
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
· TSDV” – fires in case of a complex violation, when a driver turns to the wrong direction with giving wrong turn signal. As a result there is a double violation and it marks the states of another violation groups.
Because of that for every road sector there is one rule net, it is simple to define where on the road such kind of failure was happened. The final positive results of examination are concluded by the existence of tokens in states Drive Violation and Turn Signal Violation.
Car Net Structure
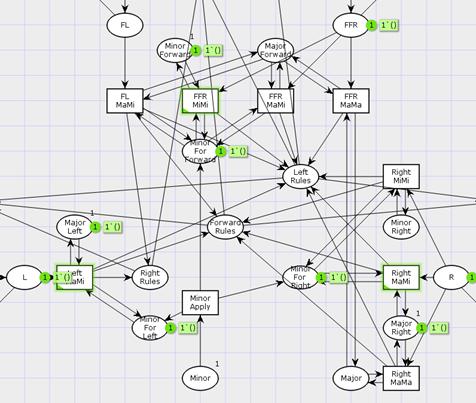
The car net is represented by the client PN. It should include the main properties of car in respect to the traffic rules and contain the reflection of driver’s behavior. This property contains the physical state of the car. The PN structure of car-token is on Fig. 13.
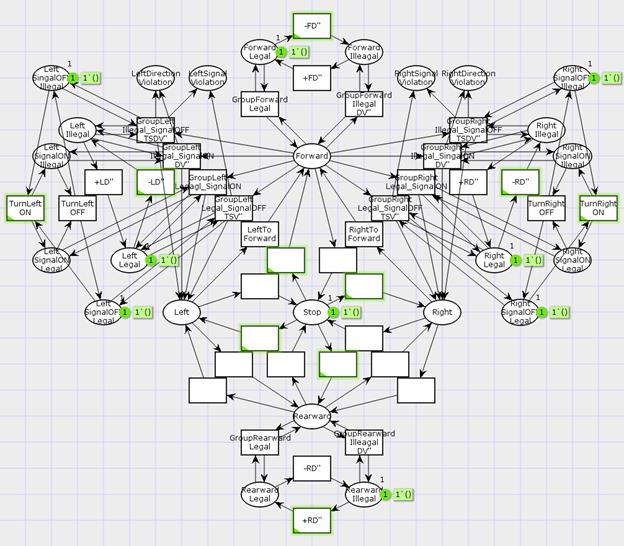
Fig. 13 The PN structure of the car with containing the meaningful properties for verification.
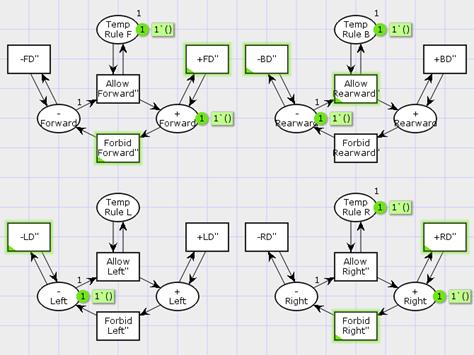
The car net also consists from different logical parts. The central part includes the drive course states: Forward, Left, Stop, Right, and Rearward. They refer to the car’s moving direction on the road and in the system net. When the driver is moving straight forward, the state Forward is marked, when turns right – Right is marked, when the car is parked – Stop is marked.
There are sets of rule states for each direction. Every set contains a pair of states and transitions. For example, there are RightIllegal and RightLegal with +RD” and –RD” transitions for the right direction rules. These transitions are synchronized with the same transitions in the rule net (Fig. 7) of the common state where car token and rule token are placed. The horizontal synchronization provides to reflect the current rule of the road sector to the car net for the next verification process.
The turn signal signalization is also reflected on the net. There are two sets for the right and left turn signal with two states represented on and off. Transitions TurnLeft/RightON and TurnLeft/RightOFF have the user type and fires by the driver actions to mark the corresponding indicator state.
According to base approach of the work, all meaningful actions of the driver are logged. This includes position of the car relatively to the sectors of road, the events of turning on and off signals with marking in what state it was done and the information about oncoming traffic. On the verification stage the sequence of logged events fires the transitions correspondingly both in system and client PNs. The car net exactly provides the verification of traffic rules and reports about violation through firing synchronized transitions of the rule net by the saved events sequencre. According to this, account must be taken of all possible meaningful combinations of the drivers’ actions and rules.
