

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Интегрируя уравнение (II,12), найдем
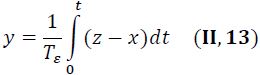
В нашем случае х=0. Величину, обратную Tε, часто называют скоростью разгона объекта ε, под которой понимают скорость изменения выходной величины у при предварительном ступенчатом изменении входной величины z, равном единице. Действительно, при единичном ступенчатом возмущений z—x=1(t) изменение выходной величины у подчиняется зависимости:
![]()
Передаточная функция нейтрального объекта первого порядка:
![]()
В динамическом отношении такой объект представляет собой интегрирующее звено.
Нейтральным объектам первого порядка присущи только емкостные (инерционные) свойства, что выражается, например при регулировании уровня L, степенью влияния величины Fnp—Fp на скорость dL/dt. Это влияние зависит от площади поперечного сечения аппарата. При большем значении А скорость изменения уровня меньше и наоборот (см. рис. II-5).
Для рассмотренного выше аппарата емкость равна
![]()
Из сравнения уравнений (II,6) и (II,16) следует, что емкость резервуара численно равна площади его горизонтального сечения. Единицей измерения емкости в данном случае является м2.
Емкость объектов зависит от протекающих в них процессов. Так емкость тепловых объектов, в которых осуществляется теплообмен при регулировании в них температуры, находят по изменению теплового потока Δq, Вт, вызывающего приращение температуры T на 1 °С в течение 1 ч:
![]()
Емкость аппарата зависит от теплоемкости ст, находящегося в нем продукта. Единицей измерения емкости теплового объекта является Дж/°С.
13. Математическая модель изменения уровня жидкости в резервуаре, из которого жидкость отводится самотёком. Переходные процессы в объекте.
Устойчивые объекты 1-го порядка. Если жидкость из рассмотренного выше резервуара не откачивать насосом, а отводить самотеком по трубопроводу, на котором имеется дополнительное гидравлическое сопротивление, например вентиль, то при рассогласовании потоков на входе и выходе регулируемая величина (уровень) будет самостоятельно устанавливаться в новом равновесном состоянии.
При ступенчатом увеличении притока жидкости Fпр а величину ΔF (рис. II-6) уровень L в аппарате в первый момент начнет изменяться, как и в случае нейтрального объекта (см. пунктир), со скоростью определяемой равенством (II,9). Но при повышении уровня возрастает гидростатический напор, что в свою очередь увеличит расход жидкости из аппарата Fp; его зависимость от уровня L:
![]()
где α — коэффициент расхода вентиля; А — площадь его проходного сечения; g — ускорение свободного падения.
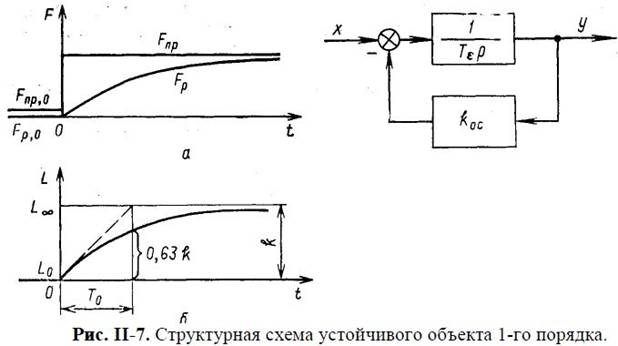
Рис. II-6. Графическое изменение Fпр и Fр в устойчивом объекте первого порядка (а) и его переходная характеристика (б).
С увеличением Fp величина возмущения ΔF = Fпр—Fp, а, следовательно, и скорость изменения уровня уменьшаются. Со временем расход жидкости постепенно достигнет текущего значения притока, повышение ее уровня, изменяющегося по экспоненте, прекратится и наступит новое равновесное состояние объекта, но при более высоком значении уровня L∞. Аналогичным образом при ступенчатом уменьшении Fnp уровень L начнет понижаться, что обусловит уменьшение расхода Fp, вследствие уменьшения гидростатического напора. Со временем между расходом и притоком жидкости восстанавливается равенство, но при более низком уровне.
Устойчивость объектов объясняется наличием в них отрицательной обратной связи. В частности, в рассматриваемом объекте обратная связь определяется равенством (II,18).
Для нахождения передаточной функции звена обратной связи линеаризуем зависимость (II,18), разлагая ее в ряд Тейлора в окрестности точки с координатами (Lo, Fpo)
Откуда
Учитывая равенства (II,10) и (II,18), окончательно получим:
![]()
где koc= 1/2.
