
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Перед пуском двигателей конвейеров необходимо, чтобы операторы каждого конвейера нажали кнопки готовности Sb4, Sb6. При этом промежуточные реле КМ11, КМ12 замкнут свои контакты КМ11.1, КМ12.1 в цепи реле пуска КМ1. При включении кнопки Sb2, реле КМ1 замкнет свой контакт КМ1.2 в цепи катушки линейного контактора КМ2, который, включившись, подаст питание на две фазы через ограничивающий резистор R к статорным обмоткам АПЧ и двигателей конвейеров. Эта операция необходима для того, чтобы роторы машин заняли синфазное положение, что исключает возникновение больших бросков тока и выпадение машин из синхронизма при пуске.
С выдержкой времени, обеспечивающей поворот ротора двигателей и АПЧ в синфазное положение, сработает маятниковое реле времени КМ2.5, пристроенное к контактору КМ2, контактор КМ3 при этом включится, а контактор КМ2 отключится. Частоты статорных и роторных цепей двигателей конвейеров будут одинаковыми, и двигатели останутся в неподвижном состоянии.
Вслед за контактором КМ3 с выдержкой времени, создаваемой маятниковым реле КМ3.6, которое пристроено к КМ3, включится контактор КМ4, и начнется пуск двигателя M. Контроль за пуском двигателя M осуществляется по принципу независимой выдержки времени реле КМ5, КМ6, КМ7, и контакторами ускорения КМ8, КМ9, КМ10. По окончании процесса пуска системы некоторое изменение скорости двигателей конвейеров в зависимости от требований производственного процесса можно производить путем изменения передаточного отношения вариатора. Отключение всей системы производится кнопками Sb1, Sb3, Sb5.
Схема 10. Автоматизированное управление и сигнализация поточно-транспортной системы
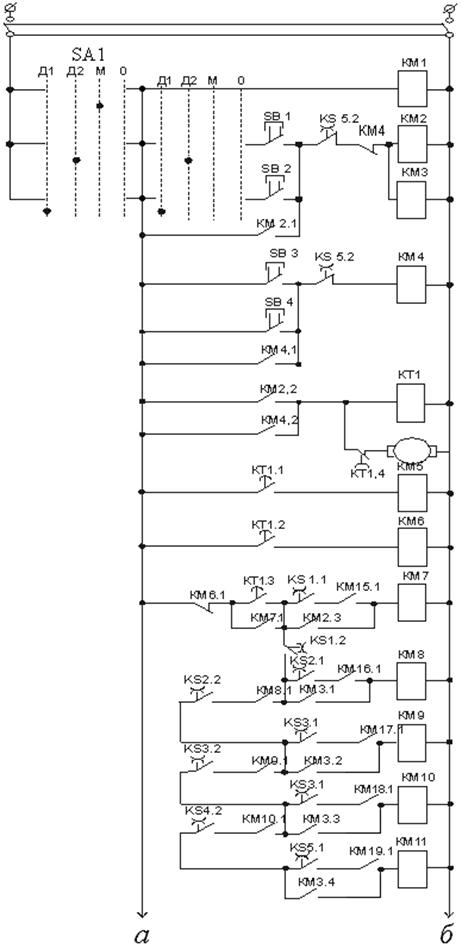
Принципиальная схема управления поточно-транспортной системы (рис. 10) позволяет осуществлять местный и централизованный режим управления, выбираемый командоконтроллером SA1 (рис. 10. а, б). При выборе местного управления (положение М) контакты командоконтроллера отключают схему дистанционного управления и подается питание на реле местного управления КМ1, через замыкающие контакты которого подготавливаются пусковые цепи пяти двигателей.
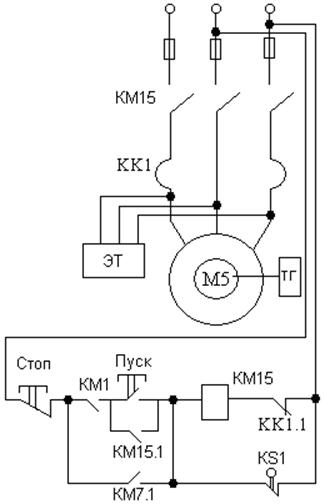
Их пуск и остановка в этом случае производятся кнопками “Пуск” и “Стоп” по месту. На рис. 10 в показаны цепи одного двигателя транспорта.
Дистанционное управление с пульта диспетчера всего производственного процесса осуществляется при положении Д2 SA1, а управление с пульта линии транспортёров при положении Д1 SA1.
