

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На правах рукописи
ФЕДОРОВ Федор Владимирович
Обоснование рациональных параметров канатных
ловителей для шахтных конвейеров
с подвесной лентой
Специальность 05.05.06 – Горные машины
Автореферат
диссертации на соискание ученой степени кандидата
технических наук
САНКТ-ПЕТЕРБУРГ
2009
Работа выполнена в государственном образовательном
учреждении высшего профессионального образования Санкт-Петербургском государственном горном институте имени (техническом университете)
Научный руководитель –
Доктор технических наук, профессор
Официальные оппоненты:
Доктор технических наук, профессор
Кандидат технических наук
Ведущее предприятие –
Защита диссертации состоится 30 декабря 2009 г. в 14 ч 30 мин на заседании диссертационного совета Д 212.224.07 при Санкт-Петербургском государственном горном институте имени (техническом университете) по адресу: 199106 Санкт-Петербург, 21-линия, ауд. 7212.
С диссертацией можно ознакомиться в библиотеке Санкт-Петербургского государственного горного института.
Автореферат разослан 27 ноября 2009 года
Ученый секретарь
диссертационного совета
д. т.н., профессор В. В. ГАБОВ
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. В соответствии с правилами безопасности на горных предприятиях все наклонные ленточные конвейеры с углом наклона более 6 градусов, подъемные, уклонные и бремсберговые подземные конвейеры, а также ленточные конвейеры поверхностного комплекса шахт и рудников должны быть оборудованы техническими средствами для улавливания лент в случае их обрыва в процессе эксплуатации. Аналогичное требование предъявляется к наклонным ленточным конвейерам на дробильно-сортировочных заводах, обогатительных и агломерационных фабриках горно-металлургической, нерудной и других отраслей промышленности.
Для существующих и разрабатываемых конвейеров с подвесной лентой отсутствуют эффективные конструкции улавливающих устройств. Их недостатки: ограниченная величина тормозного усилия, что связано с увеличением числа ловителей и соответственно увеличением капитальных затрат и эксплуатационных расходов для поддержания их в работоспособном состоянии, и невозможностью обеспечения их синхронного срабатывания; возможность разрыва ленты при одностороннем захвате поперечно смещенной ленты.
Это вызывает снижение надежности улавливания при увеличенных материальных затратах, связанных с установкой и обслуживанием системы улавливающих устройств. Для конвейеров с подвесной лентой эффективные улавливающие устройства отсутствуют, в связи с этим есть необходимость их конструктивной разработки с обоснованием и оптимизацией параметров.
Цель работы заключается в установлении закономерностей формирования тормозного усилия в зависимости от параметров улавливающего устройства канатного типа, продольного и поперечного профиля загруженной ленты в зоне ее взаимодействия с рабочим органам ловителя для разработки методики расчета и выбора его параметров, что позволяет повысить надежность срабатывания улавливающих устройств, эффективность и безопасность эксплуатации конвейеров с подвесной лентой на горных предприятиях.
Идея работы заключается в том, что параметры улавливающего устройства канатного типа для конвейеров с подвесной лентой выбираются на основе сравнительного анализа тормозных характеристик при различных сочетаниях поперечного и продольного профилей конвейерной ленты и поперечного профиля рабочего органа улавливающего устройства, различных натяжениях конвейерной ленты и степени ее заполнения транспортируемым грузом в зоне ее взаимодействия с рабочим органом ловителя.
В соответствии с поставленной целью необходимо решить следующие задачи исследования:
1. Выполнить анализ существующих конструкций улавливающих устройств конвейеров и принципов их действия, произвести анализ литературных и патентных источников по данной проблематике.
2. Разработать стенд и методику экспериментального исследования параметров канатного улавливающего устройства.
3. Выполнить экспериментальные исследования канатного улавливающего устройства для установления закономерностей формирования тормозного усилия в зависимости от конструктивных параметров улавливающего устройства, продольного и поперечного профиля конвейерной ленты и ее заполнения транспортируемым грузом.
4. Обосновать компоновочную схему и конструкцию улавливающего устройства с оптимизированными конструктивными параметрами.
5. Уточнить математическую модель системы улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой при использовании ловителей с канатно–петлевым рабочим органом.
6. Разработать методику расчета и выбора параметров улавливающего устройства канатного типа для конвейеров с подвесной лентой.
Методы исследований: В основу проведенных исследований положен системный подход к изучаемому объекту. При решении поставленных задач использован комплексный метод исследований, включающий патентно-информационный анализ, анализ существующих конструкций и методик расчета улавливающих устройств, теоретический анализ с использованием методов классической теоретической механики и экспериментальные исследования на лабораторной модели.
