

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
15. Регуляторы двухпозиционные идеальные и с зоной неоднозначности. Статические характеристики: математическое описание и графики. Область применения.
Позиционные регуляторы (Пз-регуляторы. ). Позиционными, или релейными, называют регуляторы, у которых при изменении на входе выходная величина может принимать только определенные, заранее известные значения Переход от одного из этих значений к другому происходит очень быстро, практически мгновенно. Они просты по конструкции, надежны в работе, несложны в обслуживании и при настройке.
Наибольшее распространение получили двухпозиционные регуляторы, у которых выходная величина может принимать только два значения: минимальное или максимальное. Иногда такие регуляторы называют регуляторами типа «открыто» — «закрыто».
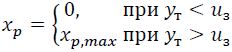
Таким образом, работа идеального (с однозначной характеристикой) Пз-регулятора может быть представлена в виде:
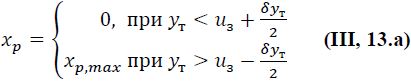
У регулятора с зоной нечувствительности выходная величина х изменяется от 0 до значения хр, max при у = и3+δyt /2 и от значения хр, мах до нуля — при у = и3 - δyt /2 (рис. 7III-3,б). Характеристика такого регулятора выражается следующим образом
В интервале
![]()
величина хр может принимать два значения (0 и xp, mах) в зависимости от предыдущих значений у. Переход с нижней ветви на верхнюю осуществляется при условиях:

а с верхней ветви на нижнюю — при условиях
![]()
Примерами Пз-регуляторов или двухпозиционных устройств могут служить электроконтактный термометр, биметаллический сигнализатор температуры, электроконтактный манометр, пневматическое реле и др.
16. Пропорционально-интегрально-дифференциальные регуляторы. Уравнения динамики для регуляторов с зависимыми и независимыми параметрами настройки. Переходные характеристики. Параметры настройки. Область применения.
Пропорционально-дифференциальные и пропорционально интегрально дифференциальные регуляторы (ПД - и ПИД - регуляторы). В ряде случаев качество регулирования можно повысить введением в закон регулирования составляющей, пропорциональной первой производной или скорости изменения входной величины регулятора. Эта дифференцирующая составляющая (Д-составляющая) формируется при помощи дополнительного устройства.
Уравнения динамики ПД - и ПИД - регуляторов имеют вид
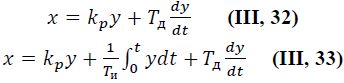
где kp— коэффициент передачи регулятора; Ти — время интегрирования; Tд — время дифференцирования.
ПД - регулятор имеет два параметра настройки: предел пропорциональности δ и время дифференцирования Tд. ПИД - регулятор имеет три параметра настройки: предел пропорциональности δ, время интегрирования Tи и время дифференцирования Tд. Воздействие входной величины этих регуляторов на выходную повышается с уменьшением предела пропорциональности уменьшением времени интегрирования Tи и увеличением времени дифференцирования Tд.
При наличии Д-составляющей выходная величина регулятора х изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения dy/dt. С уменьшением производной dy/dt опережающее действие регулятора также уменьшается и полностью прекращается при у = const; поэтому их называют регуляторами с опережением, или предварением.
Влияние Д-составляющей в ПД - и ПИД - регуляторах одинаково, поэтому далее будем рассматривать только ПД - регуляторы.
Влияние введения Д-составляющей в пропорциональный закон регулирования иллюстрируется графиком, приведенным на рис. III-13, где показаны изменение пропорциональной хП и дифференциальной хд составляющих, а также пропорционально-дифференциальной хпд составляющей, т. е. ПД - закона регулирования при непрерывном изменении входной величины у.
время дифференцирования Tд—это отрезок времени, на который выходная величина ПД - регулятора xпд опережает его пропорциональную составляющую xп при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора kp равен единице.
Передаточная функция W(p) такой системы, в соответствии с равенством (I,49) она равна
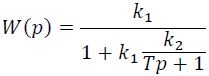
Разделив числитель и знаменатель полученного выражения на k1 и пренебрегая в знаменателе слагаемым 1/k1 получим
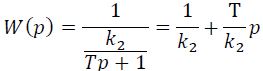
Вводя новые обозначения kр=1/k2 и Tд = T/k2, окончательно находим
![]()
17. Одноконтурные АСР. Блок-схема АСР. Обратные связи в АСР. Формирование отрицательной обратной связи в АСР.
Блок-схема АСР приведена та рис. IV-1. АСР представляет собой замкнутую цепь, состоящую из объекта регулирования ОР, измерительного преобразователя ИП, автоматического регулятора АР и исполнительного устройства ИУ. Возмущающее воздействие z приводит к отклонению регулируемой технологической величины объекта у от заданного значения и. Информация об изменении регулируемой величины воспринимается измерительным преобразователем системы ИП и передается на автоматический регулятор АР. Последний сравнивает текущее значение регулируемой величины у с заданным и и в зависимости от знака и величины рассогласования по заранее заложенному в регулятор закону (алгоритму) вырабатывает регулирующее воздействие х, которое через исполнительное устройство ИУ направляется на объект регулирования ОР и приводит к ликвидации или уменьшению этого рассогласования. Таким образом, причина, вызвавшая срабатывание регулятора, в свою очередь, находится под его обратным воздействием.

