


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
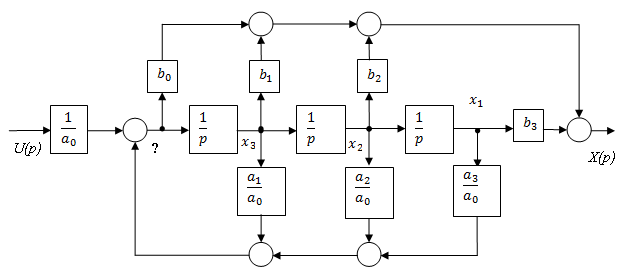
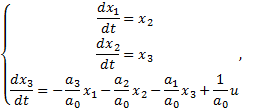
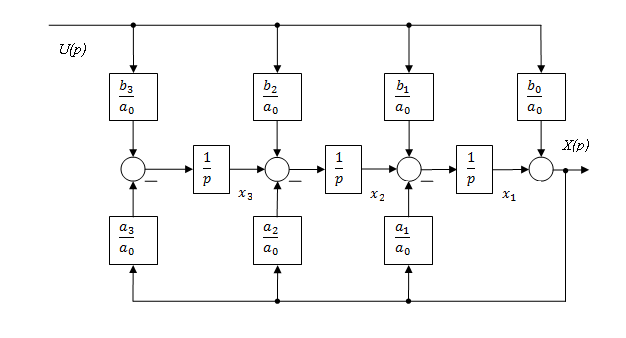
 5) На основе уравнение для старшей производной и схемы предыдущего пункта создаётся некоторая структурная схема реализации рассматриваемой передаточной функции. Уравнение для старшей производной говорит о том, что производную можно получить на основе вычитания из входного воздействия второй и первой производных, а также выходной величины, умноженных на соответствующие константы. В результате получается схема. Эту схему называют схемой в переменных состояния. Она облегчает процесс получения уравнений состояния системы.
5) На основе уравнение для старшей производной и схемы предыдущего пункта создаётся некоторая структурная схема реализации рассматриваемой передаточной функции. Уравнение для старшей производной говорит о том, что производную можно получить на основе вычитания из входного воздействия второй и первой производных, а также выходной величины, умноженных на соответствующие константы. В результате получается схема. Эту схему называют схемой в переменных состояния. Она облегчает процесс получения уравнений состояния системы.
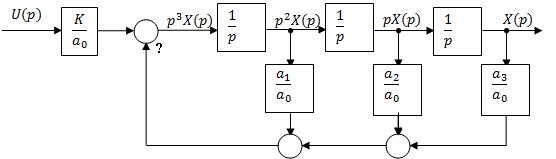
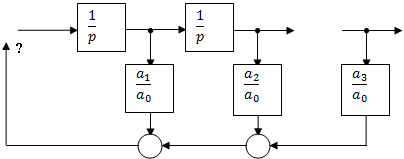
6) Выходные величины на выходах интеграторов рассматриваются в качестве переменных состояния. Обозначим их как указано на следующей схеме
|
|
|
![]()
![]()
|
 |
|
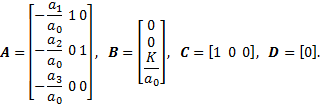
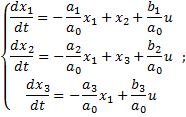
7) Записываются уравнения состояния. Для этого смотрим по схеме, как все переменные состояния формируют производные от каждой переменной состояния. В итоге получим
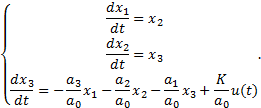
Введённые переменные состояния формируют вектор  Вектор управления здесь скалярный
Вектор управления здесь скалярный  Вектор выхода в рассматриваемом примере также скалярный
Вектор выхода в рассматриваемом примере также скалярный 
Уравнение выхода

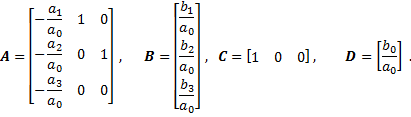
8) По полученным уравнениям записываем все необходимые матрицы

Процесс закончен.
Второй метод. Схема в переменных состояния для одной и той же передаточной функции не является единственной. В этом можно убедиться. Получим ещё одну схему для рассматриваемой передаточной функции