Научные положения, выносимые на защиту:
1. Уточнена математическая модель улавливающего устройства канатно-петлевого типа с установлением аппроксимируемых линейными и экспоненциальными уравнениями функциональных связей между величиной тормозного усилия, обратным смещением ленты при срабатывании ловителя, поперечной и продольной деформацией лотка конвейерной ленты в зоне ее взаимодействия с рабочим органом ловителя, его поперечным профилем в момент захвата ленты и ее натяжением.
2. Экспериментально установлено, что тормозное усилие при максимальной загрузки лотка ленты транспортируемым грузом 250 кг/м, при значениях коэффициента обхвата рабочим органом ловителя лотка ленты от 0,865 до 0,925 и деформации лотка ленты ловителем в вертикальной плоскости от 0 до 100 мм изменяется в пределах от 0,52 кН до 21,55 кН, что свидетельствует об эффективности предлагаемой конструкции ловителя.
Научная новизна работы заключается в установлении закономерностей формирования величины тормозного усилия при улавливании оборвавшейся ленты наклонного конвейера с подвесной лентой с использованием ловителей канатно-петлевого типа, что позволяет оценить величину тормозного пути при затормаживании ленты и минимизировать нагрузки на конвейерную ленту и рабочие органы улавливающего устройства оптимизацией конструктивных параметров улавливающего устройства.
Обоснованность и достоверность научных положений подтверждается лабораторными экспериментальными исследованиями на полномасштабном стенде и статистической обработкой экспериментальных данных с использованием стандартных методик.
Практическая значимость работы:
1. Предложена технически эффективная конструктивная схема улавливающего устройства канатного типа для конвейера с подвесной лентой, позволяющая надежно улавливать оборвавшуюся ленту наклонного конвейера с подвесной лентой при минимальном тормозном пути и максимальной величине тормозного усилия.
2. Разработана методика расчета и выбора параметров улавливающего устройства канатного типа для конвейеров с подвесной лентой.
3. Разработан алгоритм и программа на его основе для расчета улавливающего устройства канатного типа, рекомендации по их расстановке по грузонесущей ветви тягово-несущего контура конвейера в зависимости от его продольного профиля и выбору необходимого их количества для конвейеров с подвесной лентой.
Апробация работы. Основные положения и результаты работы докладывались и обсуждались:
· на конференциях «Полезные ископаемые России и их освоение» в 2006, 2007, 2008 годах в СПГГИ (ТУ);
· на 5-ой Международной научно-практической конференции «Освоение минеральных ресурсов Севера: проблемы и решения», Воркута 11-13 апреля 2007г.;
· на научной конференции «Неделя горняка – 2008», Москва (МГГУ) 28.01.-01.02.2008г.
Личный вклад автора:
· разработана уточненная математическая модель системы улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой;
· предложена технически эффективная конструктивная схема улавливающего устройства канатного типа для конвейера с подвесной лентой, исключающая возможность дополнительного разрыва поперечно смещенной ленты;
· разработан и изготовлен экспериментальный стенд для исследования параметров улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой, выполнены экспериментальные исследования на нем;
· установлены закономерности формирования тормозного усилия при улавливании оборвавшейся ленты наклонного конвейера с подвесной лентой улавливающим устройством канатного типа.
Публикации: По результатам диссертационной работы опубликовано 7 работ, в том числе 4 патента РФ на изобретения. Из них 2 статьи опубликованы в изданиях, рекомендованных «Перечнем ведущих рецензируемых научных журналов и изданий, в которых должны быть опубликованы основные научные результаты диссертаций на соискание ученых степеней доктора и кандидата наук» Высшей аттестационной комиссии.
Структура и объем работы: диссертация состоит из введения, четырех глав, заключения и приложений. Работа изложена на 112 страницах, содержит 33 иллюстрации, 4 таблицы, список литературы из 98 наименований.
Содержание работы
Во введении показана актуальность, цель, задачи работы, сформулирована ее идея, научная новизна и практическая значимость работы.
В первой главе выполнен обзор литературных источников, проведен анализ общих характеристик современных ленточных конвейеров с подвесной лентой, проведен анализ существующих конструкций улавливающих устройств для ленточных конвейеров, рассмотрены их основные проблемы и направления совершенствования. Сформулирована цель и задачи исследования.
Во второй главе предложена классификация улавливающих устройств, обоснована конструктивная схема улавливающего устройства канатно-петлевого типа, уточнена математическая модель процесса улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой.
