
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Алтайский государственный технический
университет им. »
, Ю.
ЭЛЕКТРООБОРУДОВАНИЕ
ОБЩЕПРОМЫШЛЕННЫХ МЕХАНИЗМОВ
Методические указания к лабораторным работам
студентов специальности 140400
Барнаул 2012
УДК 628.352 (075.8)
, Ю.
Электрооборудование общепромышленных механизмов. Методические указания к лабораторным работам студентов специальности 140400 в соответствии с лекционным курсом. Барнаул, АлтГТУ 2013 г. С.58.
Рассмотрено и одобрено на
заседании кафедры АЭП и ЭТ
Протокол № от. .2012 г
Введение
Методические указания для самостоятельной работы по курсу «Электрооборудование общепромышленных механизмов» предназначено для развития и закрепления навыков у студентов «читать» различные системы автоматического управления электроприводом. Здесь собраны в основном типичные релейно-контакторные схемы управления наиболее распространенных вспомогательных механизмов общепромышленного использования, где не требуется сложных схем управления электроприводами, однако принципы управления остаются характерными и для других более сложных электроприводов.
Как известно, имея определенные навыки (а вы их имеете) преобразования любых релейно-контакторных схем в схемы, выполненные на дискретных логических элементах или, имея навыки по составлению программного обеспечения работы схемы по аналогу релейно-контактной схемы, не составит труда перейти на управление данных электроприводов на современные дискретные микропроцессорные системы управления.
Желаем успехов в Вашей самостоятельной творческой учебе!
Схема 1. Защитная панель типа ППЗК
На рис. 1 приведена схема защитной панели типа ППЗК, предназначенной для защиты трех двигателей постоянного тока приводов основных механизмов крана. На схеме показаны также контакты конечных выключателей и блокировочные контакты контроллеров. Выше схемы включения аппаратов управления показана схема силовой цепи с контактами контакторов КМ5, КМ6, КМ7, КМ8, катушками максимальных реле КМ1, КМ2, КМ3, КМ4, а также катушками тормозных электромагнитов ЭТП, ЭТТ, ЭТМ. В приведенной схеме командоконтроллеры КК1, КК2 и КК3 относятся, соответственно к оборудованию механизмов: моста, тележки и подъема.
Питание к двигателям крановых механизмов подводится от одного троллея через контакт общего контактора КМ5, и от другого — через контакты контакторов КМ6, КМ7, КМ8, и силовые контроллеры. Катушки электромагнитов тормозных устройств подключаются к сети замыкающими вспомогательными контактами соответствующих контакторов. Реле максимальные используются на панелях типа ППЗК таким образом, что в главную цепь каждого двигателя включается катушка реле. Кроме того, одна катушка реле включается в общий силовой провод. Включение контакторов может быть произведено, как видно из схемы, только после установки контроллеров в нулевое положение. При выходе за пределы рабочей зоны любого из механизмов повторное включение его двигателя, так же как на панели переменного тока, возможно только для работы в противоположную сторону. Это контролируется конечными выключателями SQ1÷SQ4, соответственно. На панели используется групповое максимальное реле КМ1, на общем основании которого и обеспечиваются питанием все остальные катушки магнитных пускателей. Кнопка SB1 – «Пуск», а кнопка SB2 – «Стоп».
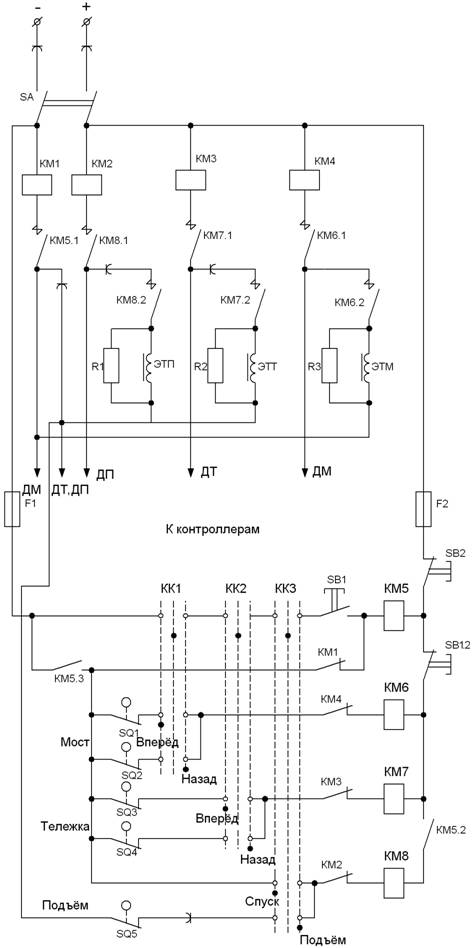
Рис. 1. Схема защитной панели типа ППЗК
В схеме панели типа ППЗК предусмотрена кнопка SB1, замыкающий контакт которой служит для включения контактора КМ5 после перерыва в работе. Второй контакт этой кнопки SB1.2 — размыкающий.