Нажимая на кнопку SB1 или SB2, диспетчер подаёт командный импульс на пуск линии транспортёров. При этом получают питание реле пуска линии КМ2 и КМ3. Контакт КМ2.1 шунтирует пусковую кнопку, а КМ2.2 подает питание на моторное реле времени КТ1, которое с некоторой выдержкой времени своим контактом КТ1.3 включает промежуточное реле управления КМ7 транспортера, расположенного последним по направлению грузопотока.
Реле КМ7 контактом КМ7.1 включает контактор КМ15, который в свою очередь включает двигатель М5. После того, как двигатель достигнет номинальной скорости, установленное на транспортёре реле скорости KS1 контактом KS1.1 зашунтирует контакт КМ2.3 пускового реле, а контактом KS1.2 включит промежуточное реле КМ8. Контакт КМ8.2 подаёт питание на контактор КМ16, который включит двигатель M4. Наличие реле скорости позволяет пустить последний транспортёр только по достижении предыдущим полной скорости.
Включение двигателей следующих транспортёров осуществляется аналогично изложенному. После пуска последнего транспортёра его реле скорости KS5 отключает пусковое реле КМ2 и КМ3 контактом KS5.2, которые разомкнут контакты в цепях промежуточных реле КМ7-КМ11, что обеспечивает своевременное их отключение как при отключении соответствующих им контакторов, так и при пробуксовке ленты транспортёра, когда снижается скорость ленты и отключается соответствующее реле скорости.
При нажатии на кнопку остановки SB3 (или SB4) подаётся питание на реле остановки КМ4, контакт КМ4.1 которого шунтирует кнопку остановки. КМ4.2 включает реле времени КТ1, КМ4.3 отключает реле КМ12 блокировки пуска питателя. КМ12 отключает питатель, подающий материал на головной транспортёр, прекращая этим подачу груза.
С выдержкой времени, достаточной для полной разгрузки всех транспортёров, реле времени КТ1 своим контактом КТ1.2 подаёт питание на реле остановки линии КМ6, которое контактом КМ6.1 отключает реле КМ7-КМ11, отключающие в свою очередь контакторы КМ15-КМ19 соответствующих приводных двигателей.
Аварийная остановка без предварительной разгрузки линии осуществляется при переводе командоконтроллера SA1 в положение 0. Остановка любого двигателя возможна также при помощи кнопок “Стоп” установленных вдоль линии.
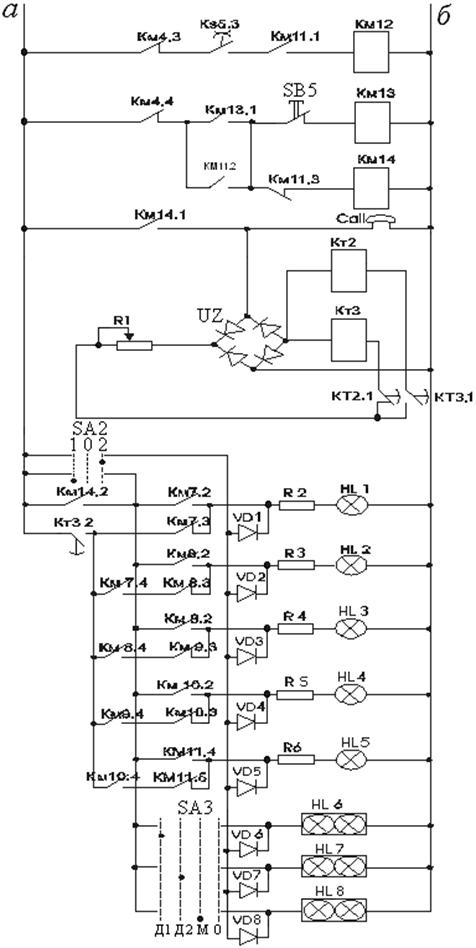
Информацию о состоянии и работе механизмов диспетчер получает при помощи схем световой и звуковой сигнализации (рис. 10 б).
а
б
в
Рис. 10. Схема автоматизированного управления и сигнализации
поточно-транспортной системы
Устройство световых табло: HL6 – управление диспетчером линии транспортёров, HL7 – управление диспетчером производственного цикла, HL8 – местный режим управления. Сигнализация работы транспортёров осуществляется лампами HL1-HL5. Кроме световой сигнализации схемы предусмотрена звуковая сигнализация звонком Call. Перед пуском линии проверяется исправность всех сигнальных ламп табло HL1-HL8 переводом командоконтроллера SA2 в положение 2. При этом лампы из-за наличия в их цепи диодов горят часто мигающим светом, что необходимо для отличия режима проверки сигнализации от рабочего режима. Затем SA2 переводят в положение 1 «Работа». По мере пуска двигателей загораются соответствующие лампы HL1-HL5 и продолжают гореть ровным светом на протяжении всего времени работы транспортёров. Возможно отключение сигнальных ламп переводом SA2 в положение 0, но аварийная сигнализация при этом сохраняется.