В третьей главе приведено описание экспериментального стенда и методики проведения исследований, выполнены исследования параметров канатно-петлевого ловителя для конвейеров с подвесной лентой и определена зависимость тормозного усилия от степени загрузки конвейерной ленты транспортируемым грузом, натяжения ленты, поперечного профиля лотка грузонесущей ветви ленты и поперечного профиля рабочего органа ловителя, проведена обработка экспериментальных данных с рекомендациями по выбору рациональных параметров улавливающего устройства.
В четвертой главе разработаны рекомендации по проектированию улавливающих устройств канатно-петлевого типа для конвейеров с подвесной лентой, разработан алгоритм и описана программа для расчета улавливающего устройства канатного типа, выбора необходимого их количества и расстановке по трассе конвейера для конвейеров с подвесной лентой.
В заключении даны основные выводы, научные и практические результаты работы.
защищаемые научные положения
1. Уточнена математическая модель улавливающего устройства канатно-петлевого типа с установлением аппроксимируемых линейными и экспоненциальными уравнениями функциональных связей между величиной тормозного усилия, обратным смещением ленты при срабатывании ловителя, поперечной и продольной деформацией лотка конвейерной ленты в зоне ее взаимодействия с рабочим органом ловителя, его поперечным профилем в момент захвата ленты и ее натяжением.
В настоящее время все большее распространение получают конвейеры с подвесной лентой (КсПЛ), которые, имея преимущества, приходят на смену ленточным конвейерам на роликоопорах. По правилам безопасности на горных предприятиях все наклонные ленточные конвейеры с углом наклона более 6 градусов должны быть оборудованы техническими средствами для улавливания лент в случае их обрыва в процессе эксплуатации. В связи с этим возникает проблема улавливания оборвавшейся конвейерной ленты наклонных конвейеров с подвесной лентой, т. к. имеющиеся типы улавливающих устройств для ленточных конвейеров на роликоопорах, ввиду их конструктивных особенностей, невозможно использовать для конвейеров нового образца, а имеющиеся конструкции улавливающих устройств малоэффективны и сложны в обслуживании. Их основные недостатки – малая величина тормозного усилия, невозможность обеспечения их синхронного срабатывания, необходимость использования датчиков обрыва ленты, возможность дополнительного разрыва ленты при одностороннем захвате поперечно смещенной ленты. В связи с этим есть необходимость в конструктивной разработке с обоснованием и оптимизацией параметров новых улавливающих устройств для конвейеров с подвесной лентой.
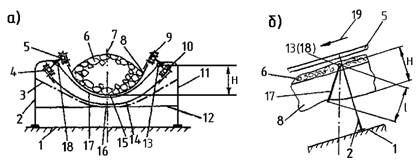
Рис. 1. Схема КсПЛ с канатным ловителем
1 – плоскость наклонного участка конвейера; 2, 11 - стойки; 3, 12 – варианты поперечных связей; 4- кронштейны; 5, 10 – направляющие; 6 – транспортируемый груз; 7 – продольная ось;8 – грузонесущая ветвь; 9 – ходовые катки; 16 – минимальный зазор; 13, 18 – точки крепления ловителя; 14 – нерабочая ветвь; 15 – постоянный минимальный зазор; 17 – гибкий элемент; 19 – направление движения ленты после обрыва; l – стрела провеса гибкого элемента; H – стрела провеса грузонесущей ветви
Улавливание оборвавшейся конвейерной ленты канатным ловителем достигается тем, что на наклонном конвейере с подвесной лентой, между грузонесущей и нерабочей ветвями ленты размещены гибкие элементы, свободные концы которых закреплены на стойках конвейера (Рис. 1.). После обрыва ленты рабочая ветвь под действием веса самой ленты и веса транспортируемого груза начинает скатываться вниз и вместе с ней относительно точек крепления ловителя под действием силы тяжести начнут проворачиваться гибкие элементы. После входа в контакт с грузонесущей ветвью ленты за счет возникших между ними сил трения гибкие элементы будут продолжать проворачиваться, подпирая грузонесущую ветвь ленты снизу при все увеличивающимися силами трения. Под действием этих сил трения происходит улавливание грузонесущей ветви ленты. Скатывающаяся вниз нерабочая ветвь ленты, которая имеет практически нулевое натяжение, немного провисает. За счет минимального зазора нерабочая ветвь ленты входит в контакт с поперечными связями, по которым она начинает перемещаться, в результате чего также затормаживается. Таким образом происходит улавливание обеих ветвей ленты после ее обрыва.
