
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 . (1.1)
. (1.1)
Момент, обусловленный деформацией, пропорционален ее величине и жесткости механической передачи ![]() :
:
![]() . (1.2)
. (1.2)
Динамический момент пропорционален моменту инерции и угловому ускорению:
![]() , (1.3)
, (1.3)
где угловые ускорение и скорость определяются по формулам:
 ; (1.4)
; (1.4) ![]() . (1.5)
. (1.5)
Момент вязкого трения, обусловленный внутренними потерями на деформацию, пропорционален скорости деформации и зависит от физических свойств материала, отображаемых коэффициентом ![]() :
:
![]() . (1.6)
. (1.6)
Момент на валу силового редуктора ![]() , приложенный в точке
, приложенный в точке ![]() , уравновешивается моментами упругости и вязкого трения, которые в свою очередь уравновешиваются моментом инерции и всеми внешними моментами:
, уравновешивается моментами упругости и вязкого трения, которые в свою очередь уравновешиваются моментом инерции и всеми внешними моментами:
 . (1.7)
. (1.7)
Уравнения (1.2) – (1.7) учитывают все связи между внутренними переменными, их производными и внешними воздействиями. Данная форма уравнений является первичной, отображает состояние системы и в современной теории управления является базовой. Представление системы дифференциальных уравнений первого порядка в компактной матричной форме позволило с развитием вычислительных средств создать чрезвычайно простые и быстрые алгоритмы их решения, что и послужило основой для разработки многочисленных пакетов прикладных программ.
По приведенным уравнениям при наличии достаточного опыта можно сразу составить структурную схему, однако для сложных систем это бывает затруднительно. Более наглядным способом анализа является вывод передаточной функции.
Переходя к преобразованиям по Лапласу уравнение для моментов (1.7) можно записать в виде:
 . (1.8)
. (1.8)
Полагая, что внешние моменты отсутствуют, т. е.  0, передаточная функция кинематической цепи по углу поворота запишется так:
0, передаточная функция кинематической цепи по углу поворота запишется так:
 . (1.9)
. (1.9)
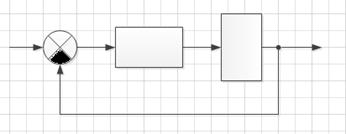
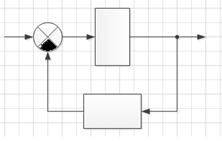
Из соотношения (1.9) непосредственно следует структурная схема замкнутой системы, приведенная на рисунке 1.3, а.
Точку приложения неучтенного внешнего момента ![]() можно определить как по уравнениям состояния, так и по размерности сигналов. Более наглядное представление дает передаточная функция по моменту нагрузки. Полагая
можно определить как по уравнениям состояния, так и по размерности сигналов. Более наглядное представление дает передаточная функция по моменту нагрузки. Полагая  , т. е. учитывая только деформацию от действия внешнего момента, получим:
, т. е. учитывая только деформацию от действия внешнего момента, получим:
 . (1.10)
. (1.10)
Структурная схема, соответствующая выражению (1.10) приведена на рисунке 1.3, б.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
а б
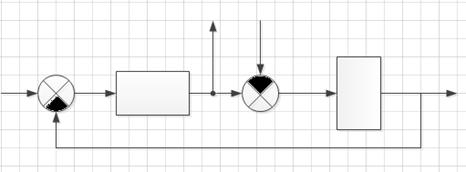
Рисунок 1.3 – Структурные схемы преобразования угла (а) и момента (б)
Топологически изображения схем на рис. 1.3 идентичны, за исключением точек приложения внешних воздействий. В окончательном виде структурная схема кинематической цепи будет иметь вид, приведенный на рис. 1.4, и позволяет независимо исследовать влияние каждого из параметров на динамические свойства кинематической цепи.
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 1.4 – Структурная схема кинематической цепи
2.2.2 Электрический двигатель постоянного тока
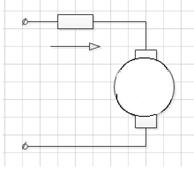
В маломощных системах автоматики в ИД постоянного тока используется якорное управление при независимом возбуждении. Рассмотрим цепь якоря (рисунок 1.5, а). Входными координатами являются напряжение управления и внешний момент нагрузки со стороны входного вала силового редуктора:
 , (1.11)
, (1.11)
где ![]() – коэффициент ЭДС, зависящий от потока возбуждения и конструктивных параметров машины, при управлении только со стороны якоря
– коэффициент ЭДС, зависящий от потока возбуждения и конструктивных параметров машины, при управлении только со стороны якоря ![]() можно считать константой;
можно считать константой;
![]() и
и ![]() – соответственно ток и сопротивление обмотки якоря.
– соответственно ток и сопротивление обмотки якоря.
Индуктивностью якорной обмотки для маломощных машин можно пренебречь. Электромагнитный момент, развиваемый двигателем,
![]() , (1.12)
, (1.12)
где ![]() – конструктивный коэффициент момента, при якорном управлении также является константой для данной машины.
– конструктивный коэффициент момента, при якорном управлении также является константой для данной машины.
Момент ![]() уравновешивается собственным моментом инерции якоря и моментом со стороны входного вала силового редуктора, который и является входным механическим воздействием на двигатель:
уравновешивается собственным моментом инерции якоря и моментом со стороны входного вала силового редуктора, который и является входным механическим воздействием на двигатель:
![]() . (1.13)
. (1.13)
Выразив скорость и ускорение вала двигателя в соответствии с формулами (1.4), (1.5), запишем уравнение (1.11) с учетом равенств (1.12), (1.13) в преобразованиях по Лапласу:
 . (1.14)
. (1.14)
Используя те же приемы, что и для кинематической цепи, можно получить передаточные функции по углу поворота и моменту:
 (1.15)
(1.15)  . (1.16)
. (1.16)
Из формул (1.15), (1.16) следует структурная схема, приведенная на рисунке 1.5, б.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() а б
а б
Рисунок 1.5 – Электрическая (а) и структурная (б) схемы
двигателя постоянного тока
Передаточная функция по углу при отсутствии внешних моментов запишется в более компактной форме:
 , (1.17)
, (1.17)
где коэффициент усиления и электромеханическая постоянная времени определяются по формулам:
 ; (1.18)
; (1.18)  . (1.19)
. (1.19)
2.2.3 Асинхронный двигатель с полым немагнитным ротором
Для асинхронного двигателя составление исходного уравнения производится с помощью схемы замещения, которая является достаточно сложной и используется для мощных машин с короткозамкнутой обмоткой типа «беличья клетка». В маломощной автоматике широкое применение имеют асинхронные двигатели с короткозамкнутым полым немагнитным ротором. Характеристики этой машины особенно при фазовом управлении близки к линейным. Семейство линеаризованных механических характеристик имеет вид, приведенный на рисунке 1.6, а. Сигнал управления ![]() может быть амплитудой или фазой. При фазовом управлении пусковой момент больше и характеристики более жесткие (имеют меньший наклон).
может быть амплитудой или фазой. При фазовом управлении пусковой момент больше и характеристики более жесткие (имеют меньший наклон).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
