

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Необходимо отметить, что процедура препарирования окклюзионной поверхности зубов имеет важное значение для обеспечения их функциональной эффективности и долговечности ортопедических конструкций, что делает востребованным точный контроль препарирования зубов. Предложенный нами метод позволяет повысить точность препарирования и протезирования и осуществлять контроль над окклюзионными соотношениями противоположных зубных рядов, и тем самым улучшить качество лечения ортопедических больных.
Литература
1. Клинико-экспериментальное обоснование препарирования оклюзионной поверхности зубов при ортопедическом лечении несъемными протезами. Автореф. дис. … канд. мед. наук. М., 2011. 23 с.
2. , , Способ контроля препарирования окклюзионной поверхности зубов при ортопедическом лечении несъёмными протезами. Патент РФ на изобретение № 000, опубл. в Бюл. № 23 от 20. 08. 2010.
3. , , Способ воспроизведения зарегистрированных окклюзионных положений на компьютерных трёхмерных моделях зубных рядов и ориентации компьютерных трёхмерных моделей в пространстве. Патент РФ на изобретение № 000, опубл. в Бюл. .
4. , , Способ измерения размеров зубов, зубных бугров и их внутренних и наружных скатов. Патент РФ на изобретение № 000, опубл. в Бюл. № 1 от 01.01.2001.
_________◊_________
Программно-аппаратный комплекс для получения и анализа компьютерных трёхмерных моделей зубных рядов
, к. т.н., , д. т.н.
НПП «Квант»
, д. м.н., , к. м.н.
МГМСУ им.
•
При лечении несъемными зубными протезами одной из важнейших клинических процедур является одонтопрепарирование [1]. При этом формирование необходимого точного рельефа зубной поверхности и контроль окклюзии связано с определенными трудностями, обусловленными отсутствием современных технических средств. Поэтому применение компьютерных трехмерных технологий является перспективным направлением для получения данных о расположении и соотношении ключевых ориентиров на зубах и зубах-антагонистах [2, 3].
Для решения задач построения трехмерных моделей зубных рядов система бесконтактных измерений должна соответствовать таким требованиям, как большая точность измерений (не менее 0,05мм), достаточная плотность измерений точек поверхности для адекватного воспроизведения важных деталей поверхности зуба (не менее 25 точек/мм2), высокая степень автоматизации процесса измерений для обеспечения высокой производительности измерений.
Аппаратная часть, используемая для построения трехмерных моделей зубных рядов, как и большинство цифровых видеометрических систем бесконтактных измерений, включает 2 видеокамеры PULNiX-TM260NIR на базе ПЗС матриц, которые комплектуются платой захвата изображения для шины PCI, а также необходимым программным обеспечением, которое включает в себя библиотеки функций и интерфейс управления камерой; плату захвата телевизионного сигнала с телекамеры и преобразования изображений в цифровой вид PIXEL – IIIM; мультимедийный проектор SVGA Hitachi CP-X430, формирующий структурированный подсвет [4].
Для расчёта трехмерных координат объекта осуществляется определение положения съемочных камер в заданной системе координат (применяется метод внешнего ориентирования по известному тестовому сюжету). Далее решается задача стереоотождествления - нахождения на стереопаре изображений соответственных точек, применяя структурированный подсвет объекта в виде одной вертикальной контрастной линии. Соответственными являются точки изображения, лежащие на эпиполяре и имеющие максимальную яркость. Для высокоточного измерения заданных точек используется алгоритм субпиксельного нахождения координат подсвеченных точек. Далее осуществляется определение координат измеряемых точек объекта на изображении из условий коллинеарности, что позволяет построить так называемое «облако» трехмерных координат точек объекта.
Для решения задачи расчета трехмерных координат измеряемого объекта используются внешняя система координат, связанная с объектом, и система координат, связанная со снимком. Решается уравнение центральной проекции, называемое условием коллинеарности. Вычисляются координаты точек снимка, принадлежащих линии, с учётом яркости пикселей.
Для проведения анализа смыкания зубов с использованием компьютерных трехмерных моделей необходимо, чтобы виртуальные зубные ряды (компьютерные трехмерные модели зубных рядов) находились в том же положении друг относительно друга, что и зубные ряды пациента в заданной окклюзии. Методика приведения виртуальных зубных рядов в заданное относительное положение включает следующие этапы:
- сканирование гипсовой модели верхнего зубного ряда; сканирование гипсовой модели нижнего зубного ряда; установка гипсовых моделей верхнего и нижнего зубных рядов в заданное сомкнутое положение в артикуляторе, используя силиконовые шаблоны; сканирование видимой поверхности гипсовых моделей зубных рядов в заданном положении и получение опорной поверхности, соответствующей внешней поверхности зубных рядов в окклюзии; приведение виртуальных зубных рядов в заданное относительное положение с использованием опорной регистрирующей поверхности.
Сканирование гипсовых моделей верхнего и нижнего зубных рядов выполня-ется фотограмметрическим комплексом, описанным выше.
