Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Динамика разгона жесткого тела упруго сжатым стержнем при неудерживающей связи (волновая модель)
УДК 531.39; 531.64
С. Ю. Волынщиков, В. К. Манжосов
ДИНАМИКА РАЗГОНА ЖЕСТКОГО ТЕЛА УПРУГО СЖАТЫМ СТЕРЖНЕМ ПРИ НЕУДЕРЖИВАЮЩЕЙ СВЯЗИ (ВОЛНОВАЯ МОДЕЛЬ)
Представлена волновая модель процесса движения упруго сжатого стержня и жесткого тела, взаимодействующего со стержнем, с учетом неудерживающей связи. Для анализа процесса движения использован метод бегущих волн. Приведены аналитические зависимости для расчета параметров прямых и обратных волн на различных интервалах движения. Определены интервалы движения и время, когда возможен разрыв связи.
Ключевые слова: упруго сжатый стержень, жесткое тело, неудерживающая связь, волновая модель, метод бегущих волн, динамика разгона.
Для обеспечения движения твердых тел во многих механизмах ударного действия используется потенциальная энергия упругой пружины [1; 2]. Механизм взвода периодически сжимает пружину массой ![]() вместе с жестким телом (бойком) массой
вместе с жестким телом (бойком) массой ![]() и освобождает ее для разгона жесткого тела, наносящего удар.
и освобождает ее для разгона жесткого тела, наносящего удар.
При разгоне движется не только жесткое тело, но и витки пружины. На движение витков пружины затрачивается определенная доля накопленной потенциальной энергии, которая практически уже не используется для нанесения удара. При проектировании таких механических систем важно знать параметры, обеспечивающие эффективность системы. Процесс движения можно проанализировать, представляя пружину как некоторый эквивалентный по упругим свойствам стержень с распределенной по длине ![]() массой
массой ![]() , равной массе пружины.
, равной массе пружины.
Такая постановка задачи рассмотрена, в частности, в работе С. П. Тимошенко [3] при анализе колебаний стержня с грузом на торце. Решение предложено в виде бесконечного тригонометрического ряда, для которого существует проблема построения дополнительных вычислительных процедур, связанных с определением множества корней частотного уравнения, итерационными процедурами усечения ряда.
В известных работах практически не рассматриваются модели, связанные с учетом неудерживающей связи между стержнем и жестким телом, определением момента разрыва связи и состояния системы в момент разрыва.
В статье рассматривается волновой процесс движения упруго сжатого стержня и жесткого тела при неудерживающей связи, которая существует до тех пор, пока в сечении контакта стержня с жестким телом продольная деформация – деформация сжатия.
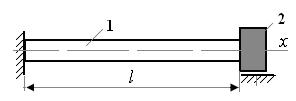 Волновая модель взаимодействия упруго сжатого стержня и жесткого тела при неудерживающей связи. Схема взаимодействия стержня 1 с жестким телом 2 представлена на рис. 1.
Волновая модель взаимодействия упруго сжатого стержня и жесткого тела при неудерживающей связи. Схема взаимодействия стержня 1 с жестким телом 2 представлена на рис. 1.
 В начальный момент времени стержень упруго сжат, его сечения неподвижны. Если исчезнет усилие Р0, удерживающее стержень в сжатом состоянии, то стержень начнет перемещать Движение поперечных сечений стержня описывается волновым уравнением
В начальный момент времени стержень упруго сжат, его сечения неподвижны. Если исчезнет усилие Р0, удерживающее стержень в сжатом состоянии, то стержень начнет перемещать Движение поперечных сечений стержня описывается волновым уравнением

 ,
,  , (1)
, (1)
где ![]() – перемещение поперечного сечения стержня, положение которого определяется координатой x;
– перемещение поперечного сечения стержня, положение которого определяется координатой x; ![]() – время; a – скорость распространения волны в материале стержня; Е – модуль упругости материала;
– время; a – скорость распространения волны в материале стержня; Е – модуль упругости материала; ![]() – время разрыва связи между стержнем и жестким телом;
– время разрыва связи между стержнем и жестким телом; ![]() – плотность материала стержня.
– плотность материала стержня.
Если стержень моделирует свойства пружины, то материал стержня – некоторый эквивалентный материал, при котором продольная жесткость стержня равна жесткости пружины:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
где ![]() – жесткость пружины; А – площадь поперечного сечения стержня;
– жесткость пружины; А – площадь поперечного сечения стержня; ![]() – масса стержня (масса пружины);
– масса стержня (масса пружины); ![]() – длина стержня.
– длина стержня.
Перемещения ![]() и скорость
и скорость ![]() поперечных сечений при
поперечных сечений при ![]() = 0 равны
= 0 равны
![]() ,
, ![]() . (2)
. (2)
Граничные условия для сечений ![]() и
и ![]() определяются равенствами
определяются равенствами
![]()
![]() ,
, ![]() (3)
(3)
а также условием существования неудерживающей связи
![]() , если
, если ![]() .
.
Решение уравнения (1) по методу бегущих волн представляется в виде суммы двух неизвестных функций [4]:
 ,
,
где  – функция, описывающая параметры волны, распространяющейся по направлению оси х (прямая волна);
– функция, описывающая параметры волны, распространяющейся по направлению оси х (прямая волна); ![]() – функция, описывающая параметры волны, распространяющейся в обратном направлении (обратная волна).
– функция, описывающая параметры волны, распространяющейся в обратном направлении (обратная волна).
Скорость поперечных сечений ![]() и продольная деформация
и продольная деформация ![]() определяются из зависимостей
определяются из зависимостей
![]()
![]() (4)
(4)
Важно отметить следующее свойство функций и  . Если t и x получают приращения
. Если t и x получают приращения ![]() и
и ![]() (причем такие, что
(причем такие, что ![]() =
= ![]() ), то
), то
f [a(t+![]() )−(x+
)−(x+![]() )] =
)] =![]() , [a(t+
, [a(t+![]() )+(x−
)+(x−![]() )] =
)] = ![]() ,
, ![]() =
= ![]() /а, (5)
/а, (5)
т. е. параметры волны деформаций ![]() и
и ![]() , распространяющихся по однородному участку стержня со скоростью
, распространяющихся по однородному участку стержня со скоростью ![]() , не изменяются.
, не изменяются.
Это свойство удобно использовать при расчете волновых состояний. Так, определив значение функции ![]() в сечении x для времени t, можно использовать это значение для сечения x +
в сечении x для времени t, можно использовать это значение для сечения x + ![]() в момент времени t +
в момент времени t + ![]() . Определив значение функции
. Определив значение функции ![]() в сечении х для времени t, можно использовать его для сечения x−
в сечении х для времени t, можно использовать его для сечения x−![]() в момент времени t +
в момент времени t + ![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)