

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Звенья систем могут быть статическими и астатическими. У статического звена при постоянном входном воздействии выходная величина со временем устанавливается на постоянном значении, отличном от первоначального, а у астатического звена в установившемся режиме выходная величина непрерывно изменяется с постоянной скоростью или ускорением.
Динамические звенья называют типовыми, если изменение проходящего через них сигнала описывается алгебраическим или дифференциальным уравнением не выше 2-го порядка. Они имеют одну входную и одну выходную величину. Титовыми звеньями являются: усилительное, интегрирующее, дифференцирующее, апериодическое, колебательное и запаздывающее. В табл. I.3 приведены уравнения динамики указанных звеньев, их переходные характеристики и графики.
Соединения звеньев. В реальных системах звенья объединяют последовательно, параллельно, а также в соединения с замкнутой обратной связью (рис I-11). При последовательном соединении звеньев (рис. I-11, а) выходная величина предыдущего звена без искажения поступает на вход последующего звена. При таком соединении звеньев входной величиной является входная величина первого по ходу сигнала звена, а выходной— выходная величина последнего из них.
При параллельном соединении звеньев (рис I-11; б) входной сигнал через узел разветвления поступает на входы всех элементарных звеньев. Выходные сигналы этих звеньев суммируются и направляются на выход соединения.
При замкнутой обратной связи (рис. I-11, в) система состоит из двух цепочек звеньев, каждая из которых может представлять собой достаточно сложное соединение. По одной из этих цепочек сигнал проходит последовательно через звенья от входа соединения к его выходу, т. е. по прямой связи, а по другой — от выхода соединения к входу, т. е. по обратной связи. При этом на вход первой цепочки звеньев подается сигнал x0, равный сумме входной величины соединения хвх и выходной величины второй цепочки звеньев хп
Выходной величиной такого соединения хвых является выход к-го звена; одновременно этот же сигнал подается на вход (к + 1)-го звена.
Если сигнал с выхода обратной связи и основной входной сигнал соединения действуют в одном направлении, то обратная связь называется положительной, а если эти сигналы действуют в противоположных направлениях — отрицательной.
Комбинации этих соединений звеньев позволяют представить любую сложную АСР химико-технологического процесса.
9. Свойства объектов регулирования: ёмкость, самовыравнивание, запаздывание и их количественная оценка.
Самовыравнивание объекта характеризует его устойчивость. Самовыравниванием называют свойство устойчивого объекта самостоятельно устанавливаться в равновесное состояние после изменения своей входной величины. В объектах с самовыравниванием ступенчатое изменение входной величины приводит к изменению выходной величины со скоростью, постепенно уменьшающейся до нуля, что связано с наличием внутренней отрицательной обратной связи. Количественно эта характеристика определяется степенью самовыравнивания ρ, под которой понимают отношение изменения входной величины объекта (Х, Z) к изменению выходной величины по достижении объектом равновесного состояния y∞
Чем больше степень самовыравнивания, тем меньше отклонение выходной величины от первоначального положения.
Емкость объекта является свойством, присущим всем динамическим объектам. Она характеризует их инерционность — степень влияния входной величины на скорость изменения выходной. Даже ступенчатое изменение входной величины объекта приводит к изменению выходной величины с конечной скоростью. Под емкостью понимают такое изменение входной величины, которое приводит к изменению его выходной величины на единицу за единичный отрезок времени

Чем больше емкость, тем меньше скорость изменения выходной величины объекта, и наоборот.
Запаздывание объекта выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а только через некоторый промежуток времени т, называемый временем запаздывания. Все реальные объекты обладают запаздыванием, так как изменение потоков вещества или тепла распространяется в объектах с конечной скоростью и требуется время для прохождения сигнала от места нанесения возмущения до места, где фиксируется изменение выходной величины. Обозначив это расстояние через l, a скорость прохождения сигнала через s, выразим время запаздывания следующим образом:
![]()
Влияние свойств объекта на вид его переходного процесса будем изучать на примерах одномерных объектов с сосредоточенными параметрами.
В зависимости от вида дифференциального уравнения динамики реального объекта химической технологии целесообразно различать объекты первого, второго и высокого порядков.
По способности восстанавливать равновесное состояние при конечном изменении входных величин можно подразделять объекты на нейтральные, устойчивые и неустойчивые (рис. II-4)
11. Влияние свойств объекта на выбор канала управления.