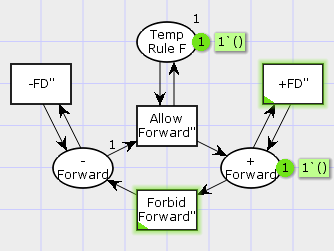
Depending on the current direction rule different transitions can be fired. For example, When car is moving forward the event always notify grouped forward transitions (GroupForward). Only the single transition in this group can be available because each of them is binding to the corresponding state of directional rule. The rule net through synchronization fires –FD” or +FD” transitions. After that GroupForwardLegal (for legal drive) or GroupForwardIllegal_DV” (for prohibition) transition becomes available. In case, if it is illegal action the with synchronized GroupForwardIllegal_DV” transition fires DV” transition in the rule net (Fig. 12).
In a particular model this is the combination of all states for right and left directional rules and turn signals. Since each of them has two states, there are 4 possible transitions for all outcomes during turning movement. These 4 transitions for each direction are grouped (GroupLeft, GroupRight) and synchronized horizontally by rule net and vertically by system net according to NPN approach. It means, that for example when a car make turn right on the road sector (Fig. 6., transition RightSouth), it synchronized with the GroupRight transitions (Illegal SingalOFF TSDV”, Illegal SignalON DV”, Legal SignalON, Legal SignalOFF TSV”) and at this time the only one available transition of this group is fired. The availability of transitions in the group depends on the direction states (RightIllegal, RightLegal) and turn signal states (RightSignalON, RightSignalOFF). There are one completely legal (Legal_SignalON) and three unlawful (Illegal SingalOFF TSDV”, Illegal SignalON DV”, Legal SignalOFF TSV”) transitions. According to the kind of violation the corresponding transition in rule net (Fig. 12) is synchronously fired (TSDV”, DV”, TSV”).
Consequently, after synchronously fired transitions the rule net could contain the information about violations of the this we conclude that the verification is finished and can provide the result of examination.
Model Implementation Analysis
Rules Exceptions
The origin traffic code contains some mistakes and inaccuracy. One of the most essential instant includes the unregulated junction of roads with minor priority and with cars on each side. According to traffic rules when the drivers have the same road priority the conflict of giving way is resolved by right-hand rule. This leads that, all drivers on the junction get the situation when everyone should give way to everyone. And the next forward movement would be illegal. As a result there is the deadlock problem. Traffic code does not solve such problem but it is a common situation. In real life randomly someone of the drivers should pass the junction first. Formally it is a violation, but adequately decision for solving deadlock. To provide such solution there is a specific Deadlock Solver transition in nested Forward Rule net (Fig. 14).
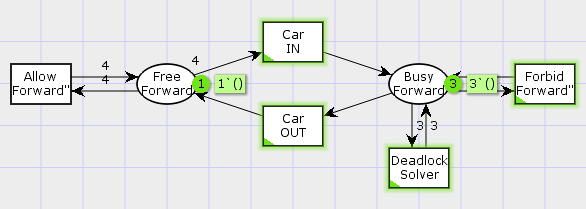
Fig. 14 The nested PN with deadlock solver for the Forward Rule state from priority rule.
The situation would be classified as rule exception if every car on the junction has the same marking as on Fig. 14. The state Busy Forward contains 3 token. They represents that the current driver has 3 cars as an obstacle to pass the crossroad. Also the Deadlock Solver transition becomes available to fire. So, when Deadlock Solver is enabled for every driver the simulation environment get acknowledgement that the first car, which enters into the junction the Allow Forward” transition is manually fired. This leads that in this case there would be no violation for the current car. After that, the right car from the first would not have any obstacles and can legally pass the crossroad.
