

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Одним из часто встречающихся искажений сигнала являются «выбросы», т. е. импульсные помехи с большой амплитудой. Эффективным средством борьбы с ними является медианный фильтр. Он относится к непараметрическим, локальным, нелинейным и надежным методам, имеет предсказуемое время расчетов, может работать на случайной сетке ![]() . В пакете CRW-DAQ реализован пороговый медианный фильтр, доступный в виде функций на языке Object Pascal, а также в виде готового инструмента с графическим интерфейсом (Рис.11).
. В пакете CRW-DAQ реализован пороговый медианный фильтр, доступный в виде функций на языке Object Pascal, а также в виде готового инструмента с графическим интерфейсом (Рис.11).
Алгоритм  - точечного медианного фильтра с абсолютным порогом
- точечного медианного фильтра с абсолютным порогом ![]() и относительным порогом
и относительным порогом ![]() можно описать так. Для оценки значения
можно описать так. Для оценки значения![]() в точке
в точке ![]() делается выборка
делается выборка ![]() , содержащая
, содержащая ![]() точек вокруг
точек вокруг ![]() и отсортированная по возрастанию значений
и отсортированная по возрастанию значений ![]() . Вычисляется медиана
. Вычисляется медиана ![]() как значение
как значение ![]() в середине этой выборки. Если разница
в середине этой выборки. Если разница  медианы
медианы ![]() и значения
и значения ![]() превышает абсолютный или относительный порог, то в качестве оценки берется медиана
превышает абсолютный или относительный порог, то в качестве оценки берется медиана ![]() , иначе остается исходное значение
, иначе остается исходное значение ![]() :
:
| ( | 13 | ) |
Пороговый медианный фильтр хорошо удаляет «выбросы», не затрагивая неповрежденную часть сигнала, что делает его незаменимым средством обработки данных, содержащих импульсные помехи. Однако его применение в задачах управления ограничено тем, что хотя метод и локальный, он не работает при наличии причинных ограничений (4), требуя наличия данных до и после точки ![]() . В некоторых задачах online обработки медианный фильтр может применяться, если можно смириться с задержкой выдачи результата. Отметим также, что медианный фильтр не позволяет оценить значения вне узловых точек
. В некоторых задачах online обработки медианный фильтр может применяться, если можно смириться с задержкой выдачи результата. Отметим также, что медианный фильтр не позволяет оценить значения вне узловых точек ![]() , поэтому он используется в сочетании с одним из интерполяционных методов.
, поэтому он используется в сочетании с одним из интерполяционных методов.
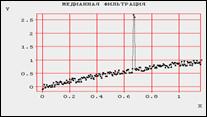
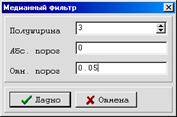
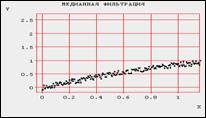
Рис.11. Медианный фильтр и пример его воздействия на сигнал.
На рисунке (Рис.11) показан пример действия медианного фильтра. Сигнал, содержащий импульсную помеху, обрабатывается 7-точечным медианным фильтром с 5% порогом, после чего импульсная помеха исчезает.
Основным инструментом для online сглаживания в пакете CRW-DAQ является набор непараметрических, линейных, локальных методов, работающих на случайной сетке xi, дающих однозначную, надежную оценку, имеющих предсказуемое время расчета. Это связано со спецификой данных, характерных для распределенных систем управления: причинные (4) и исторические ограничения (5), нерегулярная сетка (6). Хотя набор содержит нескольких методов, он «упакован» в одну функцию с 4 параметрами: ![]() .
.
Параметр ∆ задает полуширину окна сглаживания (9). Поскольку массив данных упорядочен, границы окна сглаживания находятся алгоритмом быстрого двоичного поиска (дихотомии), что резко ускоряет расчеты.