Ранее было записано дифференциальное уравнение, вытекающее из неё,

Его решали относительно старшей производной

и делали соответствующие выводы.
Теперь проинтегрируем данное равенство последовательно столько раз, каков порядок старшей производной, то есть три раза, получим


Последнее полученное уравнение говорит о том, как формируется выходная величина через свои интегралы. Схема в переменных состояния теперь окажется следующей
 |
Уравнения состояния по этой схеме и матрицы записываем аналогично тому, как это делалось для предыдущей, получаем
Третий метод. Рассмотренная последовательность действий позволяет успешно составить схему моделирования только по передаточным функциям достаточно простого вида, то есть имеющим вид дроби с постоянным коэффициентом в числителе. Чаще встречаются передаточные функции, содержащие в числителе многочлен относительно комплексной переменной p, например:
![]()
Запишем нашу передаточную функцию в следующем виде
![]()
Здесь просматриваются два последовательно соединённых звена. Первое – это звено из первого примера при ![]() . Второе – дифференцирующее звено, которое трижды последовательно дифференцирует выходную величину первого звена и находит их линейную комбинацию с той же выходной величиной. Поэтому можно использовать ранее полученную схему взять в ней все производные и просуммировать с соответствующими коэффициентами их и величину на выходе. В результате получится следующая схема в переменных состояния
. Второе – дифференцирующее звено, которое трижды последовательно дифференцирует выходную величину первого звена и находит их линейную комбинацию с той же выходной величиной. Поэтому можно использовать ранее полученную схему взять в ней все производные и просуммировать с соответствующими коэффициентами их и величину на выходе. В результате получится следующая схема в переменных состояния
Теперь записываем систему уравнений

Матрицы коэффициентов

Четвёртый метод. Рассматриваем ту же самую передаточную функцию
![]()
Для составления схемы в переменных состояния по такой передаточной функции поступают как в предыдущем примере.
1) Переходим к соответствующему дифференциальному уравнению


2) Решаем его относительно старшей производной выходной величины

3) Интегрируем уравнение три раза

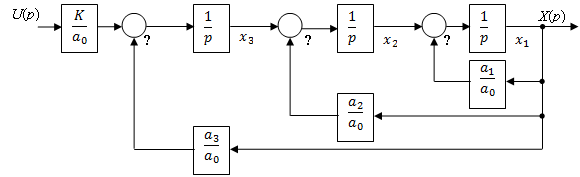
4) На основе последнего уравнения создаём схему моделирования. При этом предполагается, что выходная величина ![]() уже сформирована на выходе схемы, на её выходном сумматоре. Он суммирует входную величину
уже сформирована на выходе схемы, на её выходном сумматоре. Он суммирует входную величину ![]() , умноженную на коэффициент
, умноженную на коэффициент
![]() , с проинтегрированными необходимое число раз разностями между управляющим воздействием и выходной величиной, каждая из которых имеет свой множитель. Обратив внимание на это обстоятельство, составляем схему. Она будет следующей
, с проинтегрированными необходимое число раз разностями между управляющим воздействием и выходной величиной, каждая из которых имеет свой множитель. Обратив внимание на это обстоятельство, составляем схему. Она будет следующей
Теперь записываем систему уравнений для переменных состояния
Откуда получаем матрицы коэффициентов
Вообще говоря, существует довольно большое количество методов, на основе которых, можно получать схемы в переменных состояния. Они различны по своей сложности и трудоёмкости, но всё-таки позволяют более наглядно и менее абстрактно решать задачу получения уравнений состояния и выхода. Рассмотренные примеры это наглядно показывают.
Описание внешних воздействий дополнительными переменными состояния.
Входные воздействия тоже можно описывать переменными состояния. Не все конечно, а только те из них, которые описываются во времени известной функцией. Внешнее для системы воздействие можно рассматривать как выходную величину некоего генератора или системы, формирующих данные функции времени. Этим системам или генераторам можно поставить в соответствие математические модели в виде систем дифференциальных уравнений, поэтому основная задача заключается в умении находить их. Рассмотрим на примерах, как это делается.
1. Входное воздействие в виде ступенчатой функции.
Пусть внешнее воздействие описывается ступенчатой функцией

Определим  тогда
тогда ![]() с начальным условием
с начальным условием  На основе имеющегося дифференциального уравнения получаем схему
На основе имеющегося дифференциального уравнения получаем схему

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