Процесс улавливания конвейерной ленты при размещении натяжного барабана в хвостовой части конвейера может быть описан следующим дифференциальным уравнением:
 , (1)
, (1)
где т'к — приведенная масса поступательно движущихся элементов грузовой или холостой ветви, кг; dv — приращение скорости движения ленты, м/с; dt — приращение времени, с; Т — натяжное усилие, постоянно создаваемое тележечным натяжным устройством, приходящееся на один ловитель, Н; ∑W" — статические сопротивления движению грузовой или холостой ветви при скатывании ленты, Н; WТ(l) — тормозное усилие, создаваемое ловителем, Н; l — текущая координата тормозного пути, м.
Ориентировочное значение Т можно получить, зная натяжное усилие конвейера Тк и прогнозируемое (ожидаемое) число ловителей nл, которые будут установлены на конвейере:
![]() ,
,
где Кн — коэффициент, учитывающий неравномерность захвата ленты при ее улавливании несколькими (nл) ловителями, Кн > 1.
Начальная приведенная масса для грузовой и холостой ветвей:
 ; (2)
; (2)
 , (3)
, (3)
где L — длина участка ленты, улавливаемая одним ловителем, м.
Статические сопротивления движению улавливаемого участка грузовой ветви при скатывании ленты:
 ; (4)
; (4)
для улавливаемого участка холостой ветви:
![]() , (5)
, (5)
где q, qл, qр – линейная масса груза, ленты и вращающихся частей роликоопор соответственно, кг/м; β – угол наклона конвейера, град.
Уравнение, описывающее процесс улавливания оборвавшейся ленты, одинаково для конвейеров, транспортирующих груз как вверх, так и вниз. Характер процесса отличается лишь начальной скоростью движения ленты v0. При работе конвейера на подъем груза в зависимости от типа ловителя может быть v0 = 0 или v0 = -vл; при транспортировании груза вниз v0 = vл, где vл – скорость движения конвейерной ленты при установившемся режиме работы конвейера, м/с.
Решение дифференциального уравнения (1) возможно лишь при известной функции WТ(l) , для определения которой необходимо выполнить экспериментальные исследования работы ловителей канатного типа.
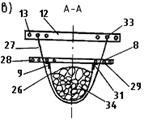
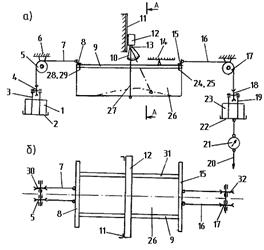
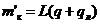
Рис. 2. Лабораторный стенд. 1, 23 – сменные грузы; 2, 22 – полки; 3, 19 – подвижные обоймы; 4, 18 – блоки; 5, 17, 30, 32 – отклоняющие блоки; 6 - рама; 7, 16 – гибкий элемент; 8, 15 – поперечные балки; 9, 31 – продольные балки; 10 – угломерный прибор; 11 – вертикальные направляющие; 12 – ползун; 13, 33 – разъемные соединения на ползуне; 14 – линейка; 20 – гибкий элемент; 21 – динамометр; 24, 25, 28, 29 – разъемные соединения ленты; 26 – конвейерная лента; 27 – петлевой участок канатного ловителя; 34 – проба груза
Для решения задачи установления закономерностей формирования тормозного усилия, обеспечиваемого единичным канатным ловителем, поперечной деформацией лотка ленты в зоне его взаимодействия с рабочим органом ловителя в зависимости от тормозного пути и поперечного профиля рабочего органа ловителя в момент захвата ленты, были проведены экспериментальные исследования на полномасштабном стенде с шириной конвейерной ленты 800 мм (рис.2, 3).
