minor and major pair.
The transitions with OUT titled are grouped by corresponding direction to provide simple binding of simulator events. For example, when the left car is appeared on the junction area the state L is marked. The transition OUT L becomes enabling. If the left road has major priority, the drivers has minor road and the left car is planned to drive in forward or left direction, the Left MaMi transition also becomes enabling. For the given free choice property the order of firing is defined by logged event of entering car into the junction which are linked to the Left MaMi transition. And the car from the left road leave the junction OUT Rule L transition is fired. In case of another roads’ priority, Left MaMi transition would be disabled. And when the car drives through the crossroad the OUT L would fire.
The providing rule of giving way for the driver is implemented in the nested nets of Left Rules, Forward Rules and Right Rules states. The nested nets have the common structure. There are nets on Fig. 9, Fig. 10 and Fig. 11.
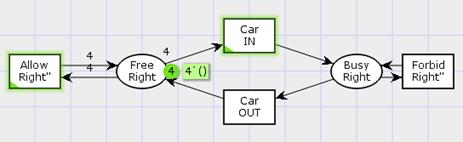
Fig. 9 The nested PN for the Right Rule state from priority rule net.
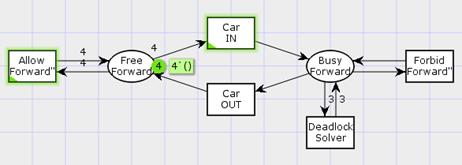
Fig. 10 The nested PN for the Forward Rule state from priority rule.
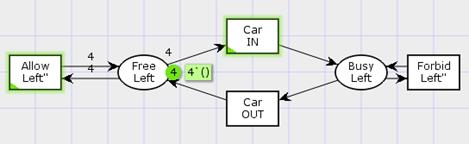
Fig. 11 The nested PN for the Left Rule state from priority rule net.
Since there is the same net pattern for each direction, the description will be based by the example of the Left Rule net (Fig 11). The distinction of the Forward Rule net (Fig. 10) is described in Model Implementation Analysis part of the paper. Left Rule net contains two states:
· Free Left – the junction is free for the left turn
· Busy Left – the junction has obstacles for the left turn
There are next transitions:
· Car IN – the car is on the junction and provides the obstacles for the driver
· Car OUT – the car leaves the junction
· Allow Left” – trigger for enabling drive to the left direction
· Forbid Left” – trigger for disabling drive to the left direction
Transition Car IN is connected with the corresponded input transitions having MiMi, MiMa, MaMa and MaMi labelling suffix of the road priority rules net (Fig. 8). When this it fires firstly, it activates the transitions with Forbid prefix. This means, that there is a car on the junction (or some cars, in case of secondary firing) and it is needed to forbid passing the crossroad in the specific directions for the driver. Forbid transition is synchronized with proper transitions from Direction Rules Net (Fig. 7). As a result the driver will get the restriction for the specific course on the junction. When the vehicle leaves the crossroad the Car OUT transition is fired together with OUT Rule transition of the road priority rules net.
There is a buffer of finite capacity which is implemented in this nested PN. The state Free Left contains 4 tokens by default. It means the maximum number of cars that can be placed on the junction and provides obstacles for the other cars from rest directions. This is based on physical and logical aspects of placing vehicles on the road. Every central state (C1, C2, C3 and C4) of the junction net (Fig. 5) can fit only one car because of the real world average sizes of a vehicle. Any left turn is the situation when the maximum number of cars coming from one direction and holding the maximum number of meaningful states. The confirmation is concluded in the example of left turn on the junction from south to west. In this case, the valuable states containing car net token are S2, C3, C2 and C1. Consequently the final amount of vehicle, which can be placed on the crossroad, is 4. When the car (in the given example) gets into the W2 state, the Car OUT transition is fired. As a result, the permission to drive would be produced if there are no tokens in states with prefix Busy. This is providing by Allow transitions having 4 arcs checking the initial capacity buffer.
The summary of the designed road priority net is that in case there is no traffic by default the drive thought the junction is permitted. And only when the oncoming car is appeared on the junction it may influence on the specified prohibition for the driver’s course.
Rules’ Violation Structure:
The third part of the rule net consists from violations accumulator. It should provide fixing of prohibitions that are occurred on the current road sector. According to basic driver’s verification properties there are two final types of violation: wrong direction drive and turn signal offence. There is the structure of rules’ violation on Fig. 12:
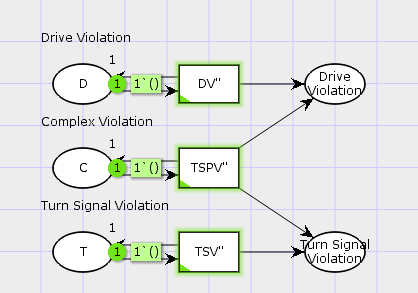
Fig. 12 The PN structure of violation accumulator.
The structure contains two states which are keeping the number of direction drive and turn signal violation. There are three common transitions synchronized with the corresponded transitions in the car net:
· DV” – fires in case any directional violation, if a car goes wrong way
· TSV” – fires in case when a driver is executing a manoeuvre, and forget to turn on signal or turn on the signal for wrong direction

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