Далее с использованием того же комплекса сканируются гипсовые модели в заданном положении с получением опорной регистрирующей поверхности (рис. 1).
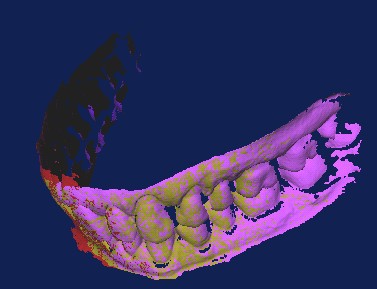
Рис. 1. Вид опорной регистрирующей поверхности.
Для сопоставления поверхностей используется итеративный алгоритм поиска ближайших точек сопоставляемых поверхностей (iterativeclosestpointalgorthm).
Программная часть используемого комплекса разработана и предназначена для анализа окклюзии зубных рядов, и выполняет следующие основные функции:
- Загрузка трехмерных моделей зубных рядов. Визуализация и манипулирование (перемещение, вращение, приближение/удаление трехмерной модели). Приведение трехмерной модели в стандартное положение, соответствующее положению в артикуляторе. Построение сечений трехмерной модели зубных рядов. Визуализация и сохранение построенных сечений. Выполнение измерений заданных размеров в построенных сечениях. Сохранение результатов измерений. Сохранение проекта работы с трехмерной моделью зубных рядов.
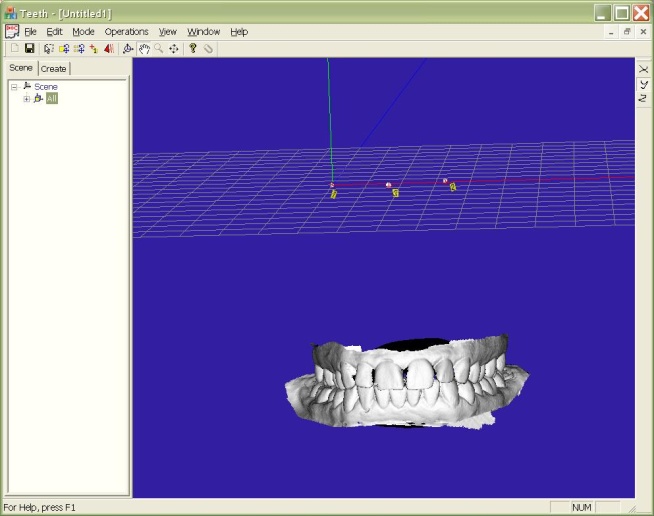
Для приведения модели в исходное положение служит пункт меню Процесс |Transform. Предварительно на модели должны быть расставлены опорные маркеры (см. рис. 2), определяющие плоскость, к которой приводится модель.
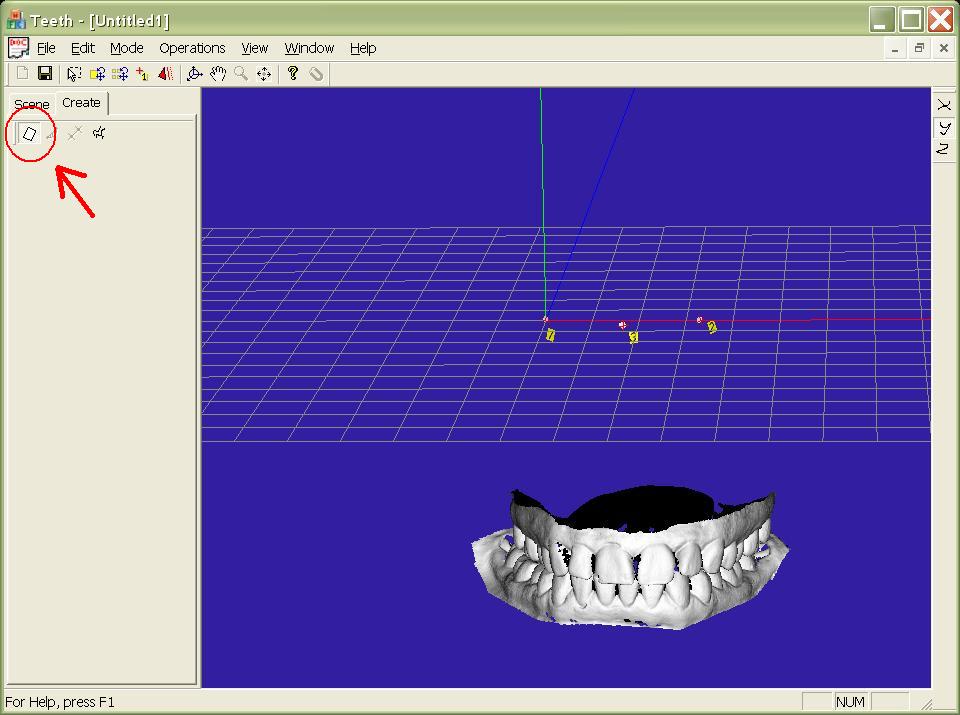
Для построения сечений модели используется инструмент «Сечение».