 Методика исследования заключается в следующим. С помощью разъемных соединений 24, 25, 28, 29 продольные балки 9 и 31 закрепляются на поперечинах 8 и 15 таким образом, чтобы поперечный профиль лотка отрезка ленты 26 соответствовал профилю моделируемого ленточного конвейера. Лоток, формированный отрезком ленты 26, заполняют пробой транспортируемого груза 34 в соответствии с загрузкой моделируемого конвейера. На полках 2 и 22 размещают сменные грузы 1 и 23 одинакового веса. При этом вес каждого груза 1, 23 выбирают в соответствии с продольным рабочим натяжением грузонесущей ветви ленты моделируемого наклонного ленточного конвейера. После размещения на полках 2, 22 сменных грузов 1, 23 отрезок ленты 26 принятой длины с пробой транспортируемого груза 34 на нем оказывается размещенным между двумя опорами (отклоняющими блоками 5, 30 и 17, 32), что имитирует соответствующий пролет грузонесущей ветви ленты моделируемого конвейера. Затем концы стального проволочного каната 27, являющегося рабочим органом улавливающего устройства, закрепляются на ползуне 12 путем соответствующего смещения в горизонтальной плоскости по ползуну 12 и фиксации на нем разъемных соединений 13 и 33, а сам ползун 12 смещают относительно вертикальных направляющих 11 рамы 6 таким образом, чтобы петлевой участок, сформированный из стального проволочного каната 27 с зазором охватывал снаружи лоток ленты 26, а нижней своей частью касался отрезка ленты 26 снизу. В зависимости от поставленной задачи экспериментальных исследований петлевой участок стального проволочного каната 27 может перед началом эксперимента размещаться с предварительной деформацией лотка ленты 26 снизу, с фиксацией величины стрелы предварительного прогиба ленты 26 вверх. После этого с помощью привода дополнительный гибкий элемент 20 натягивают с усилием, обеспечивающим смещение отрезка ленты 26 слева направо. При этом одновременно фиксируют величину горизонтального смещения отрезка ленты 26 по линейке 14, отклонение петли стального проволочного каната 27 (на рис. 2. (а) положение канта 27 и измененный продольный профиль отрезка ленты 26 показан штрих - пунктиром) по угломерному прибору 10 и величину натяжения дополнительного гибкого элемента 20 по динамометру 21.
Методика исследования заключается в следующим. С помощью разъемных соединений 24, 25, 28, 29 продольные балки 9 и 31 закрепляются на поперечинах 8 и 15 таким образом, чтобы поперечный профиль лотка отрезка ленты 26 соответствовал профилю моделируемого ленточного конвейера. Лоток, формированный отрезком ленты 26, заполняют пробой транспортируемого груза 34 в соответствии с загрузкой моделируемого конвейера. На полках 2 и 22 размещают сменные грузы 1 и 23 одинакового веса. При этом вес каждого груза 1, 23 выбирают в соответствии с продольным рабочим натяжением грузонесущей ветви ленты моделируемого наклонного ленточного конвейера. После размещения на полках 2, 22 сменных грузов 1, 23 отрезок ленты 26 принятой длины с пробой транспортируемого груза 34 на нем оказывается размещенным между двумя опорами (отклоняющими блоками 5, 30 и 17, 32), что имитирует соответствующий пролет грузонесущей ветви ленты моделируемого конвейера. Затем концы стального проволочного каната 27, являющегося рабочим органом улавливающего устройства, закрепляются на ползуне 12 путем соответствующего смещения в горизонтальной плоскости по ползуну 12 и фиксации на нем разъемных соединений 13 и 33, а сам ползун 12 смещают относительно вертикальных направляющих 11 рамы 6 таким образом, чтобы петлевой участок, сформированный из стального проволочного каната 27 с зазором охватывал снаружи лоток ленты 26, а нижней своей частью касался отрезка ленты 26 снизу. В зависимости от поставленной задачи экспериментальных исследований петлевой участок стального проволочного каната 27 может перед началом эксперимента размещаться с предварительной деформацией лотка ленты 26 снизу, с фиксацией величины стрелы предварительного прогиба ленты 26 вверх. После этого с помощью привода дополнительный гибкий элемент 20 натягивают с усилием, обеспечивающим смещение отрезка ленты 26 слева направо. При этом одновременно фиксируют величину горизонтального смещения отрезка ленты 26 по линейке 14, отклонение петли стального проволочного каната 27 (на рис. 2. (а) положение канта 27 и измененный продольный профиль отрезка ленты 26 показан штрих - пунктиром) по угломерному прибору 10 и величину натяжения дополнительного гибкого элемента 20 по динамометру 21.
Стенд позволяет в широких пределах изменять сочетания типов конвейерных лент, поперечного профиля лотка ленты и ее предварительного натяжения, при различном заполнении лотка ленты пробой транспортируемого груза, его крупности и углах откоса, имитирующих размещение груза на движущейся конвейерной ленте величине предварительной деформации лотка ленты петлевым участком стального канатного ловителя. Зафиксированные динамометром натяжения дополнительного гибкого элемента моделируются с учетом соответствующих масштабных коэффициентов значения тормозных усилий, развиваемых улавливающим устройством в процессе затормаживания оборвавшейся ленты наклонного конвейера фиксированной длины, а величина смещения отрезка ленты характеризует быстродействие срабатывания ловителя.
