

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
где Tвк и Tотк — соответственно периоды включения и выключения сигнала (при хтaх и хтin).
Моменты срабатывания Пз-регулятора определяются свойствами линейной части АСР и видом статической характеристики регулятора.
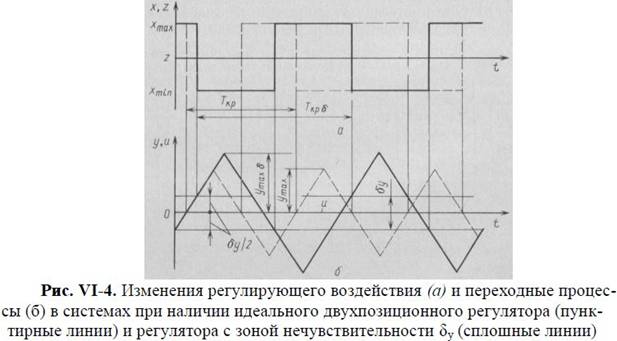
Качество двухпозиционного регулирования характеризуется параметрами, возникающих в системе автоколебаний: амплитудой А, частотой w=2π/Tкр и смещением а0 среднего значения автоколебаний относительно заданного значения регулируемой величины. Эти параметры автоколебаний зависят от величины запаздывания и емкости химико-технологического объекта, значения его нагрузки, величины зоны нечувствительности регулятора δу и пределов изменения его выходной величины δх = xmax-xmin. Чем меньше амплитуда автоколебаний А и смещение а0 тем качество регулирования выше; при этом wКР не должна быть очень большой. Начальные условия системы не влияют на параметры автоколебаний.
Влияние зоны нечувствительности на качество регулирования иллюстрируется графиками, приведенными на рис. VI-4. На рисунке показаны переходные процессы и текущее изменение регулирующего воздействия для нейтрального объекта 1-го порядка с запаздыванием и Пз-регулятора, статическая характеристика которого однозначна, т. е. не имеет зоны нечувствительности (пунктирные линии), и регулятора с зоной нечувствительности (сплошные линии). Найдем значения параметров этих переходных процессов.
В первом случае после достижения заданного значения и срабатывания регулятора регулируемая величина будет продолжать изменяться в том же направлении со скоростью
![]()
в течение времени т, а затем начнет изменяться в противоположном направлении с такой же скоростью. При этом максимальная ошибка регулирования уmах будет равна
![]()
а период автоколебаний Tкр
![]()
Таким образом, с увеличением зоны нечувствительности регулятора качество регулирования ухудшается. Уменьшение же этой зоны приводит к уменьшению амплитуды и периода автоколебаний в системе. Поэтому в тех случаях, когда к точности регулирования предъявляются повышенные технологические требования и частота срабатывания регулятора не ограничена, следует применять регуляторы с возможно меньшей зоной нечувствительности.
Скорость изменения регулируемой величины [см. уравнение (VI,7)] и амплитуды автоколебаний [см. уравнение (VI,8)] пропорциональны изменению регулирующего воздействия δх. С уменьшением δх амплитуда А уменьшается. Следовательно, для повышения качества регулирования пределы изменения регулирующего воздействия следует уменьшать. Однако при этом необходимо иметь в виду, что регулирующее воздействие хтiп должно быть меньше минимально возможной нагрузки объекта, а хтax — больше максимальной нагрузки. Поэтому при незначительных колебаниях нагрузки пределы изменения регулирующего воздействия могут быть установлены небольшими, что приведет к возникновению в системе автоколебаний малой амплитуды. При значительных колебаниях нагрузки диапазон δх должен быть установлен достаточно большим, а это приведет к появлению автоколебаний большой амплитуды. Таким образом, повышать качество регулирования путем уменьшения пределов регулирующего воздействия регулятора δх целесообразно только при небольших колебаниях нагрузки объекта.
Ранее мы в основном анализировали симметричные автоколебания регулируемой величины в системе, одним из необходимых условий возникновения которых является постоянство нагрузки объекта z (относительное ее изменение равно нулю). На практике же нагрузка объекта часто изменяется и относительная величина ее отличается от нуля. Это оказывает влияние на вид переходного процесса. Графики переходного процесса и изменения регулирующего воздействия в системе, состоящей из нейтрального объекта 1-го порядка с запаздыванием и Пз-регулятора без зоны нечувствительности, при возрастании абсолютного значения нагрузки в 1,5 раза и уменьшении ее в 2 раза относительно номинального значения приведены на рис. VI-5, а, б. В обоих рассматриваемых случаях автоколебания регулируемой величины асимметричны относительно ее заданного значения и отличны по характеру. Среднее значение автоколебаний смещается по отношению к заданному на величину а0 в направлении, обратном изменению нагрузки. Эта квазистатическая ошибка регулирования может быть определена из равенства:
![]()
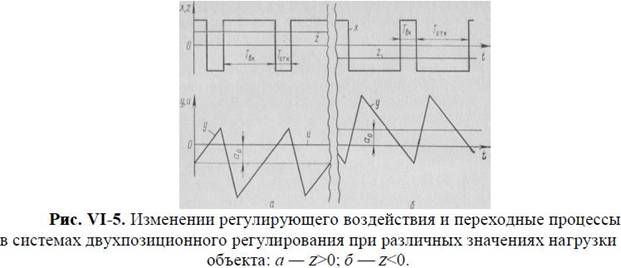
Влияние изменения нагрузки объекта на отношение Твк/Тотк кратность срабатывания регулятора п и относительный период автоколебаний Екр/τ показаны на рис. VI-6. При превышении относительной нагрузкой z нулевого значения Твк увеличивается по сравнению с Тотк, а кратность срабатывания регулятора п уменьшается, и наоборот. Отклонение относительной нагрузки z от нулевого значения в обе стороны приводит к возрастанию периода автоколебаний.
Изменение заданного значения регулируемой величины от нуля при регулировании объекта, нагрузка которого продолжает оставаться на прежнем (нулевом) значении, приводит к появлению в системе несимметричных автоколебаний типа «треугольная волна» с одинаковым наклоном восходящих и нисходящих прямых. Среднее значение этих колебаний располагается между нулевым и вновь установленным заданным значением регулируемой величины.
Из рассмотрения влияния различных факторов на качество двухпозиционного регулирования следует, что для повышения качества регулирования необходимо уменьшать зону нечувствительности регулятора и, если это возможно, уменьшать пределы изменения регулирующего воздействия регулятора.
На химических производствах применяются пневматические Пз-регуляторы, а также электрические регуляторы, встроенные в потенциометры и другие приборы. Пз-регуляторы просты по конструкции, надежны в работе, несложны в настройке и обслуживании. Поэтому во всех случаях, когда Пз-регуляторы могут обеспечить требуемое качество регулирования, следует применять именно их. Пз-регуляторы в основном целесообразно использовать на объектах, обладающих малым запаздыванием и большой емкостью.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
