

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
∑xi=0
∑yi=0
∑Mo=0
причем оси и точка O, относительно которой пишется уравнение моментов, выбираются произвольно.
Уравнения равновесия могут быть записаны иначе:
∑xi =0
∑MA=0
∑MB=0
Здесь ось Ox не должна быть перпендикулярна линии, проходящей через точки A и B.
∑MA=0
∑MB=0
∑MC=0
В задачах такого типа число неизвестных плоской системы сил не должно превышать трех, иначе система станет статически неопределимой.
Равновесие произвольной пространственной системы сил
В случае равновесия твердого тела в пространстве можно составить шесть уравнений равновесия - три уравнения равенства нулю суммы проекций всех сил на оси x, y и z, а также суммы моментов относительно этих же осей:
∑xi =0; ∑yi =0; ∑zi =0;
∑Mix=0; ∑Miy=0; ∑Miz=0.
из которых легко могут быть определены шесть неизвестных.
План решения таких задач общий для всех типов задач на равновесие.
Опорные устройства балочных систем
Шарнирно-неподвижная опора может изображаться по-разному (рис.17, а или б). Она может быть заменена либо силой Rс углом б (рис.17, в), либо двумя силами, например, XA и YA (рис.17, г).
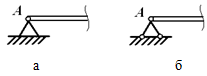
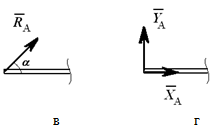
Рис.17
Всегда можно перейти от R и б к XA и YA (и наоборот):
XA= R cosб; YA= R sinб;
![]()
Шарнирно-подвижная опора (рис.18, а) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное. Реакция направлена по нормали к опорной поверхности (рис.18, б).
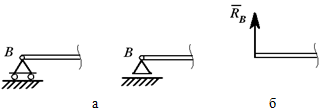
Рис.18
Связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рис.19, б), их действие заменено силами XA, YA и RB.
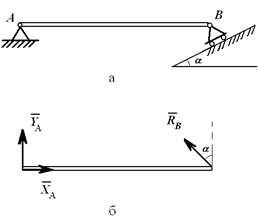
Рис.19
Скользящая заделка – соединение стержня и втулки в плоскости (рис.20). Отбросим втулку – получим действие на стержень силы RD и MD момента.
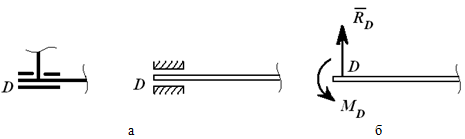
Рис.20
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом б (или XA и YA ) и момент МA (рис.21).
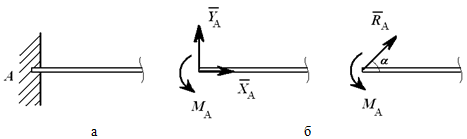
Рис.21
На рис.22 –25 показаны примеры замены сил, расположенных в пространстве, их реакциями.
Шарнирно-неподвижная опора, или сферический шарнир (рис.22, а), заменена системой сил (рис.22, б) XA, YA и ZA, т. е. силой, неизвестной по величине и направлению.
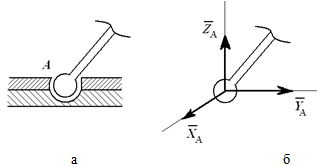
Рис.22
Вал, закрепленный в опорах (рис.23), а показан: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рис.23, б).
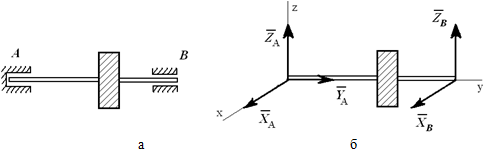
Рис.23
На рис.24 и 25 приведены примеры замены различных связей их реакциями.
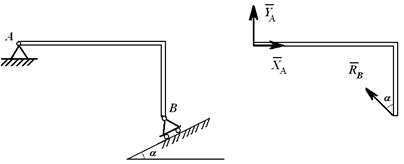
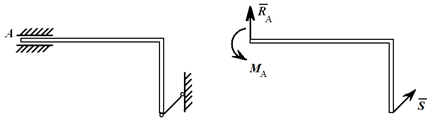
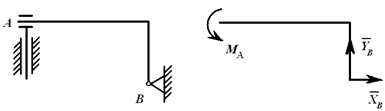
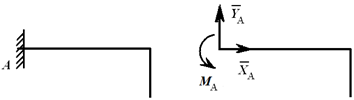
Рис.24
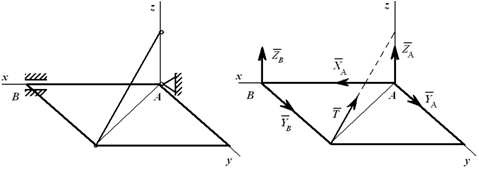
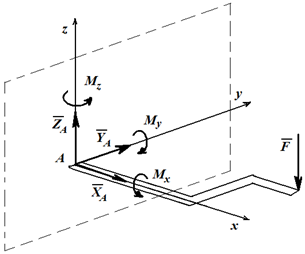
Рис.25
Правила знаков для сил и моментов в уравнениях статики
При составлении уравнений статики для систем находящихся в равновесии (например приопределении опорных реакций) правила знаков могут быть упрощены до следующего вида:
Нагрузки направленные в одну сторону принимаются положительными, а соответственно, нагрузки обратного направления записываются со знаком минус.