Он включен так, что предотвращает одновременное с КМ5 включение контакторов КМ6, КМ7, КМ8, нежелательное, например, при наличии короткого замыкания в цепях управления или силовой цепи. Отметим, что минимальная защита кранового электропривода при контроллерном управлении осуществляется посредством катушек линейных контакторов, тяговое усилие которых становится недостаточным для удержания контакторов во включенном состоянии при снижении напряжения сети до значений, меньших 0,8 – 0,85 номинального.
Схема 2. Контроллерное управление электроприводом переменного
тока
В качестве примера контроллерного управления асинхронным двигателем с контактными кольцами, установленным на механизме передвижения, рассмотрим схему, приведённую на рис. 2. Питание к двигателю подводится через защитную панель типа ПЗК и контроллер кулачкового типа.
Контроллер, приведенный на рис. 2, имеет симметричную схему включения. Четыре его контакта предназначены для переключений в статорной цепи, пять – в роторной. Для изменения направления вращения двигателя, реверсирующие контакты на электроприводах крановых механизмов устанавливаются в двух линейных проводах, третий подводится непосредственно к статору. Напряжение к двигателю подается через три контактных провода, другие три провода служат для связи колец ротора двигателя с регулировочным реостатом и контроллером. К статорным выводам двигателя подключается трехфазный электромагнит тормоза YB, который разводит тормозные колодки, как только на статор подается напряжение.
В приведенной схеме управления асинхронным двигателем с контактными кольцами плавный пуск и регулирование скорости достигаются постепенным поворотом маховичка контроллера вправо и влево от нулевого до пятого положения. Дополнительные сопротивления в роторной цепи при заданном положении контроллера (1-4) не равны между собой, что позволяет несколько сократить количество переключающих контактов по сравнению с симметричным включением сопротивлений.
При управлении двигателем посредством контроллера оператор должен переводить рукоятку из одного положения в другое с некоторым интервалом времени, так как в противном случае могут возникнуть недопустимые броски токов, особенно при переходе в режим противовключения.
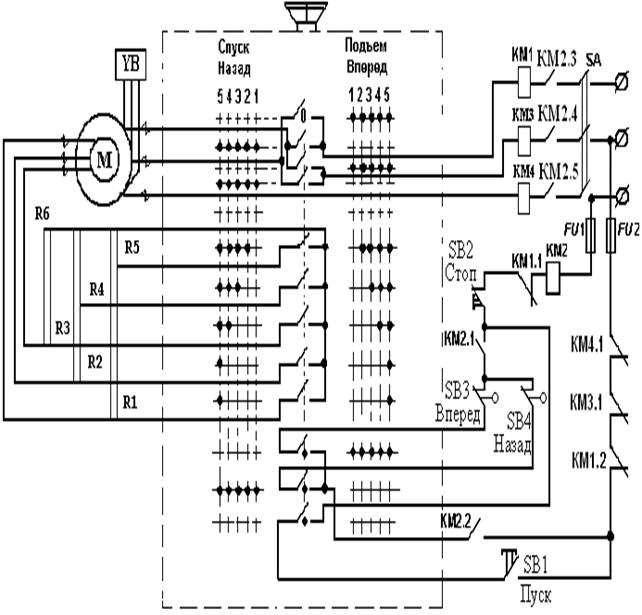
Рис. 2. Схема контроллерного управления электроприводом переменного тока
Механические характеристики асинхронного двигателя при контроллерном управлении обеспечивают вполне удовлетворительный режим работы механизмов передвижения. Для механизмов подъема они малопригодны, так как не дают возможности производить спуск грузов с малой скоростью. Вследствие указанного применение двигателей переменного тока с контроллерным управлением на механизмах подъема ограничено. Оно встречается главным образом на кранах малой и средней производительности, особенно при легком режиме работы. На крупных кранах контроллерное управление двигателем переменного тока встречаются реже, главным образом его применяют на механизмах передвижения или вспомогательного подъема.
Здесь кнопка SB1 – «Пуск», кнопка SB2 – «Стоп», SВ3 и SВ4 – конечные выключатели, КМ1, КМ3, КМ4 – реле максимального тока.
