
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
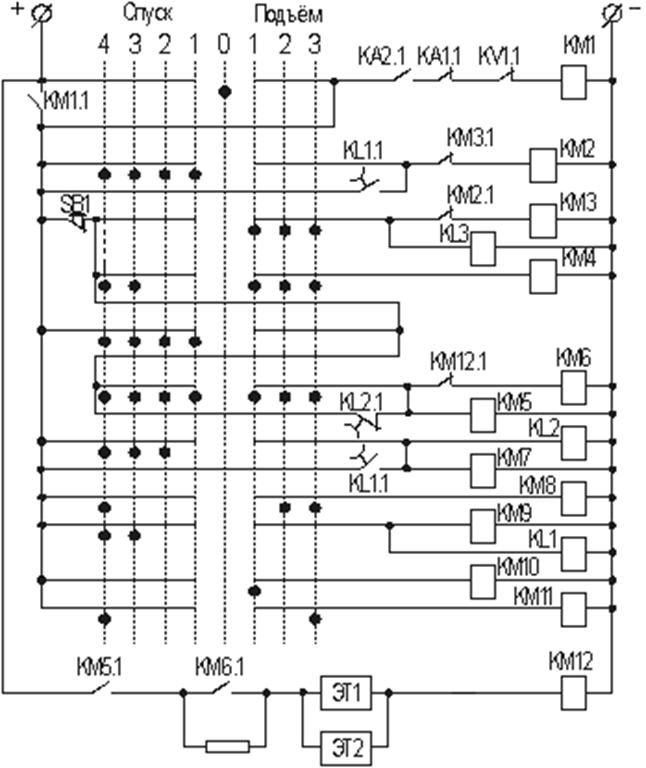
При переводе рукоятки командоконтроллера с нулевого положения и включении реверсирующих контакторов КМ3 или КМ6 срабатывает контактор КМ15. Обмотка тормозного электромагнита YB подключается на полное напряжение сети, а катушка реле КМ14 контактом КМ15.1 замыкается накоротко. Реле КМ14 обеспечивает выдержку времени, несколько большую времени включения тормозного электромагнита YB. После отпадания якоря реле КМ14 его замыкающий контакт КМ14.1 отключает катушку контактора КМ13, вследствие чего в цепь YB вводится сопротивление. В момент включения тормозного электромагнита к его обмотке подводится напряжение, большее номинального, вследствие чего достигается форсирование процесса включения. Потери в катушке электромагнита после включения снижаются введением ограничивающего резистора.
Защита электропривода осуществляется наличием в магнитном контроллере КС блокировки, предотвращающей включение двигателя на подъем груза, если в предшествующий рабочий период произошло приваривание одного из контакторов ускорения KM10, KM11, KM12.
На положении командоконтроллера 1, как и на всех последующих, при подъеме грузов, кроме контактора KM15, включаются контакторы направления KM4, KM3 и противовключения KM8. Далее при передвижении рукоятки командоконтроллера последовательно включаются контакторы ускорения KM9, KM10, KM11, KM12. Последние два включаются с выдержкой времени, которая обеспечивается реле ускорения KM1, KM2.
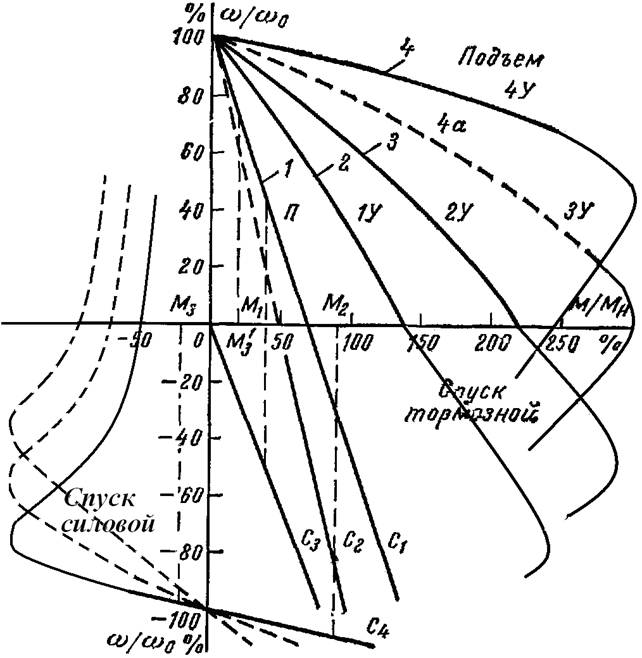
Механические характеристики двигателя, соответствующие каждому положению командоконтроллера при подъеме и спуске грузов, приведены на рис. 5 б. Объективный контроль над процессом пуска двигателя осуществляется реле ускорения, а не оператором. Это позволяет быстрее и надежнее управлять краном, защищать двигатель от возникновения чрезмерных токов, вызывающих при частых включениях его перегрев и выход из строя. Кроме того, снижаются динамические усилия на канатах и редукторах, что увеличивает срок службы механического оборудования крана.

