
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
По номограммам для рмах = 1,44 выберем LH ~ 10 дБ, LB ~ -10 дБ. Следовательно, определим значения wн и wв для среднечастотного участка:
![]()
Окончательный вид желаемой ЛАХ приведен на рисунке 2.7.

Рисунок 2.4 – Желаемая ЛАХ системы
Из точки ![]() среднечастотного участка проводится сопрягающая асимптота с наклоном 40-60 дБ/дек до пересечения с низкочастотной асимптотой.
среднечастотного участка проводится сопрягающая асимптота с наклоном 40-60 дБ/дек до пересечения с низкочастотной асимптотой.
Область высоких частот несущественно влияет на параметры системы, поэтому высокочастотные асимптоты желаемой ЛАХ проводят параллельно асимптотам исходной ЛАХ. Это упрощает синтез корректирующих устройств.
На основе теоретических сведений, и рассчитанных параметров построим ЛЧХ исходной и «желаемой» системы.
Отметим точку на частотной оси со значением ![]() , проведём через неё прямую с наклоном -20дБ/дек до пересечения с прямыми Lн = 10 дБ, Lв = -10 дБ. В точках пересечения получим значения
, проведём через неё прямую с наклоном -20дБ/дек до пересечения с прямыми Lн = 10 дБ, Lв = -10 дБ. В точках пересечения получим значения![]() и
и ![]() соответственно.
соответственно.
После точки пересечения «желаемой» ЛЧХ и прямой Lв = -10 дБ поведём прямую с наклоном -40дБ/дек. Такую же прямую проведём и из точки пересечения «желаемой» ЛАХ с прямой Lн = 10 дБ до пересечения с исходной ЛАХ. Получим значение ![]() .
.
3.3 Аналитический синтез корректирующих устройств
В общем виде структурная схема скорректированной следящей системы приведена на рисунок 2.5.
![]()
![]()
![]()
![]()
![]()
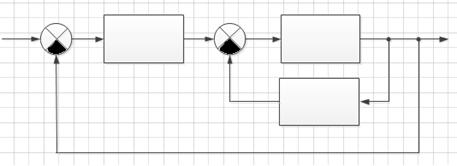
Рисунок 2.5 – Упрощенная структурная схема
скорректированной системы
Задача синтеза состоит в том, чтобы выбрать такие последовательное ![]() и параллельное
и параллельное ![]() корректирующие устройства, при которых передаточная функция разомкнутой системы соответствует желаемой:
корректирующие устройства, при которых передаточная функция разомкнутой системы соответствует желаемой:
 . (2.12)
. (2.12)
Имеется несколько способов решения задачи синтеза. Критерием выбора того или иного способа является простота реализации корректирующих устройств и физическая реализуемость системы.
Обычно проводят коррекцию отдельно для высоко - и низкочастотных областей. Высокочастотная асимптота желаемой ЛАХ проходит выше ЛАХ исходной системы (см. рисунок 2.4). Чтобы совместить высокочастотные асимптоты исходной и желаемой систем в силовых приводах обычно используется параллельная коррекция, она реализуется путем введения местной обратной связи по скорости с помощью тахогенератора, охватывающей не всю исходную систему, а только часть силового привода – усилитель мощности и двигатель, как показано на рисунке 2.6.
![]()
![]()
![]()

![]()

![]()
![]()
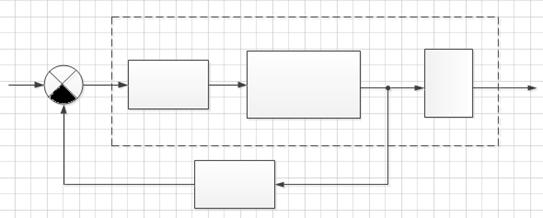
Рисунок 2.6 – Параллельная коррекция
Коэффициент усиления двигателя ![]() и суммарная постоянная времени
и суммарная постоянная времени ![]() рассчитаны ранее. Для определенности коэффициент усиления усилителя мощности
рассчитаны ранее. Для определенности коэффициент усиления усилителя мощности ![]() можно принять равным 10. Передаточная функция по скорости для усилителя и двигателя, охваченных обратной связью в соответствии с приведенной схемой (см. рисунок 2.6):
можно принять равным 10. Передаточная функция по скорости для усилителя и двигателя, охваченных обратной связью в соответствии с приведенной схемой (см. рисунок 2.6):
 , (2.13)
, (2.13)
где ![]() – коэффициент усиления тахогенератора по скорости.