Схема 3. Схема управления двигателем последовательного
возбуждения с кулачковым контроллером
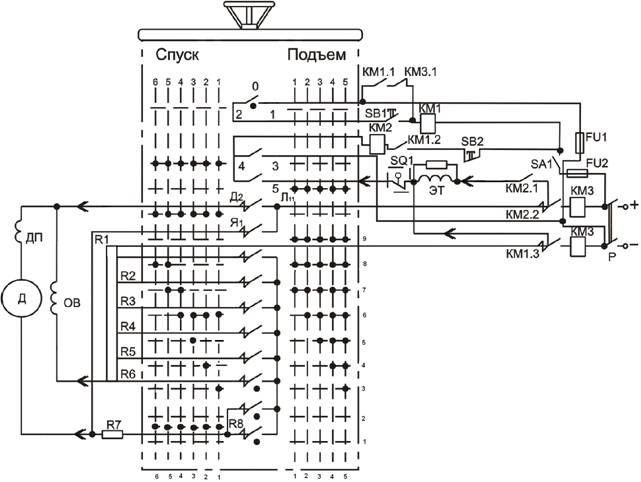
Контроллер имеет пять положений при подъеме грузов и шесть при спуске. Схема несимметричная, так как при повороте маховичка вправо и влево получаются разные регулировочные характеристики. Питание к контроллеру и двигателю подводится через защитную панель.
На рис. 3 а приведена схема включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера при подъеме и спуске грузов. Напряжение к двигателю подводится в обоих случаях через контакты контакторов КМ1, КМ2. При подъеме грузов якорь и обмотка возбуждения соединяются последовательно, и регулирование скорости производится изменением сопротивления R1 – R6. В процессе спуска грузов якорь двигателя и обмотка возбуждения включаются параллельно по так называемой схеме безопасного спуска, позволяющей осуществить низкие посадочные скорости. Р – рубильник подачи напряжения, SВ1 – кнопка «Пуск», SВ2 – кнопка «Стоп», SА1 – включение сети управления.
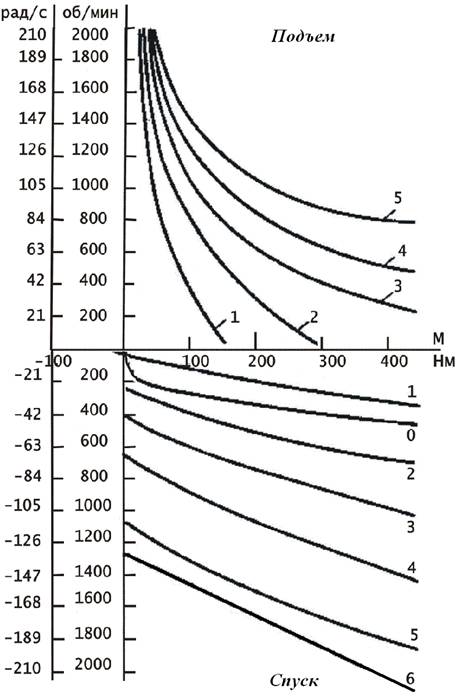
На Рис. 3 б представлен общий вид характеристик при подъеме и спуске грузов. Каждому положению контроллера соответствует определенная характеристика, имеющая то же цифровое обозначение. Характеристика 1 подъема груза соответствует первому положению контроллера и получается при зашунтированном сопротивлении R2 и введенном в цепь якоря R3-R6. На всех положениях спуска последовательно с якорем включены сопротивления R7 и R1. При опускании грузов характеристика 1 получается путем введения сопротивления R1-R3 последовательно с якорной сетью, и в цепи обмотки возбуждения. На следующих положениях контроллера последовательно вводятся дополнительные сопротивления в цепь обмотки возбуждения. Причем до положения 4 общее дополнительное сопротивление, включенное последовательно с сетью, остается неизменным (R1-R3), а, начиная, с положения 5 оно начинает выводиться. В положении 6 обмотка возбуждения включается в сеть независимо от якоря, двигатель имеет в данном случае механическую характеристику, подобную двигателю независимого возбуждения. Это исключает при соответствующем подборе сопротивлений значительное повышение скорости спуска грузов.
а
б
Рис. 3. а) Принципиальная схема управления двигателем последовательного
возбуждения с кулачковым контроллером;
б) Развернутые схемы и характеристики двигателя для различных положений
контроллера
Тяжелые грузы в случае применения схемы рис. 3 а спускаются в генераторном режиме (тормозной спуск) положения 1-6 «спуска». При этом контроллерное управление обеспечивает плавное регулирование и низкие скорости опускания груза. Когда легкие грузы не могут спускаться за счет собственного веса вследствие того, что создаваемый ими момент меньше момента трения, двигатель создает дополнительный момент, преодолевающий совместно с грузом момент трения (силовой спуск).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
