
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство железнодорожного транспорта
Омский государственный университет путей сообщения (ОмГУПС)
Кафедра «Автоматика и системы управления»
РАСЧЕТ СЛЕДЯЩИХ СИСТЕМ
Расчетно-пояснительная записка к курсовому проекту
по дисциплине «Локальные системы управления»
ИНМВ.300900.000 ПЗ
Студентка гр. 23И
___________
«__»_______2016 г.
Руководитель – доцент кафедры АиСУ
___________
«__»_______2016 г.
Омск 2016
Реферат
УДК 681.51
Курсовой проект содержит: 32 листа, 28 рисунков, 3 источника.
Следящая система, ЛАХ, ФЧХ, измерители рассогласования, исполнительный двигатель, силовой привод, передаточное число, время регулирования, перерегулирование, запас устойчивости.
В данном курсовом проекте приведен расчет следящей системы с исполнительным двигателем АДП 362, представлены структурная и принципиальная схемы, рассчитаны основные элементы и характеристики основных блоков, разработана конструкция проектируемого узла.
При выполнении курсового проекта использованы электронные пакеты Microsoft Word 2010, Mathcad 2014, MATLAB R2010а, Microsoft Visio 2010.
Содержание
Задание. 4
Введение. 5
1 Построение математической модели. 6
1.1 Физическая модель следящей системы.. 6
1.2 Математическая модель. 7
1.2.1 Кинематическая схема. 7
1.2.2 Электрический двигатель постоянного тока. 10
1.2.3 Асинхронный двигатель с полым немагнитным ротором. 12
2 Динамический синтез. 14
2.1 Построение ЛАХ исходной системы.. 14
2.2 Построение желаемой логарифмической амплитудной характеристики. 18
2.3 Аналитический синтез корректирующих устройств. 21
Заключение. 31
Библиографический список. 32
Задание
Вариант – 09
Проектировать следящую систему (СС), удовлетворяющую следующим исходным условиям:
Масса объекта m = 60 кг
Кинетическая ошибка Θкин= 0,190 =0,003 рад
Скорость равномерного движения Ωравн= 0,92 рад/с
Перерегулирование σзад =30 %
Время регулирования tр = 0,13 с
Радиус выходного редуктора r = 8,5 мм = 0,0085 м
Передаточное число редуктора q = 27
При проектировании СС использовать двигатель постоянного тока АДП 362.
Параметры АДП 362
Uупр | 100 В |
MП | 17 н·см = 17·10-2 н·М |
Ωхх | 2500 об/мин = 261,8 рад/с |
Jд | 14·10-6 кг·м2 |
Введение
Следящие системы (СС) являются наиболее типичными представителями замкнутых систем автоматического управления.
Наиболее широко распространены электромеханические позиционные СС, воспроизводящие выходную величину в виде углового или линейного перемещения. Такие системы являются наиболее удобными объектами изучения, так как содержат основные типовые элементы замкнутой системы в виде отдельных конструктивных узлов. Настоящие указания посвящены методике их расчета и моделирования.
В качестве инструмента для моделирования выбран один из наиболее популярных пакетов Simulink, являющийся приложением к MatLab. Подробно рассматриваются вопросы составления модели путем перехода от исходного дифференциального уравнения к передаточной функции и структурной схеме, как более наглядным формам математической модели.
Изложение технических приемов при работе в Simulink опущено, так как они подробно изложены, например, в [3]. Особое внимание обращено на проблемы имитационного моделирования, являющиеся общими для всех программных средств. В особенности это касается моделирования нелинейных явлений, в частности сухого трения, которое является основной причиной погрешности позиционных систем повышенной точности.
2 Построение математической модели
2.1 Физическая модель следящей системы
Структурная схема скорректированной электромеханической позиционной СС приведена на рисунке 1.1.
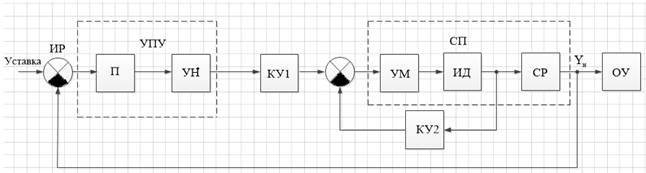
Рисунок 1.1 – Функциональная схема реальной следящей системы
Основные блоки системы: ИР – измеритель рассогласования; УПУ – усилительно-преобразующее устройство, которое состоит из преобразователя (П) и усилителя напряжения (УН) (назначение двух последних блоков – преобразовать сигнал ошибки в форму, удобную для дальнейшей обработки: коррекции, суммирования и т. д.); KУ1 и КУ2 – соответственно последовательное и параллельное корректирующие устройства; СП – силовой привод, содержащий усилитель мощности (УМ), исполнительный двигатель (ИД) и силовой редуктор (СР); ОУ – объект управления, т. е. нагрузка системы, которая в зависимости от целевого назначения СС может иметь самый различный характер.
Приведенная структурная схема содержит набор элементов, необходимый для реализации системы с высоким качеством регулирования. На практике она может быть как более сложной, так и более простой в зависимости от требований к точности, динамике, надежности и иным параметрам проектируемой системы.