Полученные экспериментальным путем показатели, отнесенные к линейной массе отрезка ленты с транспортируемым грузом, являются удельными значениями, которые позволяют обоснованно выбирать параметры единичного улавливающего устройства и необходимое количество этих устройств для установки на наклонном ленточном конвейере с подвесной лентой с заданными длиной, углом наклона, линейной нагрузкой и другими параметрами.
В первой серии экспериментов (рис. 4., рис. 5., рис. 6.) фиксировалась нулевая загрузка конвейерной ленты грузом, т. е. имитировался обрыв и улавливание ленты на наклонном конвейере с подвесной лентой без груза, а так же при линейных массах груза 50 кг/м; 70 кг/м; 75 кг/м. Было установлено, что возрастание массы груза на ленте существенно меняет тормозные показатели, тогда как использование различных сыпучих грузов при одинаковых линейных массах и числа прокладок в ленте от 3 до 6, незначительно сказываются на тормозных показателях. Большинство конвейеров работают с лентами, у которых количество прокладок лежит в этом диапазоне. В итоге применялась лента типа БКНЛ-65 шириной 800 мм. Эксперименты проводились при различных расстояниях между бортами ленты, натяжениях ленты, коэффициентах обхвата ловителем ленты:
![]() ,
,
где ![]() - длина дуги обхвата ленты канатным ловителем, мм;
- длина дуги обхвата ленты канатным ловителем, мм; ![]() - ширина конвейерной ленты, мм.
- ширина конвейерной ленты, мм.
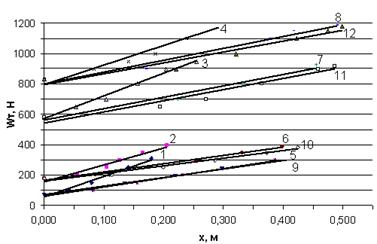
Рис. 4. Графики зависимостей тормозного усилия Wт от смещения ленты x (до срабатывания ловителя) при нулевой загрузки лотка конвейерной ленты грузом. При расстоянии между бортами ленты b = 0,65 м (kоб =0,925): 1 – натяжение ленты S = 75 Н; 2 – S = 175 Н; 3 – S = 580 Н; 4 – S= 830 Н; при b = 0,35 м (kоб =0,89): 5 – S = 75 Н; 6 – S = 175 Н; 7 – S = 580 Н; 8 – S = 830 Н; при b = 0,25 м (kоб =0,865): 9 – S = 75 Н; 10 – S = 175 Н; 11 – S = 580 Н; 12 – S = 830 Н
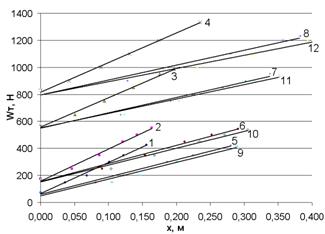
Рис. 5. Графики зависимостей тормозного усилия Wт от смещения ленты x (до срабатывания ловителя) при линейной массе груза 50 кг/м. При расстоянии между бортами ленты b = 0,65 м (kоб =0,925): 1 – натяжение ленты S = 75 Н; 2 – S = 175 Н; 3 – S = 580 Н; 4 – S= 830 Н; при b = 0,35 м (kоб =0,89): 5 – S = 75 Н; 6 – S = 175 Н; 7 – S = 580 Н; 8 – S = 830 Н; при b = 0,25 м (kоб =0,865): 9 – S = 75 Н; 10 – S = 175 Н; 11 – S = 580 Н; 12 – S = 830 Н
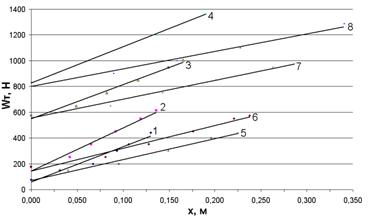
Рис. 6. Графики зависимостей тормозного усилия Wт от смещения ленты x (до срабатывания ловителя) при линейной массе груза 70 кг/м. При расстоянии между бортами ленты b = 0,65 м (kоб =0,925): 1 – натяжение ленты S = 75 Н; 2 – S = 175 Н; 3 – S = 580 Н; 4 – S= 830 Н; при b = 0,35 м (kоб =0,89): 5 – S = 75 Н; 6 – S = 175 Н; 7 – S = 580 Н; 8 – S = 830 Н
После обработки экспериментальных данных было установлено, что для зависимостей тормозного усилия от смещения ленты (до срабатывания улавливающего устройства) более подходящий является аппроксимация линейной зависимостью вида Wт=ax+b (рис. 4-6), а для зависимостей тормозного усилия от величины деформации лотка ленты в зоне ее взаимодействия с ловителем более достоверной является аппроксимация экспоненциальной зависимостью вида Wт=aebh (рис. 7, 8).