Параметр ![]() задает степень и тип алгоритма. При значении
задает степень и тип алгоритма. При значении ![]() используется взвешенное среднее интегральное значение. Оно вычисляется как
используется взвешенное среднее интегральное значение. Оно вычисляется как
| ( | 14 | ) |
 ,
, где ![]() ,
,  - некоторая положительная симметричная функция (ядро сглаживания), определенная ниже. Легко увидеть, что формула (14) является конечно-разностной аппроксимацией интегральной формулы свертки с ядром
- некоторая положительная симметричная функция (ядро сглаживания), определенная ниже. Легко увидеть, что формула (14) является конечно-разностной аппроксимацией интегральной формулы свертки с ядром ![]() по методу трапеций:
по методу трапеций:
| ( | 15 | ) |
При значении ![]() используется взвешенное среднее значение:
используется взвешенное среднее значение:
| ( | 16 | ) |
 ,
, На регулярной сетке времени, когда ![]() , взвешенное среднее эквивалентно интегральному, различие появляется лишь при неравномерной сетке.
, взвешенное среднее эквивалентно интегральному, различие появляется лишь при неравномерной сетке.
При значении ![]() используется локальная аппроксимация полиномом степени
используется локальная аппроксимация полиномом степени ![]() , рассчитанном по взвешенному МНК. Если точнее, в качестве оценки
, рассчитанном по взвешенному МНК. Если точнее, в качестве оценки ![]() принимается значение полинома
принимается значение полинома
| ( | 17 | ) |
в точке ![]() , c коэффициентами
, c коэффициентами ![]() , которые находятся минимизацией взвешенной суммы квадратов по окну сглаживания:
, которые находятся минимизацией взвешенной суммы квадратов по окну сглаживания:
| ( | 18 | ) |
 ,
, При вычислении коэффициентов полинома возникает система линейных уравнений, решаемая модифицированным методом Гаусса. Поэтому время расчета существенно больше, чем при усреднении, хотя и остается предсказуемым. Для гладких сигналов полиномы точнее, чем усреднение, но при наличии в сигнале резких «фронтов» усреднение предпочтительнее, т. к. полиномы могут давать в точках разрыва сигнала осцилляции (эффект Гиббса) [63], опасные для АСКУ, тогда как для усреднения (14,16) характерно «заглаживание» фронтов.
Параметры k1,k2 задают функцию ядра:
| ( | 19 | ) |
Такой выбор связан с тем, что при разных параметрах ![]() ,
,![]() он дает набор положительных, симметричных, непрерывных, дифференцируемых ядер, имеющих конечное число ненулевых производных. Доказано, что такие ядра имеют оптимальные свойства c точки зрения точности оценки [64]. Положительные ядра выбраны также потому, что они снижают эффект Гиббса [63,64], проявляющийся в виде осцилляций при резком изменении сигнала. Для задач управления такой «дребезг» опаснее, чем «заглаживание» фронта, которое дает положительное ядро.
он дает набор положительных, симметричных, непрерывных, дифференцируемых ядер, имеющих конечное число ненулевых производных. Доказано, что такие ядра имеют оптимальные свойства c точки зрения точности оценки [64]. Положительные ядра выбраны также потому, что они снижают эффект Гиббса [63,64], проявляющийся в виде осцилляций при резком изменении сигнала. Для задач управления такой «дребезг» опаснее, чем «заглаживание» фронта, которое дает положительное ядро.
Пакет CRW-DAQ включает также средства цифровой фильтрации и Фурье-анализа: алгоритмы быстрого (FFT) и дискретного (DFT) Фурье-преобразования, а также цифровые фильтры с конечной импульсной характеристикой (FIR, Finite Impulse Response) [63], доступные в виде функций на языке Object Pascal, а также графических утилит. Эти методы относятся к линейным, быстрым и надежным непараметрическим алгоритмам, причем FFT и DFT являются нелокальным, а FIR – локальным методом. FFT, DFT и FIR фильтры редко использовались в АСКУ, т. к. они требуют сетки xi с постоянным шагом, что не характерно для распределенных систем управления. Кроме того, они мало пригодны для online обработки, т. к. не могут обрабатывать причинно ограниченные выборки (4). Однако они полезны для offline анализа. Например, Фурье-анализ полезен для анализа спектра шума, что часто позволяет установить его источник и принять меры к его устранению.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
