
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пусковой момент можно считать пропорциональным сигналу управления:
![]() . (1.20)
. (1.20)
Введем коэффициент скорости:
 , (1.21)
, (1.21)
где ![]() и
и ![]() – текущие значения электромагнитного момента двигателя и скорости.
– текущие значения электромагнитного момента двигателя и скорости.
При условии линейности ![]() является константой для данной машины.
является константой для данной машины.
После подстановки в формулу (1.21) выражений для электромагнитного и пускового моментов с учетом соотношений (1.13) и (1.20) и перехода к преобразованиям по Лапласу операторное уравнение имеет вид:
 . (1.22)
. (1.22)
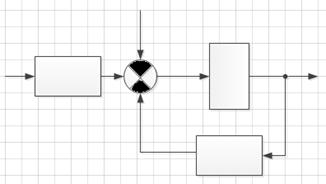
Пользуясь теми же приемами, что и для двигателя постоянного тока, можно составить структурную схему, приведенную на рисунке 1.6, б.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
а б
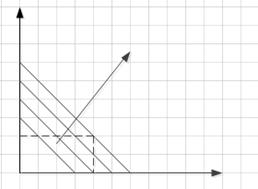
Рисунок 1.6 – Механические характеристики (а) и
структурная схема (б) асинхронного двигателя
При необходимости более компактной формы записи передаточной функции по углу в форме (1.17) рассчитываются параметры:
 ; (1.23)
; (1.23)  . (1.24)
. (1.24)
Т. е 
Все параметры модели двигателя могут быть рассчитаны по его паспортным данным. Полная структурная схема силовой электромеханической части с асинхронным двигателем, соответствующая физической модели, изображенной на рисунке 1.2, приведена на рисунке 1.7.
![]() Силовой редуктор, согласующий двигатель с объектом управления, преобразует скорость координаты вращения и момент, поэтому на схеме он отображен двумя идентичными блоками 1/
Силовой редуктор, согласующий двигатель с объектом управления, преобразует скорость координаты вращения и момент, поэтому на схеме он отображен двумя идентичными блоками 1/![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
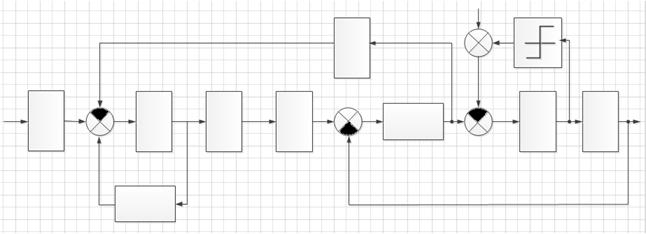
Рисунок 1.7 – Структурная схема силовой части
3 Динамический синтез
Целью динамического синтеза является определение передаточной функции системы, отвечающей заданным динамическим характеристикам. Существуют различные методы решения. Наиболее просты и наглядны частотные, их теоретической основой является связь показателей качества замкнутой системы регулирования с видом логарифмических амплитудных характеристик (ЛАХ) разомкнутой и вещественных частотных характеристик (ВЧХ) замкнутой системы [1].
Порядок решение задачи следующий:
1) построение ЛАХ исходной системы и ее моделирование;
2) построение желаемой ЛАХ;
3) синтез корректирующих цепей;
4) исследование характеристик скорректированной системы с помощью имитационной модели.
3.1 Построение ЛАХ исходной системы
Часть системы, содержащая элементы, параметры которых трудно изменяемы или заданы, называется исходной, или неизменяемой. К таким элементам относятся исполнительный двигатель, силовой редуктор и объект управления.
Динамическая ошибка при равномерном движении ![]() зависит от коэффициента усиления разомкнутой системы и не должна превышать заданной величины
зависит от коэффициента усиления разомкнутой системы и не должна превышать заданной величины ![]() , которая называется кинетической ошибкой. Значение коэффициента усиления, определенное из условия:
, которая называется кинетической ошибкой. Значение коэффициента усиления, определенное из условия:
![]() , (2.1)
, (2.1)
![]()
называется добротностью по скорости и считается неизменяемым параметром.
Рассмотрим случай, когда механическая передача является абсолютно жесткой и не имеет потерь, связанных с моментами трения. Тогда динамические свойства силового привода будут определяться только свойствами двигателя и моментом инерции нагрузки. При этом структурная схема системы значительно упрощается (рисунок 2.1, а).
При наличии только инерционной нагрузки электромеханическая постоянная времени силового привода в формулах (1.19) и (1.24) рассчитывается с учетом суммарного момента инерции, приведенного к валу двигателя:
![]() . (2.2)
. (2.2)
В случае реечной подачи в соответствии со схемой, изображенной на рис. 1.2, момент инерции, обусловленный массой объекта,
![]() , (2.3)
, (2.3)
где ![]() радиус шестерни выходного вала редуктора.
радиус шестерни выходного вала редуктора.
Электромеханическая постоянная времени:

Передаточная функция исходной системы определяется соотношением:
![]() , (2.4)
, (2.4)
где ![]() рассчитывается с учетом формулы (2.3) из уравнения (1.19) или (1.24) (в зависимости от типа двигателя). Низкочастотная асимптота ЛАХ, имеющая наклон – 20 дБ/дек, пересекает ось ординат при частоте
рассчитывается с учетом формулы (2.3) из уравнения (1.19) или (1.24) (в зависимости от типа двигателя). Низкочастотная асимптота ЛАХ, имеющая наклон – 20 дБ/дек, пересекает ось ординат при частоте ![]() равной единице, в точке
равной единице, в точке ![]() .
.
Рисунок 2.1 – ЛАХ исходной системы
Низкочастотная асимптота ЛАХ, имеющая наклон -20 дБ/дек, пересекает ось ординат при ![]() в точке
в точке 
Действительно, в низкочастотной области при ![]() << 1 постоянной времени
<< 1 постоянной времени ![]() в соотношении (2.4) можно пренебречь, следовательно,
в соотношении (2.4) можно пренебречь, следовательно,
 . (2.5)
. (2.5)
Тогда для низкочастотной асимптоты при ![]()
![]() . (2.6)
. (2.6)
На частоте 1/![]() имеется излом ЛАХ и она переходит в высокочастотную асимптоту, пересекающую ось 0 дБ под углом –40 дБ/дек.
имеется излом ЛАХ и она переходит в высокочастотную асимптоту, пересекающую ось 0 дБ под углом –40 дБ/дек.
После построения ЛАХ рассчитывается фазовая характеристика:
 , (2.7)
, (2.7)
где ![]() и
и ![]() – соответственно мнимая и действительная часть передаточной функции исходной системы.
– соответственно мнимая и действительная часть передаточной функции исходной системы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