Используя представленные на графиках (рис. 4-6, 8) зависимости тормозного усилия, определяем необходимое число канатных улавливающих устройств для конвейеров с подвесной лентой.
Таким образом, подтверждается первое научное положение, которое заключается в уточнении математической модели канатного улавливающего устройства с установлением функциональных связей, аппроксимируемых экспоненциальными (рис. 8) и линейными (рис. 4-6) уравнениями, между величиной тормозного усилия и обратного смещения ленты при срабатывании ловителя и поперечной и продольной деформации лотка конвейерной ленты в зоне ее взаимодействия с рабочим органом ловителя, его поперечным профилем в момент захвата ленты и ее натяжением.
2. Экспериментально установлено, что тормозное усилие при максимальной загрузки лотка ленты транспортируемым грузом 250 кг/м, при значениях коэффициента обхвата рабочим органом ловителя лотка ленты от 0,865 до 0,925 и деформации лотка ленты ловителем в вертикальной плоскости от 0 до 100 мм изменяется в пределах от 0,52 кН до 21,55 кН, что свидетельствует об эффективности предлагаемой конструкции ловителя.
Расчет тормозного усилия конвейерной ленты улавливаемой канатным ловителем производился на исследовательском полномасштабном стенде (рис. 2, рис. 3) при различных параметрах загрузки лотка ленты грузом, расстояниях между бортами конвейерной ленты, коэффициентах обхвата, натяжениях ленты и начальной деформации лотка ленты (рис.7).
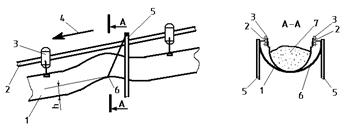
Рис. 7. Схема улавливания конвейерной ленты КсПЛ канатным ловителем: 1 – лоток конвейерной ленты; 2 – направляющие; 3 – кронштейны и ходовые катки; 4 – направление движения ленты после обрыва; 5 – стойки; 6 – канатный ловитель; 7 – транспортируемый груз; h – величина деформации лотка ленты канатным ловителем
Входе проведенных экспериментов были выявлены зависимости, показанные на графике (рис. 8):
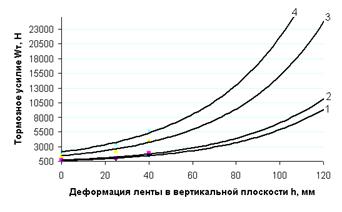
Рис. 8. Графики зависимостей тормозного усилия Wт от величины деформации (проседания) лотка ленты h в зоне ее взаимодействия с ловителем при расстоянии между бортами ленты b = 650 мм: 1 – при натяжении конвейерной ленты S = 75 Н; 2 – S = 175 Н; 3 – S = 580 Н; 4 – S = 830 Н
Согласно выведенным зависимостям можно утверждать, что при максимальной загрузке лотка ленты транспортируемым грузом q = 250 кг/м, при коэффициентах обхвата ловителем ленты от 0,865 до 0,925, деформации лотка ленты ловителем от 0 до 100 мм величина тормозного усилия изменяется в пределах 0,52 кН до 21,55 кН, что позволяет прогнозировать необходимое количество и растановку канатных ловителей по трассе конвейера с подвесной лентой. Таким образом подтверждено второе научное положение, заключающееся в установлении зависимости величин тормозного усилия от деформации лотка ленты канатным ловителем в вертикальной плоскости при различных натяжениях ленты, ширины лотка ленты и коэффициентах обхвата.
На основании закономерностей, рассмотренных в рамках данных научных положений, а также других выводов, освещенных в работе, была предложена методика расчета и выбора параметров улавливающего устройства канатно-петлевого типа для конвейеров с подвесной лентой. С помощью этой методики можно производить выбор параметров единичного улавливающего устройства и необходимое их количество для установки на наклонном конвейере с подвесной лентой с заданными длиной, углом наклона, линейной нагрузкой и другими параметрами.
На базе предложенной методики была создан алгоритм и написана компьютерная программа, выполняющая автоматизированный расчет основных параметров канатного улавливающего устройства конвейеров с подвесной лентой и их необходимое количество на конвейере по заданным исходным данным.
Использование канатных улавливающих устройств с большим тормозным усилием на наклонных конвейерах с подвесной лентой исключает необходимость установки большого количества ловителей и связанную с этим проблему невозможности их синхронного срабатывания, повторный разрыв конвейерной ленты при ее улавливании.