При аварийном отключении какого-либо транспортёра отключаются все транспортёры предшествующие аварийному, а, следовательно, КМ11 теряет питание. При этом промежуточное реле КМ11 контактом КМ11.3 включает реле КМ14 аварийной сигнализации, которое контактом КМ14.1 включает звонок Call и импульсный датчик – пульс-пару из двух реле времени КТ2 и КТ3. КТ3 питается через выпрямительный мост UZ и контактом КТ3.1 включает КТ2. Через контакт КТ3.2 периодически подаётся напряжение на шину аварийной сигнализации, вследствие чего лампа аварийного конвейера мигает с небольшой частотой, а лампы всех отключенных предыдущих конвейеров не горят. Аварийный сигнал можно отключить кнопкой SB5, контакты которой разрывают цепь катушки КМ13 сигнального блокировочного реле.
Схема 11. Управление электроприводом эскалатора
На рис. 11 б приведён один из вариантов схемы управления двигателем эскалатора метрополитена. Двигатель может быть включен (рис. 11 а) для работы на подъем и спуск соответственно контакторами КМ13 и КМ14. Включение обмотки статора двигателя в треугольник или звезду производится контакторами KM18 и KM19. Третий контактор KM15 в цепи статора обеспечивает отключение двигателя от сети в случае приваривания контактов контакторов направления KM13 и KM14.
Пуск двигателя осуществляется в четыре ступени. Пусковые сопротивления выводятся по принципу независимой выдержки времени контакторами ускорения KV1, KV2, KV3, KV4. К трем первым из них пристроены маятниковые реле времени. Остановка эскалатора при нормальном отключении двигателя происходит под действием двух электромеханических тормозов: рабочего YB1 и предохранительного YB2. Наличие последнего определяется высокими требованиями техники безопасности к установкам с большим количеством пассажиров. Кроме того, в системе имеется механический аварийный тормоз, который срабатывает при нарушении связи между двигателем и валом механизма, осуществляя торможение последнего.
В схеме предусмотрены три вида защиты двигателя: от перегрузки, коротких замыканий и обрыва фаз, которые осуществляются соответственно реле KM3; KM1; KM2 и KM4, KM5, KM6. Контроль над температурой подшипников осуществляется термическим реле KK1. В некоторых вариантах схем максимальная токовая защита и защита от перегрузки выполняются соответствующими расцепителями автомата QF.
Включение двигателя эскалатора может быть произведено в том случае, когда механическое и электрическое оборудование исправно. Для контроля состояния указанного оборудования служит ряд блокировочных и защитных аппаратов, контакты которых вводятся в одну блокировочную цепочку. Включение промежуточных контакторов KM7 или KM8 может быть произведено кнопками SB1 или SB2, если закрыты контакты промежуточных реле KM10, KM12, контакты реле контроля пуска KM11 и центробежного реле КМ20. Кроме того, должны быть закрыты контакты кнопок SB3 («Стоп») и SB4, а также конечных выключателей гребенок ступеней SQ1, SQ2, конечного выключателя поручней SQ4, конечного выключателя тяговых цепей SQ3 и т. п. Работа схемы при включении эскалатора на подъем и спуск не имеет принципиальных различий.
При работе эскалатора на подъем вслед за включением блокировочного контактора KM7 включаются контакторы KM18, KM13, KM9, KM15, которые подводят питание к статору двигателя, включенному в треугольник, а также к обмоткам предохранительного и рабочего тормозов. Контроль за процессом пуска двигателя осуществляется реле KM11, выдержка времени которого выбирается несколько большей, чем время разбега при нормальных условиях. В случае затягивания пуска реле KM11 отключает блокировочный контактор KM7 или KM8, в результате чего двигатель отключается от сети.
Нормальная остановка двигателя осуществляется нажатием на кнопку SB3 «Стоп». В аварийном режиме, так же как при воздействии на кнопку «Стоп», разрывается блокировочная цепочка вследствие открывания одного из контактов, введенных в нее. При остановке двигателя отключаются контакторы направления вращения, треугольника или звезды, контактор KM15, а затем с выдержкой времени, обусловленной реле KM16, контактор тормоза YB2, вследствие чего его колодки меньше подвергаются износу, чем у тормоза YB1. Указанная последовательность нарушается только при срабатывании центробежного реле КМ20, которое размыкает свои контакты при 130% номинальной скорости, или аварийного выключателя SB4, когда необходимо экстренное торможение.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