Таким образом, в данном случае обратная связь соответствует усилительному звену с коэффициентом усиления 1/2.
Структурная схема устойчивого объекта 1-го порядка приведена на рис. II-7. Интегрирующее звено с передаточной функцией 1/Тεр охватывается звеном отрицательной обратной связи с передаточной функцией kос. Передаточная функция такого объекта имеет вид

где k=1/koc — коэффициент усиления объекта; T0 = Tε/kос - постоянная времени объекта, под которой понимают время, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости ее изменения в начальный момент времени. При t = T0 выходная величина составляет 63% нового установившегося значения. Постоянная времени объекта определяется как проекция на ось времени отрезка касательной к экспоненте, заключенного между точкой касания и точкой пересечения касательной с линией установившегося значения выходной величины (см. рис. II-6,б). Длина этой проекции одинакова для касательных, проведенных к любой точке экспоненты.
Постоянная времени объекта То определяет его динамические свойства. Чем она больше, тем медленнее протекает переходный процесс в объекте, и наоборот.
В соответствии с передаточной функцией (11,20) уравнение динамики устойчивого объекта первого порядка имеет вид
![]()
Переходная характеристика этого объекта аналогично выражению (I,28) будет равна
![]()
Таким образом, рассматриваемый объект представляет собой апериодическое звено первого порядка, коэффициент усиления k которого равен величине, обратной коэффициенту усиления обратной связи, а постоянная времени Т0 — отношению времени разгона интегрирующего звена к коэффициенту усиления обратной связи.
Емкостные свойства устойчивых объектов 1-го порядка аналогичны свойствам нейтральных объектов 1-го порядка.
14. Автоматические регуляторы. Классификация регуляторов по виду используемой энергии, законам регулирования, характеру регулирующего воздействия. Область применения, достоинства и недостатки.
Автоматические регуляторы.
Устройство, с помощью которого в системах регулирования обеспечивается автоматическое поддержание технологической величины около заданного значения, называют автоматическим регулятором. Регулятор является одним из элементов замкнутой системы.
На вход автоматического регулятора подаются текущее ут и заданное и3 значения регулируемой величины. Рассогласование между ними ут—и3 приводит к изменению выходной величины регулятора хр
![]()
Эту зависимость в относительных величинах (при и = 0)
![]()
называют законом регулирования. Каждый конкретный регулятор имеет свой закон регулирования.
Классификация регуляторов.
По наличию подводимой энергии регуляторы подразделяют на не имеющие вспомогательный источник энергии и имеющие таковой. У регуляторов без вспомогательного источника энергии для перемещения регулирующего органа используется энергия регулируемой среды. Они просты по конструкции, надежны в работе, не требуют внешних источников энергии, но имеют ограниченную мощность для приведения в действие регулирующего органа. Такие регуляторы применяют в тех случаях, когда для приведения в действие регулирующего органа не требуются большие усилия и для этого достаточно мощности измерительного устройства, а также, если к качеству переходного процесса не предъявляются жесткие требования.
У регуляторов с вспомогательным источником энергии перемещение регулирующего органа осуществляется дополнительным приводом, работающим от внешнего источника. Они требуют дополнительной внешней энергии и имеют более сложную конструкцию. Эти регуляторы способны обеспечить высокое качество регулирования.
По виду используемой энергии регуляторы делят на гидравлические, электрические и пневматические.
По виду регулируемой величины различают регуляторы температуры, давления, расхода, уровня, концентрации и других величин.
По характеру действия регуляторы подразделяются на имеющие прямую и обратную характеристики. У первых из них возрастание входного сигнала обусловливает увеличение выходной величины, а у вторых — наоборот.
По характеру регулирующего воздействия можно выделить регуляторы прерывистого и непрерывного действия. У регуляторов прерывистого действия непрерывному изменению входной величины соответствует прерывистое изменение регулирующего воз действия хотя бы в одном из элементов регулятора, существенным образом влияющее на работу регулятора в целом. В свою очередь они делятся на позиционные, а также импульсные. У регуляторов непрерывного действия непрерывному изменению входной величины соответствует непрерывное изменение его выходной величины.
По закону регулирования регуляторы непрерывного действия делят на интегральные, пропорциональные, пропорционально-интегральные, пропорционально-дифференциальные и пропорционально – интегрально - дифференциальные. В настоящее время при автоматизации химических предприятий используются позиционные регуляторы и в большей мере регуляторы непрерывного действия.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
