
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
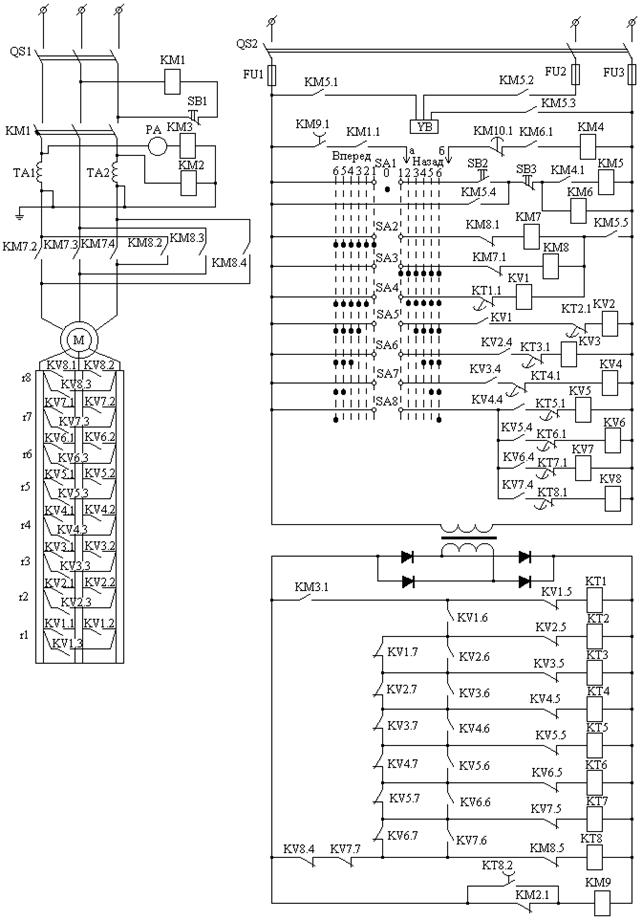
Рис. 7.1. Схема управления асинхронным электроприводом маятниковой
канатной дороги

Рис. 7.2. Пусковая диаграмма асинхронного электропривода канатной дороги
Максимальная защита в схеме осуществляется реле KM2, размыкающий контакт которого включен в цепь катушки реле времени KM9. На период пуска контакт KM2.1 шунтируется замыкающим контактом KT8, который открывается с выдержкой времени по окончании пуска двигателя. Если ток статора в процессе работы превосходит допустимую величину, то контакт KM2 открывается, катушка реле KM9 теряет питание, с выдержкой времени открывается его контакт в цепи реле KM4. Двигатель при этом отключается от сети, и система затормаживается тормозным устройством. В случаях аварий на линии, связанных с повышением скорости или механическими повреждениями, которые фиксируются защитными или блокировочными аппаратами, электрические тормоза накладываются мгновенно.
На рис. 7.2 приведены пусковые характеристики асинхронного электропривода канатной дороги. Пуск двигателя производится в восемь ступеней, что позволяет снизить величину колебаний момента двигателя при переключениях, а значит, и уменьшить колебания ускорений при пуске. Для рассматриваемой диаграммы пусковой момент колеблется в пределах (1,1-1,7)МH, т. е. отклонения момента от среднего значения составляют 21,5%. При полностью введенном в цепь ротора сопротивлении и при замкнутом контакторе KV1 двигатель развивает момент меньше номинального. Эти две ступени служат для выбора люфтов в редукторе и слабины в канатах и при автоматическом пуске используются кратковременно.
Схема 8. Управление асинхронным электродвигателем кольцевой
канатной дороги
Применение асинхронных электродвигателей на канатных дорогах целесообразно в том случае, когда производится спуск грузов и возможна рекуперация энергии в сеть. Пуск в данном случае обычный реостатный, по окончании которого сопротивление шунтируется и двигатель, работая в рекуперативном режиме, осуществляет торможение спускающегося груза.
Здесь существуют также и другие требования к процессу торможения дороги при остановке. Если просто отключить двигатель и наложить тормозные колодки, то вся энергия движущихся масс должна быть погашена в тормозном устройстве, что усложняет конструкцию и снижает его надежность. Потому применяется электродинамическое торможение, а тормозные колодки накладываются при скорости порядка 0,1wН.
На рис. 8.1 приведена схема управления асинхронным электроприводом кольцевой канатной дороги. Электропривод работает с рекуперацией энергии в сеть в нормальном режиме, а также в режиме динамического торможения при отключении от сети. Управление двигателем осуществляется посредством командоконтроллера и универсального переключателя SA. Постоянный ток к статору подводится от полупроводникового выпрямителя через контактор КМ6. К сети 380 В выпрямитель подключается контактором КМ5. В нулевом положении командоконтроллера включается реле КМ2, через замыкающие контакты которого в дальнейшем питаются все цепи управления. Не останавливаясь подробно на действии блокировочной цепочки с реле КМ2, отметим только, что между точками а и б включаются блокировочные аппараты, исключающие пуск двигателя, если дорога не подготовлена к работе и диспетчер не дал разрешения на ее включение.