Обратные связи АСР. Системы, работающие по принципу отклонения, при действии возмущений z имеют прямую связь — цепочку звеньев объекта, по которой сигнал проходит от входа системы к ее выходу, и обратную связь (ОС), по которой сигнал проходит через автоматический регулятор и канал объекта х→у от выхода системы к ее входу. ОС системы, включающая автоматический регулятор, называется главной ОС; для стабилизации работы системы она обязательно должна быть отрицательной. Это означает, что она должна действовать на объект в направлении, противоположном действию возмущения, т. е. если выходная величина объекта под действием возмущения отклонилась от заданного значения, то автоматический регулятор должен выработать такое воздействие, которое будет направлено на устранение или прекращение отклонения выходной величины. Обеспечить такое условие можно лишь при наличии в замкнутом контуре нечетного числа элементов обратного действия, т. е. таких элементов, возрастание входной величины которых приводит к уменьшению выходной. Число же элементов прямого действия (элементов, у которых увеличение входной величины приводит к возрастанию выходной) в замкнутом контуре может быть любым. На схемах входы элементов прямого действия обозначаются знаком «плюс», а входы элементов обратного действия — знаком «минус».
24, 25. Системы двухпозиционного регулирования и их область применения. Динамика двухпозиционного регулирования выходного параметра устойчивого объекта 1-го и 2-го порядков и характеристики данного автоколебательного процесса.
Системы двухпозиционного регулирования.
Системы двухпозиционного регулирования имеют в своем составе двухпозиционный или Пз-регулятор, выходная величина которого может принимать только два значения, соответствующих максимальной хтах и минимальной хтiп величинам регулирующего воздействия. Такие системы относятся к нелинейным. В простейшем случае структурная схема системы двухпозиционного регулирования (рис. VI-1) может быть представлена в виде последовательного соединения Пз-регулятора и линейной части системы, охваченных отрицательной обратной связью.
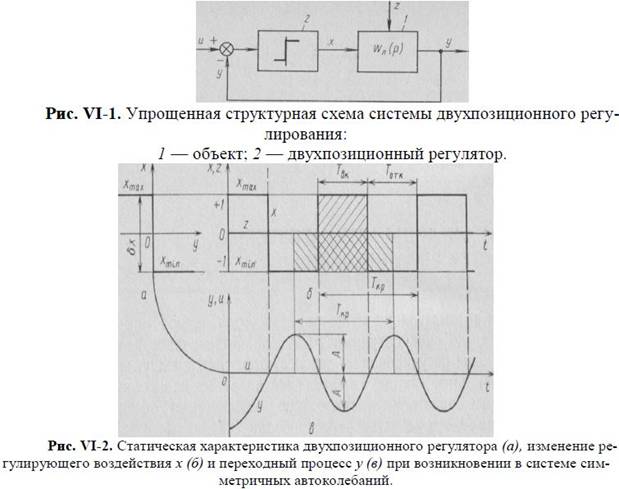
Предположим, что при максимальном регулирующем воздействии хтах регулируемая величина объекта у возрастает. В этом случае для получения отрицательной обратной связи в замкнутом контуре регулирования регулятор должен иметь статическую характеристику, настроенную на «минимум» (рис. VI-2,а).
Для работоспособности системы двухпозиционного регулирования необходимо, чтобы при равенстве передаточных функций объекта Wx(p) и Wz(p) по каналам х→у и z→y текущие значения эквивалентного возмущения объекта zэкв лежали бы в пределах xmax > z > xmin. Последнее условие соответствует случаю, когда основным возмущением z является нагрузка объекта, изменение которой компенсируется регулирующим воздействием.
Пз-регулятор выработает регулирующее воздействие, равное xmax, если текущее значение регулируемой величины у ниже ее заданного значения и (рис. VI-2,6); в этом случае регулируемая величина возрастает (рис. VI-2,e). При достижении текущим значением заданного регулирующее воздействие х мгновенно уменьшается до xmin. Однако вследствие наличия у объекта инерционных свойств регулируемая величина еще продолжает возрастать в течение некоторого времени (правда, с уменьшающейся скоростью), и лишь затем начинает понижаться. При последующем пересечении регулируемой величиной заданного значения регулятор снова сформирует регулирующее воздействие xmax, что через некоторое время вновь приведет к очередному повышению регулируемой величины и т. д. Таким образом, при использовании Пз-регуляторов регулируемая технологическая величина совершает колебания относительно заданного значения. Эти колебания относительно среднего значения с амплитудой А и периодом Tкр называют автоколебаниями (рис. VI-2, в). Период автоколебаний

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