– коэффициент усиления тахогенератора по скорости.
Коэффициент усиления и постоянная времени рассматриваемой части системы определяются по формулам:
![]() (2.14)
(2.14)
![]()
![]() . (2.15)
. (2.15)
Постоянная времени ![]() после параллельной коррекции должна уменьшиться по сравнению с
после параллельной коррекции должна уменьшиться по сравнению с ![]() , а низкочастотная асимптота
, а низкочастотная асимптота ![]() остаться неизменной, как показано на рисунке 2.4 штриховой линией. Для расчета требуемого значения
остаться неизменной, как показано на рисунке 2.4 штриховой линией. Для расчета требуемого значения ![]() найдем частоту сопряжения, значение которой определяется по точке пересечения низкочастотной
найдем частоту сопряжения, значение которой определяется по точке пересечения низкочастотной ![]() и высокочастотной
и высокочастотной ![]() асимптот желаемой ЛАХ. Из условия
асимптот желаемой ЛАХ. Из условия  следует:
следует:
 ; (2.16)
; (2.16) ![]() (2.17)
(2.17)
где  – пересечение
– пересечение ![]() с осью децибел при
с осью децибел при ![]() .
.
Коэффициент усиления тахогенератора определяется из формулы (2.15):
 (2.18)
(2.18)
После параллельной коррекции ЛАХ исходной системы преобразуется в ![]() , показанную на рисунке 2.4 штриховой линией. По виду
, показанную на рисунке 2.4 штриховой линией. По виду ![]() определяется передаточная функция:
определяется передаточная функция:
 . (2.19)
. (2.19)
В среднечастотной области для совмещения ![]() с желаемой ЛАХ используется последовательная коррекция. Процедура определения требуемого вида П(S) достаточно проста. Для совмещения
с желаемой ЛАХ используется последовательная коррекция. Процедура определения требуемого вида П(S) достаточно проста. Для совмещения ![]() с желаемой ЛАХ необходимо выполнение условия:
с желаемой ЛАХ необходимо выполнение условия:
![]() . (2.20)
. (2.20)
После логарифмирования соответствующих частотных характеристик в выражении (2.20) получаем:
![]() , (2.21)
, (2.21)
отсюда
![]() . (2.22)
. (2.22)
Вид логарифмических характеристик, соответствующих формулам (2.21), (2.22), представлен на рисунке 2.7, а.
По виду ![]() составляется передаточная функция и подбирается соответствующая электронная схема для ее реализации, приведенная на рисунке 2.7, б.
составляется передаточная функция и подбирается соответствующая электронная схема для ее реализации, приведенная на рисунке 2.7, б.
Рисунок 2.7. Последовательная коррекция (а) и ее реализация (б)
Передаточная функция последовательного корректирующего устройства
 . (2.23)
. (2.23)
Постоянная времени, соответствующая частоте сопряжения ![]() , низкочастотной
, низкочастотной ![]() и сопрягающей
и сопрягающей ![]() асимптот, рассчитывается аналогично уравнению (2.17):
асимптот, рассчитывается аналогично уравнению (2.17):
 , где
, где  (2.24)
(2.24)
![]() ,
, ![]() .
.