В курсовой работе рассмотрим следящий привод вертикальной подачи манипулятора (рисунок 1.2), который является частью станка с числовым программным управлением. Такие системы отличаются, прежде всего, простотой в конструкции, надежностью и долговечностью в работе. Манипулятором называют механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов.
Для данной системы главной задача состоит в отработке движения некоторого входного вала выходным валом привода. При этом повторение движения выходным валом должно осуществляться с требуемой ошибкой.
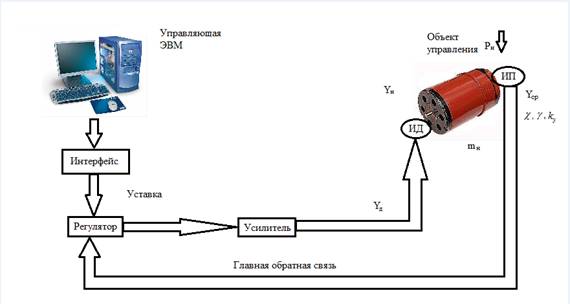
Рисунок 1.2 – Функциональная схема привода
вертикальной подачи манипулятора
На регулятор системы стабилизации поступает сигнал уставки – это сигнал, который вырабатывается интерфейсом, преобразующим цифровые сигналы с ЭВМ в последовательность импульсов. Сигнал уставки определяет частоту дискретизации сигналов для синхронной работы механизмов. Регулятор выполняет сравнение сигналов с входа и выхода, вычисляет тем самым величину ошибки и преобразует сигнал ошибки в непрерывную форму, чтобы обеспечить требуемый закон регулирования. Затем сигнал поступает на усилитель мощности, который усиливает сигнал с регулятора, так чтобы обеспечить управление двигателем.
Рассмотрим объект управления. Как известно это неизменяемая часть системы. Этот механизм представляет собой устройство захвата манипулятора. Объект управления обладает массой ![]() и весом
и весом ![]() . Объект управления и силовой редуктор образуют кинематическую цепь, которая обладает свойствами упругости
. Объект управления и силовой редуктор образуют кинематическую цепь, которая обладает свойствами упругости ![]() , жесткости
, жесткости ![]() и вязким трением
и вязким трением ![]() . Редуктор обеспечивает получение требуемого передаточного числа
. Редуктор обеспечивает получение требуемого передаточного числа ![]() . В данной курсовой работе рассматривается асинхронный электродвигатель АДП 362. Его параметры рассчитываются по паспортным данным.
. В данной курсовой работе рассматривается асинхронный электродвигатель АДП 362. Его параметры рассчитываются по паспортным данным.
2.2 Математическая модель
2.2.1 Кинематическая схема
Кинематический узел является наиболее сложной и дорогостоящей частью системы. Схема кинематического узла определяется целевым назначением системы. В рассматриваемом случае выходной координатой является поступательное движение. Выходом собственно следящей системы является выходной вал редуктора, поэтому необходимо привести все параметры кинематической цепи к координатам вращения.
Входом кинематической цепи является выходной вал редуктора силового привода с текущим значением выходной координаты ![]() . Вал редуктора представляет собой шестерню, в зацеплении с которой находится подающая рейка. Параметрами механизма подачи являются коэффициент преобразования, зависящий от передаточного числа
. Вал редуктора представляет собой шестерню, в зацеплении с которой находится подающая рейка. Параметрами механизма подачи являются коэффициент преобразования, зависящий от передаточного числа ![]() силового редуктора (СР) и радиуса его выходной шестерни r. Кроме того, любой подвижный механический узел обладает люфтом
силового редуктора (СР) и радиуса его выходной шестерни r. Кроме того, любой подвижный механический узел обладает люфтом ![]() . Кинематическая цепь между объектом и силовым элементом имеет упругость
. Кинематическая цепь между объектом и силовым элементом имеет упругость ![]() деформацию
деформацию ![]() и потери на деформацию
и потери на деформацию ![]() . Физический смысл этих коэффициентов уточним при составлении дифференциального уравнения. В направляющих механизмах возникают моменты сухого
. Физический смысл этих коэффициентов уточним при составлении дифференциального уравнения. В направляющих механизмах возникают моменты сухого ![]() и вязкого трения. Выходной координатой является положение механизма захвата
и вязкого трения. Выходной координатой является положение механизма захвата ![]() . Сила веса, приведенная к координате вращения, представлена внешним возмущающим моментом
. Сила веса, приведенная к координате вращения, представлена внешним возмущающим моментом ![]() .
.
Дифференциальное уравнение отражает физические процессы в системе и взаимосвязь между ними. Рассмотрение начнем с деформации. В общем случае это сложное явление. Есть деформация сжатия, изгиба, сдвига, скручивания. Все виды деформаций учесть практически невозможно, поэтому необходимы упрощения. В данном случае на вертикально расположенный стержень вдоль его оси действует сила тяжести объекта массой ![]() . Все виды деформаций приведут к отклонению
. Все виды деформаций приведут к отклонению ![]() от заданного значения на величину
от заданного значения на величину ![]() . Скручивание вала между точками
. Скручивание вала между точками ![]() и
и ![]() определим как разность углов входной и выходной координат:
определим как разность углов входной и выходной координат:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