То есть, для уравнений сумм проекций сил на оси:
Проекции сил и нагрузок на координатную ось имеющие одинаковое направление принимаются положительными, а проекции усилий противоположного направления – отрицательными.
Например, для такой схемы нагружения:
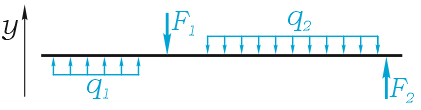
уравнение суммы сил имеет вид
![]()
А так как суммы проекций разнонаправленных сил равны, то данное уравнение можно записать и так:
![]()
Здесь F(q) – равнодействующая от распределенной нагрузки, определяемая произведением интенсивности нагрузки на ее длину.
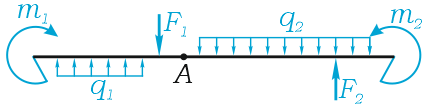
Для уравнений сумм моментов
Сосредоточенные моменты и моменты сил стремящиеся повернуть систему относительно рассматриваемой точки по ходу часовой стрелки записываются в уравнения с одним знаком, и соответственно моменты, имеющие обратное направление с противоположным знаком.
Например, для суммы моментов относительно точки A
получаем
![]()
или, что одно и то же
![]()
Здесь m(F) – моменты сил F относительно точки A.
M(q) – моменты распределенных нагрузок q относительно рассматриваемой точки.
При составлении уравнений равновесия статичных (неподвижных) систем (например, при определении опорных реакций), последние два правила упрощаются до вида:
Проекции сил и моменты, имеющие одинаковое направление принимаются положительными, а соответственно проекции сил и моменты обратного направления – отрицательными.
Решение задач на равновесие плоской и пространственной системы сил
Пример 1 Балка ![]() длиной
длиной ![]() укреплена тремя стержнями, как показано на чертеже. На балку действует сила
укреплена тремя стержнями, как показано на чертеже. На балку действует сила ![]() .
.
Определить усилия в стержнях, считая соединения стержней с балкой и опорой шарнирными. Весом балки пренебречь.
Дано: ![]() .
.
Найти: ![]() ,
, ![]() ,
, ![]() .
.
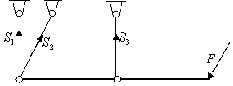
Решение: Расставим на рисунке все силы, действующие на плиту. Рассмотрим отсутствие вращения плиты вокруг точки:
![]() ,
,
Откуда выразим реакцию ![]() :
:
![]() .
.
Рассмотрим равновесие относительно оси ![]() :
:
![]() ,
,
Откуда выразим реакцию ![]() :
:
![]() .
.
Рассмотрим равновесие относительно оси ![]() :
:
![]() ,
,
Откуда выразим реакцию ![]() :
:
![]() .
.
Пример 2. Определить опорные реакции балки (рис. a), концы которой шарнирно закреплены. Балка нагружена парой сил с моментом ![]() кНм.
кНм.
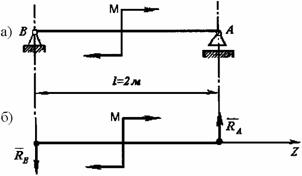
Решение. Наметим направление реакций опор (рис. б). Так как к балке приложена пара сил, то и уравновесить ее можно только парой сил. Следовательно, реакции опор равны между собой по величине, параллельны, но противоположно направлены. Заменим действие опор их реакциями. Правая опора А - плоскость, следовательно, направление опорной реакции RA перпендикулярно этой плоскости, а опорная реакция RB ей параллельна и противоположно направлена. Балка находится в равновесии, поэтому сумма моментов пар сил, приложенных к ней, равна нулю:
![]() ,
,
откуда
![]() кН.
кН.
Ответ: ![]() кН.
кН.
Пример 3. Брус АВ с левой шарнирно-подвижной опорой и правой шарнирно-неподвижной нагружен тремя парами, моменты которых ![]() кНм,
кНм, ![]() кНм,
кНм, ![]() кНм. Определить реакции опор.
кНм. Определить реакции опор.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