2.4 Исследование временных и частотных характеристик скорректированной системы
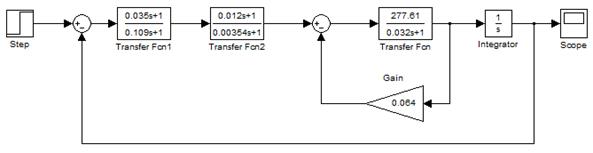
Рисунок 2.8 – Имитационная модель скорректированной системы
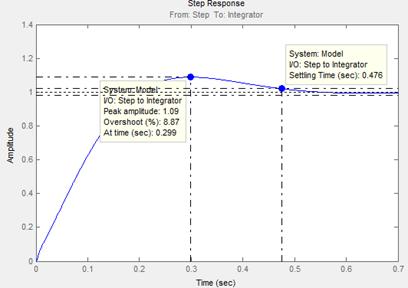
Рисунок 2.9 – Вид переходного процесса для скорректированной системы
Перерегулирование s=8,87%, время регулирования tр=0,476
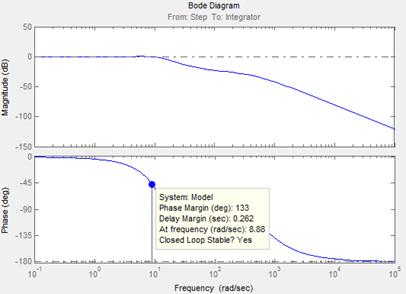
Рисунок 2.10 – Логарифмические частотные характеристики
Исходя из результатов моделирования скорректированной системы, предоставленных на рисунках 2.9 и 2.10, можно сделать вывод о том, что полученная система удовлетворяет заданным по условию требованиям и превосходит исходную систему по показателям качества.
3 Синтез корректирующих устройств в приложении SISO Design Tool
Рассматриваемое приложение входит в пакет программного обеспечения MATLAB.
Создав и импортировав данные о неизменной и изменяемой частях моделируемой системы в приложение SISO Design Tools, получим следующие рисунки. Важно отметить, что, в отличие от предыдущей модели, модель, созданная для оптимизации в приложении SISO Design Tools, содержит в себе звено запаздывания. Время запаздывания при моделировании составляло 0,058с.
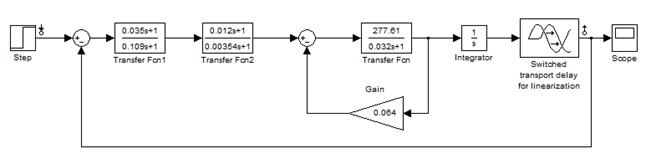
Рисунок 3.1 – Имитационная модель скорректированной системы, содержащей цепь запаздывания
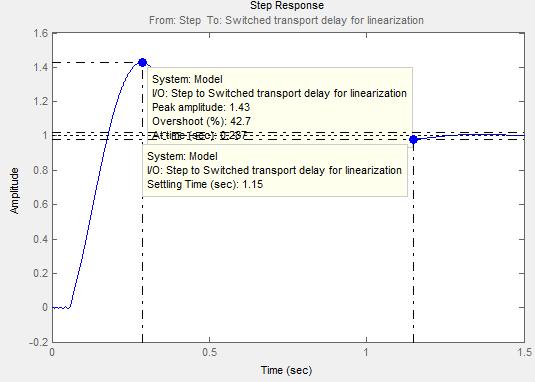
Рисунок 3.2 – Переходная характеристика системы, содержащей
блок запаздывания
Перерегулирование σ = 42,7%.
Время регулирования tр=1,15.
Эти показатели качества не удовлетворяют исходным условиям.
Следовательно, необходимо провести коррекцию системы заново.
Приложение SISO Design Tool, являющееся подпрограммой системы MATLAB, позволяет проводить коррекцию на основе корневого метода анализа качества.