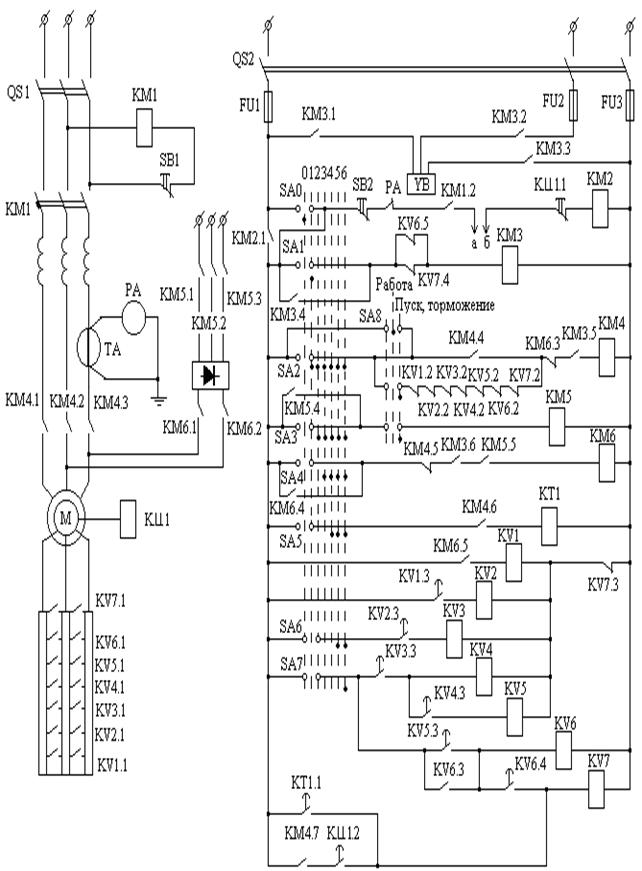
Рис. 8.1. Схема управления асинхронным электроприводом канатной
дороги с рекуперацией энергии и динамическим торможением
Пуск двигателя осуществляется при постановке универсального переключателя SA8 в правое положение, при котором замкнуты две нижние пары контактов. Рукоятка командоконтроллера также перемещается вправо, переходя последовательно все положения. В первом положении включается контактор КМ3, а значит, и тормозной электромагнит YB. Затем, если исправны контакторы ускорения, через их размыкающие блокировочные контакты получает питание катушка линейного контактора КМ4. Срабатывание последнего приводит к подключению статора двигателя к сети переменного тока.
Во втором положении производится контрольное включение КМ5, при котором загорается сигнальная лампа, указывающая на наличие напряжения постоянного тока и готовность установки к тормозному режиму. В четвертом положении включается реле времени КТ1, которое с выдержкой времени около 10 с включает контактор КV7, вследствие чего выводятся все сопротивления в цепи ротора. Дальнейшее движение рукоятки командоконтроллера не вносит изменений в схему управления. Пусковой режим, таким образом, осуществляется при одной ступени сопротивления в цепи ротора. В том случае, когда скорость двигателя достигает номинального значения раньше, чем реле времени КТ1 замкнет свой контакт, замыкается контакт пускового центробежного реле КЦ1.2 и подается напряжение к катушке контактора КV7. По окончании пуска загорается соответствующая сигнальная лампа, а переключатель SA8 ставится в положение «Работа», вследствие чего отключается контактор КМ5, для того чтобы не производился излишний нагрев выпрямителей.
Остановка канатной дороги производится в следующем порядке. Прежде всего, рукоятка SA8 поворачивается вправо, и включается под напряжение катушка контактора КМ5, а цепь катушки контактора КМ4 готовится к отключению. Затем рукоятка командоконтроллера переводится в нулевое положение, вследствие чего отключаются линейный контактор КМ4, реле КТ1 и контактор KV7. Контакторы КМ5 и КМ3 остаются включенными. При последующей установке командоконтроллера в положение 3 включается контактор динамического торможения КМ6, и следом за ним без выдержки времени срабатывает контактор KV1. Для управления динамическим торможением рукоятка командоконтроллера вновь перемещается вправо. Если она задерживается в положении 3 или 4, то двигатель будет далее работать в режиме динамического торможения на характеристике 2 (рис. 8.2), т. к. контактор KV2 с выдержкой времени зашунтирует вторую ступень сопротивления в цепи ротора. Далее, передвигая рукоятку контроллера в положения 5 и 6, можно получить две устойчивые тормозные характеристики при срабатывании контакторов ускорения KV3 и KV7, а также переходные, обусловленные последовательным срабатыванием контакторов ускорения KV4, KV5, KV6. Остановка производится нажатием на кнопку SB2 «Стоп».
Уставки реле времени рассчитываются в соответствии с техническим заданием на длительность торможения, которая выбирается обычно в пределах 15-30 с. После выхода двигателя на низкую скорость при работе на характеристике 7 любым выключателем в цепи катушки реле КМ2 схема управления может быть отключена от сети, в результате чего на тормозной шкив будут наложены колодки.