Examples of rules applying
There are rules patterns of applying road situation to the designed model for simulation. Some significant examples of reflecting road signs to the rule net are in the Table 4:
TABLE 4
Road Sign | Rule PN marked model |
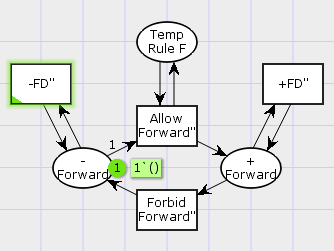
This sign constantly forbids the drive in forward direction |
|
The red light temporary forbids the drive in forward direction |
|
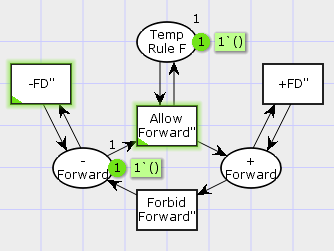
The green light temporary permits the drive in forward direction |
|
This sign constantly permits the drive in forward and right directions and forbids the left turn |
|
This sign set the drivers road to minor priority. On PN there are oncoming cars from each direction. The front car has minor priority, the left and the right major priority |
|




Basic Net Properties
The PN properties of the designed model are specified. Because of the origin task the patterns for creating road structure are defined. This leads that the car token can physically reach any road state. At this case the model is liveliness. The coverability of the road net is bounded by important real world aspects for verification. The simulation is finished when the driver reaches the end point of the examination, or gets into the off-road states (e. g. SE-out state on Fig. 5), or has an accident with another car. As a result the model is terminating. The road net is 2-safe of car token. In the simulator each road sector is the size of the simulated car. As a result the maximum number of car tokens in the road state is two – the one car is going out and another is going into the sector.
Conclusion
Rely on determined approaches it’s possible to provide checking observance of traffic rules by drivers. The analysis of different formal methods of PNs was produced for determining the suitable model. Based on NPN approaches this work covers new ideas of verification in road-traffic knowledgebase. We refereed the most critical cases from the real domain with model. Analyzing the problem of simulation and PNs’ characteristics helps to distingue three components of the model: the street structure, the rule structure and the car structure. Based on this approaches the architecture of each part was composed staring from traffic rules and common simulation tasks. The method of analyzing of the model was also introduced by inventing two basic violation factors: directions and turn signals. There are the result capabilities of the model:
· implementing road signs (priority signs, prohibiting signs, leading signs)
· applying road marking
· supervising turn signals
· simulating traffic-lights
· interaction with traffic users
The reachable result is implementation of extended approach for driving exams – real-time 3D simulator with self-acting checking. And for this aims NPN is a flexible approach for verification driver’s behavior on the road this paper it proofs its consistency.
References
1. Dotoli M., Fanti M. P. An urban traffic network model via coloured timed Petri nets. / M. P. Fanti // Control Engineering Practice. – 2006. – № 14. – С. 1213–1229.
2. Soares M. S., Vrancken J. Responsive Traffic Signals Designed with Petri nets / M. S. Soares, J. Vrancken // IEEE International Conference on Systems, Man and Cybernetics. – 2008. – C. 1942 – 1947.
3. Farhi N., Goursat M., Quadrat J-P. Road Traffic Models using Petri Nets and Minplus Algebra / N. Farhi, M. Goursat, J-P. Quadrat // Traffic and Granular Flow ’07. – 2009. – № 1. – C. 281 – 286.
4. Kubátová H. Modeling by Petri Nets / H. Kubátová. // Acta Polytechnica. – 2005. – № 45. – С. 5 – 13.
5. Jenson K. Colored Petri Nets and The Invarient-Method / K. Jenson // Theoretical Computer Science – 1981. – № 14. – С. 317 – 336.
6. Hee K., Serebrenik A., Lomazova I. A., Sidorova N., Oanea O., Voorhoeve M. Nested nets for adaptive systems / K. Hee, A. Serebrenik, I. A. Lomazova, N. Sidorova, O. Oanea, M. Voorhoeve // Petri Nets and Other Models of Concurrency - ICATPN 2006. – 2006. – № 000. – C. 241 – 260.
7. Ломазова сети Петри: моделирование и анализ распределенных систем с объектной структурой / — М.: Научный мир, 2003. — 208 c
8. Dworzanski L. W., Frumin D. I. NPNtool: Modelling and Analysis Toolset for Nested Petri Nets / L. W. Dworzanski, D. I. Frumin // Proceedings of the Spring/Summer Young Researchers’ Colloquium on Software Engineering – 2013. – № 3. – С. 9 – 14.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