а
б
Рис. 5. а) Принципиальная схема магнитного контроллера типа КС
б) Механические характеристики асинхронного двигателя, управляемого магнитным контроллером типа КС
В положении командоконтроллера 3 при опускании груза включается контактор KM6, в результате чего срабатывают блокировочное реле KM7 и контакторы КМ15 и KM8, а за ними – контакторы КМ3, KM9. Статор двигателя подключается к двум фазам сети контакторами KM3, KM6. Положению 3 соответствует характеристика СЗ (рис. 5 б), она относительно пологая и при нагрузках от 0 до 100%МН позволяет получить скорость, не превышающую допустимую. Указанное обстоятельство повышает надежность работы электропривода и дает возможность оператору работать с меньшим напряжением. Наличие характеристики СЗ также существенно отличает магнитный контроллер КС от ТС.
Если скорость опускания груза на положении 3 не обеспечивает необходимого режима работы, в магнитном контроллере КС имеются возможности изменить ее. При передвижении рукоятки командоконтроллера к нулю можно получить две характеристики противовключения С2 и С1. Последняя используется для спуска относительно тяжелых грузов. Положение 4 обеспечивает получение основной и промежуточной характеристик С4, которые пригодны для силового спуска легких грузов или для работы со скоростью выше синхронной при спуске тяжелых грузов.
Схема 6. Управление электроприводом замыкающей лебедки
В настоящее время на действующих перегружателях наибольшее распространение имеет система генератор-двигатель. Она относительно проста в управлении, надёжна в работе и обеспечивает благоприятный характер протекания переходных режимов. В тяжёлых условиях эксплуатации перегружателей система Г-Д зарекомендовала себя с положительной стороны.
Электропривод передвижения тележки перегружателя не имеет каких-либо особенностей, отличных от аналогичных крановых приводов. Следует отметить только, что маховые массы тележки, приведённые к валу двигателя, в 10 раз и более превышают маховый момент ротора двигателя. Поэтому пуск и торможение двигателя затянуты во времени. В ряде случаев время переходных процессов сравнимо со временем цикла работы. Это требует применения электропривода, позволяющего получить оптимальный по ускорению и времени характер протекания переходных процессов, что и осуществляется системой Г-Д.
Значительный интерес представляет электропривод грейферного подъёма. Рабочие операции грейфера производятся с помощью двух лебёдок, каждая из которых приводится в движение двигателем постоянного тока, управляемым по системе Г-Д. Электропривод грейфера должен удовлетворять следующим требованиям: регулирование скорости при диапазоне Д=(5÷8):1, согласование механических характеристик; ограничение момента двигателя при стопорении для предохранения канатов и механического оборудования от недопустимой перегрузки. Переходные процессы должны протекать плавно, без превышения допустимых ускорений.
В соответствии с техническими требованиями для электропривода грейферных механизмов применяется чаще всего система Г-Д с управляющим возбудителем, схема, которой приведена на рис. 6. Возбудитель В имеет три обмотки управления – задающую Ш1, обмотку положительной обратной связи по напряжению генератора Ш3. Ограничение тока в цепи якорей главных машин обеспечивается обмоткой Ш2, с помощью которой осуществляется отрицательная обратная связь по току якоря. Большинство аппаратов защиты и блокировки встречалось уже в рассмотренных ранее схемах магнитных контроллеров. Вследствие этого их работа не требует дополнительных пояснений.
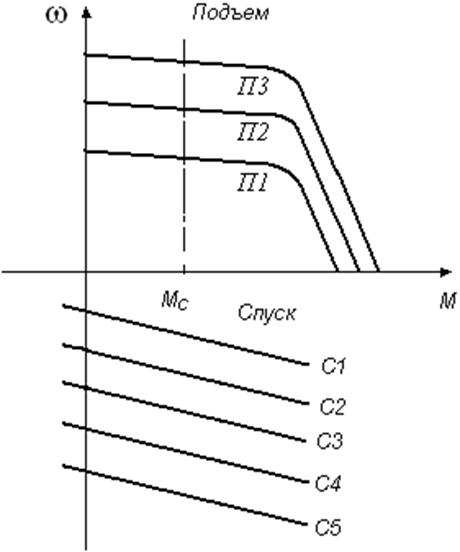
На рис.6 б приведены характеристики электропривода при подъёме и спуске грейфера в различных режимах работы. Характеристиками при подъёме являются П1, П2 и П3, а при спуске – С1, С2, С3, и С4. характеристика С5 имеется только у электропривода механизма замыкания и служит для быстрого раскрывания грейфера при спуске с максимальной скоростью.