Заключение
В диссертации, представляющей собой законченную научно-квалификационную работу, на базе выполненных теоретических и экспериментальных исследований была решена актуальная научно-практическая задача установления закономерностей формирования величины тормозного усилия при улавливании оборвавшейся ленты наклонного конвейера с подвесной лентой с использованием ловителей канатного типа, позволяющая оценить величину тормозного пути и минимизировать нагрузки на конвейерную ленту и рабочие органы улавливающего устройства, что имеет существенное значение для горной промышленности.
Основные научные результаты и практические рекомендации, заключаются в следующем:
1. Уточнена математическая модель процесса улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой при реализации тормозного усилия с помощью улавливающих устройств канатного типа.
2. Экспериментально установлено, что рабочее значение тормозного усилия, обеспечиваемого ловителем канатного типа, достаточно при минимальном смещении улавливаемой ленты, которое, в свою очередь зависит от соотношения поперечных профилей рабочего органа ловителя и лотка конвейерной ленты, от заполнения лотка ленты транспортируемым грузом и от натяжения улавливаемой ленты в зоне установке ловителя. При этом величина тормозного усилия при ширине лотка ленты от 0,25 м до 0,65 м, коэффициенте обхвата от 0,865 до 0,925, деформации лотка ленты ловителем от 0 до 100 мм и заполнения ленты транспортируемым грузом от 0 до 250 кг/м изменяется в пределах от 0,3 кН до 21,55 кН.
3. Разработана и апробирована методика для проведения стендовых испытаний, на основе которой получены закономерности изменения тормозного усилия от тормозного пути, при различных расстояниях между бортами ленты, натяжениях ленты и степень ее загрузки транспортируемым грузом.
4. Предложена защищенная патентом конструкция улавливающего устройства канатного типа для конвейеров с подвесной лентой, которая с учетом полученных в результате экспериментальных исследований параметров – величин тормозного усилия и закономерностей его реализации, может быть рекомендована не только для использования на конвейерах с подвесной лентой с опиранием ее бортов на стационарные дисковые ролики и ходовые катки, но и для использования на широко применяемых в различных отраслях промышленности ленточных конвейерах с желобчатыми роликовыми опорами.
5. Разработана методика расчета и выбора параметров улавливающего устройства для наклонных конвейеров с подвесной лентой и стационарными опорными роликами, учитывающая обозначенные в защищаемых научных положениях закономерности.
6. На основе данной методики разработана программа для расчета и анализа основных параметров канатных улавливающих устройств конвейеров с подвесной лентой и их необходимое количество на конвейере с заданными исходными данными.
Основные положения диссертации опубликованы в следующих работах:
1. Федоров устройства для ленточных конвейеров с подвесной лентой / , // Горное оборудование и электромеханика. №6. 2008. –С.46-48.
2. Тарасов совершенствования технических средств для улавливания лент уклонных и бремсберговых конвейеров / , // Записки Горного института. С-Пб: СПГГИ, 2008 –Т.178. –С.95-101.
3. Стенд для исследования параметров ловителей для конвейеров с подвесной лентой. Пат. РФ № 000 МПК7 G01L5/00 (2006.01) / , , патентообладатель Санкт-Петербургский государственный горный институт, опубликовано: 27.04.2008 Бюл. №12.
4. Наклонный конвейер с подвесной лентой. Пат. РФ № 000 МПК7 B65G15/08 (2006.01), B65G43/06 (2006.01) / , , патентообладатель Санкт-Петербургский государственный горный институт, опубликовано: 10.10.2008 Бюл. №28.
5. Стенд для исследования улавливающих устройств канатного типа для конвейеров с подвесной лентой. Пат. РФ № 000 МПК7 G01L5/04 (2006.01), / , , патентообладатель Санкт-Петербургский государственный горный институт, опубликовано: 27.03.2009 Бюл. №9.
6. Стенд исследования параметров улавливания оборвавшейся ленты наклонного конвейера с подвесной лентой. Пат. РФ № 000 МПК G01L 5/04 (2006.01), / , , патентообладатель Санкт-Петербургский государственный горный институт, опубликовано: 20.07.2009 Бюл. №20.
7. Федоров средства для улавливания оборвавшихся лент наклонных конвейеров / , // 5-я межрегиональная научно-практическая конференция «Освоение минеральных ресурсов Севера: проблемы и решения», 11-13 апреля 2007 г. Воркута, 2007 - Т.1 -С.115-119.
