

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
| (А.32) |
Динамические эквивалентные нагрузки в случаях применения в буксовых узлах радиально-упорных и упорных шариковых подшипниках, освобожденных от восприятия радиальных сил, вычисляют по формулам (А.20), (А.22). Осевую нагрузку на эти типы подшипников вычисляют по формуле:
| (А.33) |
А.14.3. Расчет расчетного ресурса подшипников тяговых электродвигателей и тяговых редукторов
Определение динамических эквивалентных нагрузок подшипников тяговых электродвигателей и тяговых редукторов, работающих при переменных условиях нагружения, используемых для расчета расчетного ресурса подшипников тяговых электродвигателей производят согласно п. А.14.3.1, а тяговых редукторов – согласно п. А.14.3.2.
А.14.3.1. Расчет динамической эквивалентной нагрузки подшипников тяговых электродвигателей
Условные обозначения, определение и размерность величин, используемых при расчете, представлены в таблице А.7, расчетная схема нагружения представлена на рис. А.5.
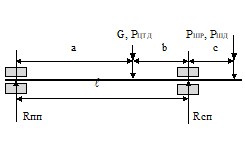
Рис. А.5. Схема нагружения вала якоря тяговых электродвигателей
Исходные данные для расчета
7
Обозначение | Определения | Размерность |
a, b, c, | Размеры якоря (схемы на рисунке А.5) | м |
G | Сила тяжести (вес) якоря | Н |
DК | Диаметр среднеизношенных колес по кругу катания | м |
DО | Диаметр делительной окружности ведущей шестерни тягового редуктора | м |
i | Передаточное число тягового редуктора | - |
N∞ | Мощность тягового электродвигателя, соответствующая длительному режиму работы | кВт |
n∞ | Частота вращения тягового электродвигателя, соответствующая длительному режиму работы | с-1 |
VК | Конструктивная скорость подвижного состава | км/ч |
q | Сила тяжести (вес) необрессоренных частей из расчета на одну колесную пару | Н |
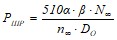
Расчетная (эквивалентной по воздействию на подшипники) нагрузка на ведущую шестерню определяется по формуле:
| (А.34) |
где |
|
в - эквивалентный коэффициент, учитывающий использование мощности двигателя, с поправкой на влияние радиального (распорного) усилия в зубчатом зацеплении и к. п.д. передачи: - для автономного МВПС, предназначенных для пригородного движения (с частыми остановками и разгонами) - для автономного МВПС дальнего сообщения |
 ,
,Эквивалентный коэффициент ![]() зависит от пульсации тока, характеризуемой коэффициентом пульсации тока КПУЛ, который определяется по формуле:
зависит от пульсации тока, характеризуемой коэффициентом пульсации тока КПУЛ, который определяется по формуле:
| (А.35) |
где | JПЕРMAX - максимальное значение переменной составляющей выпрямленного тока; JСР - среднее значение выпрямленного тока. |
 ,
,При КПУЛ![]() 10%
10% ![]() =1,0; при КПУЛ>10% величину
=1,0; при КПУЛ>10% величину ![]() принимают по графику, приведенному на рис. А.6.
принимают по графику, приведенному на рис. А.6.
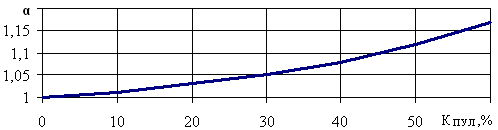
Рис. А.6. График для определения эквивалентного коэффициента,
учитывающего пульсацию тока
При тяговом приводе с редуктором, собранном в отдельном от двигателя корпусе (при рамном подвешивании тяговых электродвигателей), и передачей тягового усилия через муфту или торсионный вал расчетную нагрузку от тягового усилия принимают равной нулю.
При резинокордной муфте вследствие смещения вала шестерни относительно вала якоря, возникает радиальная нагрузка на вал якоря, которая зависит от величины смещения, жесткости корда и других факторов. В этом случае силу, действующую на консольный конец вала якоря ![]() , определяют с учетом особенностей конструктивного исполнения узла.
, определяют с учетом особенностей конструктивного исполнения узла.
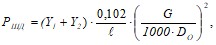
Динамическая нагрузка на консольную часть вала якоря РШД определяется по формуле:
| (А.36) |
где | Y1, Y2 - коэффициенты, учитывающие динамические нагрузки на зуб шестерни от колебаний колесной пары, от неточностей изготовления и вследствие износа зубчатой передачи. |
Коэффициенты, учитывающие динамические нагрузки на зуб шестерни от колебаний колесной пары, от неточностей изготовления и вследствие износа зубчатой передачи определяются:
| (А.37) |
| (А.38) |
При опорно-рамном подвешивании и наличии эластичных элементов в приводе величины Y1 и Y2 уменьшают в 2 раза. При приводе с карданным валом и полом вале якоря значения Y1 и Y2 принимают равными нулю.
Динамическую нагрузку от колебаний тягового электродвигателя условно принимают приложенной к центру тяжести якоря и определяют из выражения:
| (А.39) |
где | m - коэффициент, учитывающий динамические условия работы двигателя. |
При опорно-рамном подвешивании тяговых электродвигателей коэффициент принимать равным m=0,55;
Динамическая нагрузка от дисбаланса якоря NЯ определяется по формуле:
| (А.40) |
В выражениях приняты следующие обозначения индексов при величинах:
1 – для движения колесной пары вперед;
2 – для движения тяговым электродвигателем вперед;
СП – сторона привода;
ПП – сторона противоположная приводу.
Коэффициенты, учитывающие размеры якоря и возможную неравномерность распределения нагрузки при двусторонней передаче между двумя шестернями, равны:
при односторонней передаче:
| (А.41) |
при двусторонней передаче:
| (А.42) |
Реакции со стороны привода определяются по формулам:
| (А.43) |
| (А.44) |
При рамном подвешивании тягового электродвигателя, когда шестерня не смонтирована в редукторе и отделена от вала якоря, независимо от направления движения реакции со стороны привода определяются по формулам:
| (А.45) |
Реакции со стороны противоположной приводу определяются по формулам:
| (А.46) |
| (А.47) |
При рамном подвешивании тягового электродвигателя, когда шестерня не смонтирована в редукторе и отделена от вала якоря, независимо от направления движения реакции со стороны противоположной приводу определяются по формулам:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