На рис. 8.2 приведены характеристики асинхронного электропривода канатной дороги с активным моментом на валу. Пуск двигателя осуществляется на характеристике 1’, нормальная работа в генераторном режиме – на естественной характеристике, при остановке двигатель работает в режиме динамического торможения на характеристиках 1-7.
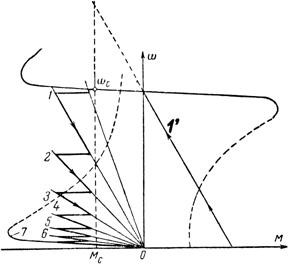
Рис.8.2. Механические характеристики асинхронного электропривода канатной дороги при пуске, нормальной работе и динамическом торможении
Схема 9. Согласованное управление несколькими электродвигателями конвейеров
Схема электропривода нескольких конвейеров, движущихся с одинаковой скоростью, изображена на рис. 9. Привод конвейеров осуществляется асинхронными двигателями M1 и M2. Число последних может быть увеличено при большем количестве конвейеров без принципиальных изменений схемы. Статорные обмотки двигателей конвейеров включаются в сеть переменного тока постоянной частоты f1. Роторные обмотки двигателей питаются от асинхронного преобразователя частоты АПЧ, который приводится во вращение двигателем M через вариатор В. Статорные обмотки M и АПЧ подключаются также к сети переменного тока постоянной частоты f1. Для пуска двигателя M в его роторной цепи предусмотрен пусковой реостат с тремя контакторами ускорения КМ8, КМ9, КМ10. Защита двигателей M, M1 и M2 от перегрузки осуществляется тепловыми реле КК1, КК2, КК3. Двигатели конвейеров в случае необходимости могут быть отключены от общей системы с помощью двух рубильников. Скорость ротора АПЧ в рассматриваемой системе может изменяться вариатором В. В некоторых установках применяется регулирование скорости АПЧ путем изменения сопротивления в цепи ротора M. Двигатели M1, M2 в системе согласованного вращения, приведенной на схеме, являются машинами двойного питания, скорость их определятся выражением:
![]() ,
, ![]() .
.
Если двигатели конвейеров и АПЧ подключены к сети, причем последний находится в неподвижном состоянии, то частоты статорной и роторной цепей двигателей равны, следовательно, двигатели будут находиться в состоянии покоя. После того как ротор АПЧ начнет вращаться, например, в направлении вращения его поля, частота на его кольцах уменьшится, и скорость двигателей конвейеров будут пропорциональна разности частот f1-f2. В случае вращения ротора АПЧ против направления вращения поля его статора скорость приводных двигателей определяется разностью частот f2-f1, так как частота f2 будет больше f1.
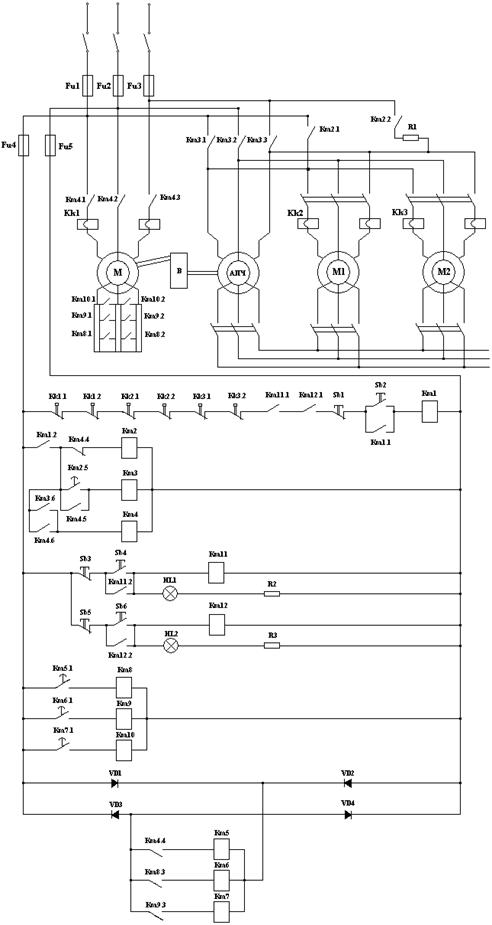
Рис. 9. Схема включения двигателей при согласованном движении
нескольких конвейеров
При равных нагрузках двигатели конвейеров будут вращаться с одинаковыми скоростями, векторы э. д.с. их роторов сдвинуты при этом на одинаковый угол относительно вектора э. д.с. ротора АПЧ. Увеличение нагрузки на валу одного из двигателей приводит к возрастанию угла рассогласования между э. д.с. его ротора и э. д.с. ротора АПЧ, при этом увеличивается ток ротора двигателя, а, следовательно, и его момент. Все двигатели в приведенной системе согласованного вращения будут работать с одинаковой скоростью, а роторы их будут сдвинуты в пространстве относительно ротора АПЧ на некоторые углы в соответствии с нагрузкой каждого конвейера.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