Для плавного перехода с одной характеристики на другую в схеме имеются реле времени KL1, KL2, KL3, которые позволяют осуществить переключения в схеме через промежуточные положения с введением дополнительных ступеней регулирования, снижающих толчки тока в главной цепи при переключениях. Система Г-Д, применяемая для привода механизмов переключателей, имеет преимущественное распространение перед другими системами электропривода.
 |  |
а
б
Рис. 6. а) Схема управления электроприводом замыкающей лебёдки
б) Механические характеристики электропривода замыкающей лебедки
Схема 7. Управление электроприводом маятниковой канатной дороги
При выборе электропривода канатной дороги очень важным является предварительное упреждение его режимов работы в соответствии с уклонениями трассы и загрузки в течение рабочего периода. Электропривод может работать только в двигательном режиме, осуществляя подъем грузов, только в генераторном режиме, производя спуск грузов, и со знакопеременной нагрузкой, когда, например, за рабочую смену характер нагрузки несколько раз меняется и двигатель работает то в генераторном, то в двигательном режиме или в двигательном режиме «вперед-назад» по местности с малыми уклонами.
В тех случаях, когда электропривод работает только в двигательном режиме, но «вперед» и «назад» при горизонтальной добавке грузов применяется асинхронный двигатель с контактными кольцами и относительно простая схема управления с многоступенчатым пусковым реостатом (рис. 7.1). Управление пуском двигателя осуществляется посредством командоконтроллера, контакты которого введены в цепи катушек реверсивных контакторов KM7 – SA2 и KM8 – SA3 и контакторов ускорения KV1-KV8. Контроль пуска двигателя осуществляется электромагнитными реле времени KT1–KT8, катушки которых получают питание от выпрямителей.
Напряжение к силовым контактам KM7.2-KM7.4 и KM8.2-KM8.4 подводится через автомат KM1 с катушкой минимального напряжения. Включение двигателя может быть произведено в том случае, когда закрыт контакт КМ9.1 реле контроля пуска KM9, контакт КМ1.1 автомата KM1, контакт КМ10.1 центробежного реле KM10 и контакт КМ6.1 промежуточного реле KM6, тогда, если нажать кнопку SB2 (Включено) в цепи контакта SA1 закрытого в нулевом положении командоконтроллера получит питание реле КМ4. Если нажать кнопку SB2 «Пуск» в цепи контакта SA1 командоконтроллера, включенного в нулевом положении, получат питание реле КМ5, КМ6.
Заметим, что в схему между точками а и б включается ряд блокировочных контактов, которые должны быть закрыты при пуске. Эти контакты вводятся в цепь по соображениям техники безопасности, они фиксируют готовность участков дороги к работе и нормальное техническое состояние отдельных ее узлов (например, натяжение тянущих и несущих канатов). Пуск канатной дороги может быть произведен только по распоряжению диспетчера, который запрашивает сведения о готовности участков дороги к пуску и, только получив подтверждение готовности, дает сигнал на включение. Такая система пуска необходима для предупреждения возможных несчастных случаев на дороге.
После срабатывания реле KM4 получит питание КМ5 и включается электромагнит тормоза YB, колодки которого отпускают тормозной шкив, и электродвигатель может быть включен. При этом его установившаяся скорость будет определяться величиной пускового сопротивления и, следовательно, положением рукоятки командоконтроллера. Пусковые сопротивления рассчитываются обычно на длительный режим работы, так как электропривод должен обеспечивать движение на низкой скорости при опробовании, наладке и ремонте дороги.
Схема включения реле ускорения KV1-KV8 составлена таким образом, что указанные реле срабатывают не только в функции от времени; при их работе осуществляется и контроль по току статора двигателя. Для этой цели в схеме используется токовое реле KM3. Контакт реле закрывается при возрастании тока во время включения двигателя и при выведении ступеней сопротивления. В период снижения тока контакт реле KM3.1 открывается. Когда контакт реле KM3.1 закрыт, получает питание катушка очередного реле ускорения. Достигается это наличием парных замыкающих и размыкающих контактов KV1, KV2 и т. д. в цепях катушек реле ускорения. До начала пуска все катушки реле ускорения, кроме KT1, получают питание через размыкающие контакты контакторов ускорения KV1-KV8. Катушка реле KV1 получает питание в первый момент после включения двигателя в результате срабатывания реле KM3. Отсчет выдержки времени любого реле ускорения KT1-KT8 начинается только после того, когда ток двигателя станет меньше тока отпускания KM3. После отпускания реле ускорения с выдержкой времени включаются соответствующие контакторы ускорения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