Влияние свойств объектов на их регулирование. Свойства объектов оказывают существенное влияние на выбор закона регулирования и качество переходного процесса АСР.
Емкость объектов влияет на выбор типа регулятора. Чем она меньше, т. е. чем больше скорость изменения выходной величины объекта при данном изменении нагрузки, тем большую степень воздействия на объект должен иметь регулятор.
Влияние самовыравнивания объекта аналогично действию автоматического регулятора. Так, нейтральные объекты, не обладающие самовыравниванием, самостоятельно не обеспечивают устойчивой работы и требуют обязательного применения автоматических регуляторов. Причем, не каждый регулятор может справиться с задачей управления такими объектами. Например, применение интегрального регулятора на нейтральном объекте не позволяет получить устойчивой работы системы. Таким образом, отсутствие самовыравнивания в объектах усложняет задачу регулирования, а его наличие облегчает задачу поддержания выходной величины объекта на заданном значении. Чем выше степень самовыравнивания, тем более простыми методами можно обеспечить требуемое качество регулирования.
В некоторых объектах самовыравнивание так велико, что для поддержания постоянного значения выходной величины объекта вообще не требуется установки регулятора.
Наличие запаздывания в АСР усложняет задачу регулирования технологической величины в объекте. Поэтому необходимо стремиться к его уменьшению: устанавливать чувствительный элемент и исполнительное устройство системы как можно ближе к объекту регулирования, применять малоинерционные измерительные преобразователи и т. д.
12. Математическая модель изменения уровня жидкости в резервуаре, из которого жидкость откачивается насосом. Переходные процессы в
Производительность Fp постоянна.
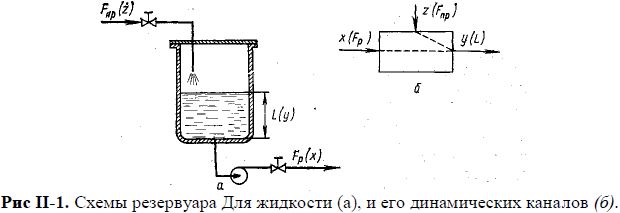
Для нахождения зависимости уровня жидкости в аппарате L от входных величин Fпр и Fp (в м3/с) составим уравнение материального баланса аппарата:
![]()
где V — объем жидкости в аппарате, м3; t — время, с. Отсюда скорость изменения объема жидкости в аппарате:
![]()
Скорость изменения уровня жидкости L, если площадь горизонтального сечения аппарата А (в м2) неизменна по высоте
![]()
Таким образом, скорость изменения уровня в резервуаре пропорциональна разности потоков жидкости на входе и выходе. Уровень жидкости принимает постоянные значения во времени (скорость dL/dt=0) только при отсутствии рассогласования потоков Fпр и Fp.
Проинтегрируем уравнение (II,6) в пределах от 0 до t
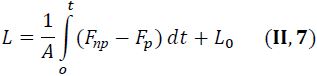
Следовательно, выходная величина объекта пропорциональна интегралу от изменения его входных величин.
При ступенчатом изменении нагрузки объекта на величину ΔF уровень жидкости L изменяется по зависимости (рис II-5):
![]()
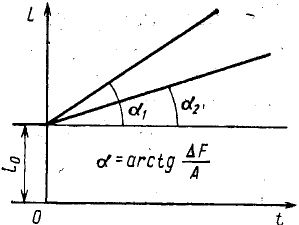
Рис. II-5. Переходная характеристика нейтрального объекта первого порядка.
Как следует из уравнения (II,8), скорость изменения выходной величины при ступенчатом возмущении ΔF постоянна и равна
![]()
При расчетах систем автоматизации уравнение динамики объекта представляют в относительных величинах. Предполагая, что Fnр является возмущением, a Fp — регулирующим воздействием (см. рис. II-1), имеем
![]()
где L0 и F0 — значения соответствующих величин при равновесном состоянии объекта.
Записав уравнение (II,6) в приращениях и введя относительные величины, получим уравнение динамики:
![]()
Из уравнения (II,11) видно, что отношение AL0/F0 имеет размерность времени. Его называют временем разгона объекта и обозначают через Tε. Под этим термином донимают время, в течение которого выходная величина объекта у, изменяясь с постоянной скоростью, достигает значения входной величины z. Время разгона Tε прямо пропорционально емкости объекта и характеризует его инерционные свойства.
Заменяя коэффициент в левой части уравнения (II,11) через Tε, получим уравнение динамики нейтрального объекта первого порядка в общем виде
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
