


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Метод пространства состояний в теории
непрерывных систем автоматического управления
а. Уравнения состояния
В настоящее время в теории автоматического управления широкое распространение получил метод исследования и проектирования автоматических систем, основанный на понятиях пространства состояний. Введём основные определения. Переменные  , полностью характеризующие состояние динамической системы и однозначно описывающие поведение системы при заданных входных воздействиях
, полностью характеризующие состояние динамической системы и однозначно описывающие поведение системы при заданных входных воздействиях ![]() ( j=1, 2, …, r), называются координатами состояния.
( j=1, 2, …, r), называются координатами состояния.
В общем случае имеем следующие уравнения состояния непрерывных динамических систем в векторном виде:
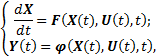
где ![]() – n-мерный вектор состояния;
– n-мерный вектор состояния; ![]() – r-мерный вектор управления;
– r-мерный вектор управления; ![]() - m-мерный вектор выхода;
- m-мерный вектор выхода;  и
и  - векторные функции.
- векторные функции.
Для непрерывной линейной динамической системы уравнения состояния принимают следующий вид:
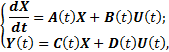
где ![]() – матрица системы размера
– матрица системы размера ![]() ;
; ![]() матрица входа размера
матрица входа размера![]()
![]() матрица выхода размера
матрица выхода размера ![]() ;
; ![]() – матрица размера
– матрица размера ![]() .
.
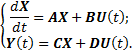
Для стационарной линейной динамической системы матрицы  постоянны и уравнения состояния запишутся в виде
постоянны и уравнения состояния запишутся в виде
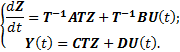
При переходе к новым переменным состояния с помощью линейного невырожденного преобразования переменных

где T – матрица преобразования  , уравнения состояния для новых переменных
, уравнения состояния для новых переменных  примут вид
примут вид
Если при переходе к новым переменным преобразование ![]() приводит матрицу
приводит матрицу ![]() к жордановой форме, то есть
к жордановой форме, то есть ![]() =J – жорданова форма матрицы
=J – жорданова форма матрицы ![]() , то последняя система называется канонической формой Жордана.
, то последняя система называется канонической формой Жордана.
Ниже рассматриваем задачу определения уравнений состояния для непрерывных линейных стационарных динамических систем с одним входом и выходом.
Уравнения состояния для системы с одним входом и выходом
Пусть линейная стационарная динамическая система описывается линейным дифференциальным уравнением

Здесь ![]() - процесс на выходе системы;
- процесс на выходе системы; ![]() - управление.
- управление.
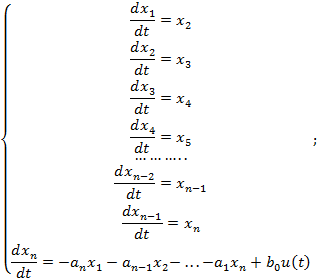
Введём переменные состояния с помощью равенств


Разберёмся в данной замене переменных более подробно. При изменении параметра i от нуля до ![]() получаем следующие новые обозначения для производных:
получаем следующие новые обозначения для производных:


![]()
![]()
![]()
……………………………………………………………….
![]()
![]()
Получили, что каждая производная от выходной величины ![]() до порядка
до порядка ![]() включительно теперь стала самостоятельной переменной состояния. Вместо исходного уравнения сейчас в новых переменных имеем систему дифференциальных из
включительно теперь стала самостоятельной переменной состояния. Вместо исходного уравнения сейчас в новых переменных имеем систему дифференциальных из  уравнений первого порядка
уравнений первого порядка

Чтобы определить матрицы матричной формы записи уравнений состояния, последнюю систему уравнений запишем так
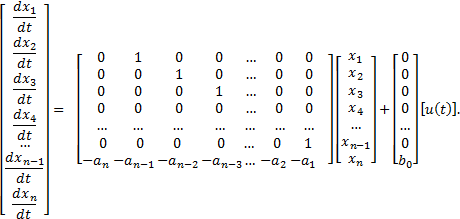
Теперь видно, что матрицы  получаются следующими
получаются следующими
A = 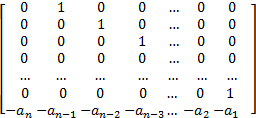 ; B =
; B = ![]() ; C =
; C =  D=
D=![]()
Получение уравненй на основе схем в переменных состояния
Рассмотренный в предыдущем параграфе путь получения уравнений состояния достаточно трудоёмок, требует постоянных аналитических преобразований. Несколько более простой окажется приводимая ниже методика, использующая промежуточные структурные схемы. Таких методик много, остановимся только на некоторых из них. Их будет достаточно для решения рассматриваемых задач.
Первый метод. Система управления описывается передаточной функцией вида

1) Необходимо перейти от передаточной функции к дифференциальному уравнению, ей соответствующему


здесь ![]() и
и ![]() - преобразования Лапласа для выходной и входной величин системы управления соответственно.
- преобразования Лапласа для выходной и входной величин системы управления соответственно.
2) Решается полученное уравнение относительно старшей производной

3) Вычерчивается цепочка последовательно соединённых интеграторов, количество их равняется порядку старшей производной (в рассматриваемом случае – 3)
 |
4) Предполагается, что на входе первого интегратора существует старшая производная ![]() Из этого предположения сразу же следует, что на выходах последующих интеграторов будут существовать производные более низких порядков
Из этого предположения сразу же следует, что на выходах последующих интеграторов будут существовать производные более низких порядков  и сама функция
и сама функция ![]()
 |  | ||
|
| ||

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