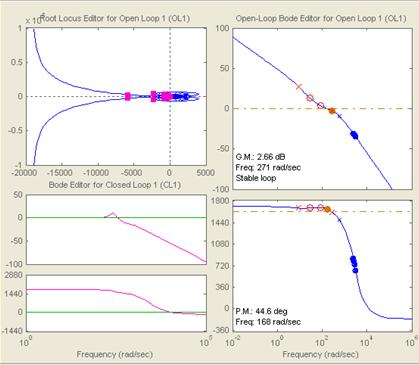
Рисунок 3.3 ‒ Скриншот из приложения SISO Design Tool системы
до коррекции
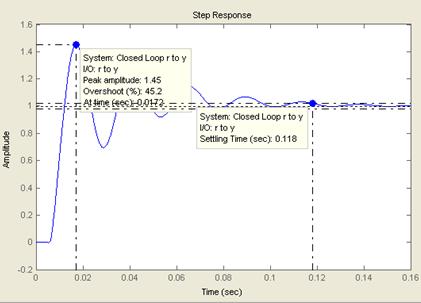
Рисунок 3.4 ‒ Скриншот из приложения SISO Design Tool системы
до коррекции

Рисунок 3.5 ‒ Окно Control and Estimation Tools Manager до коррекции
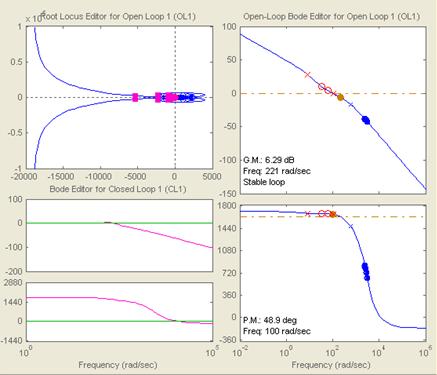
Рисунок 3.6 ‒ Скриншот из приложения SISO Design Tool системы
после коррекции
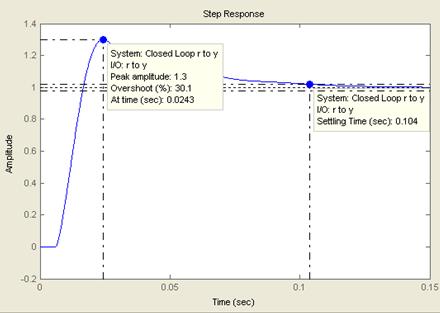
Рисунок 3.7 ‒ Скриншот из приложения SISO Design Tool системы
до коррекции
![]()
Рисунок 3.8 – Окно Control and Estimation Tools Manager после коррекции
Как видно из рисунка 3.7, для того чтобы система, содержащая цепь запаздывания, удовлетворила исходным данным проектирования, можно включить следующее последовательное корректирующее устройство:
При этом система имеет показатели качества: σ = 30,1%; tр=0,104.
Заключение
В процессе выполнения курсового проекта, рассчитана позиционная следящая система, в которой в качестве исполнительного двигателя используется асинхронный двигатель постоянного тока АДП-362.
Данный расчет содержит энергетический расчет силового привода, динамический синтез системы, корректирование системы в соответствии исходным условиям и моделирование спроектированной системы в Simulink.
На основе динамического синтеза системы выбраны последовательное и параллельное корректирующее устройства. При этом показатели качества системы: σ = 30,1%; tр=0,104.
При изучении процесса синтеза и корректирования системы, использованы: пакет Simulink, приложение SISO Design Tool.
При сравнении полученный результатов с заданными значениями (σ = 30%, tр=0,13 с) можно сделать вывод о том, что имитационная спроектированная система удовлетворяет заданным требованиям по качеству и точности.
Библиографический список
1. моделирование и расчет следящих систем. Омск, 2007.
2. , , Глущец моделирования систем автоматического моделирования и электротехнических систем в среде MatLab и Simulink: Учебное пособие. Омск 2003.
3. овременные системы управления: Учебник для вузов. М., Лаборатория Базовых Знаний. 2004. 831 с.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