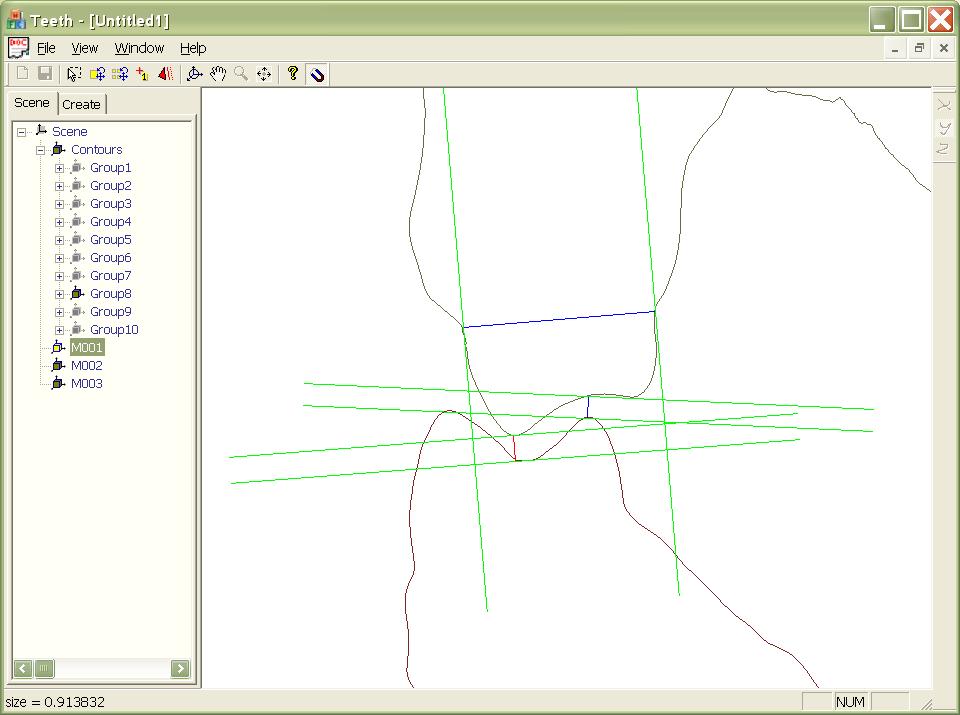
После выбора инструмента «Сечение» курсор принимает форму маркера. Для определения сечения используются три точки, задаваемые оператором на модели, как показано на рис. 4.
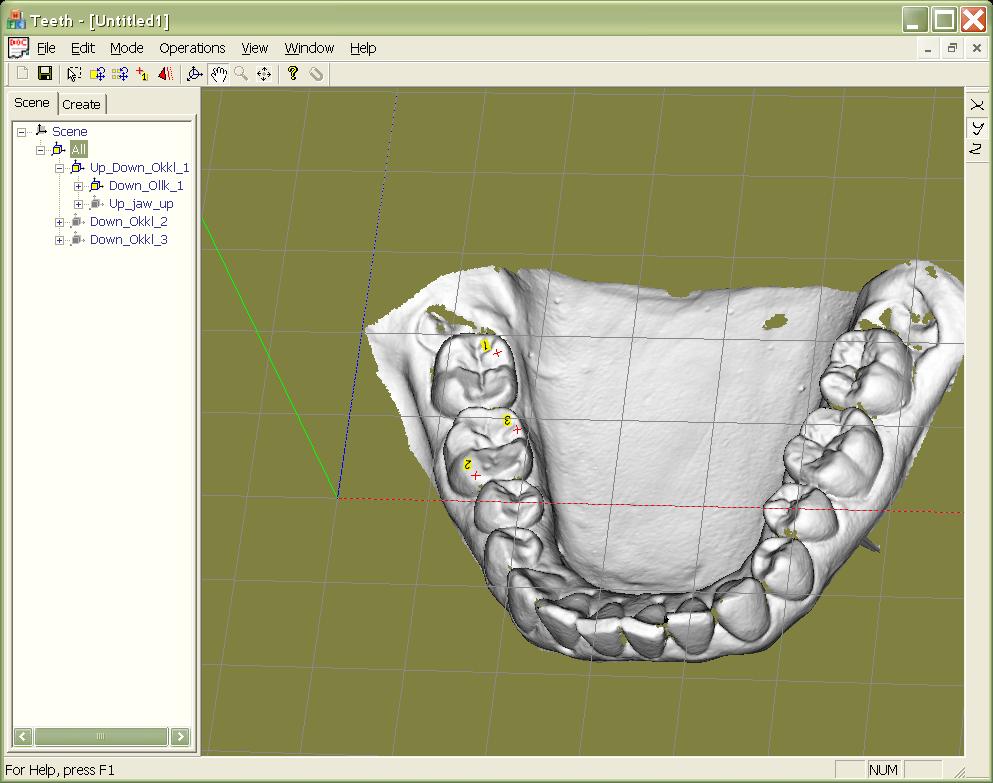
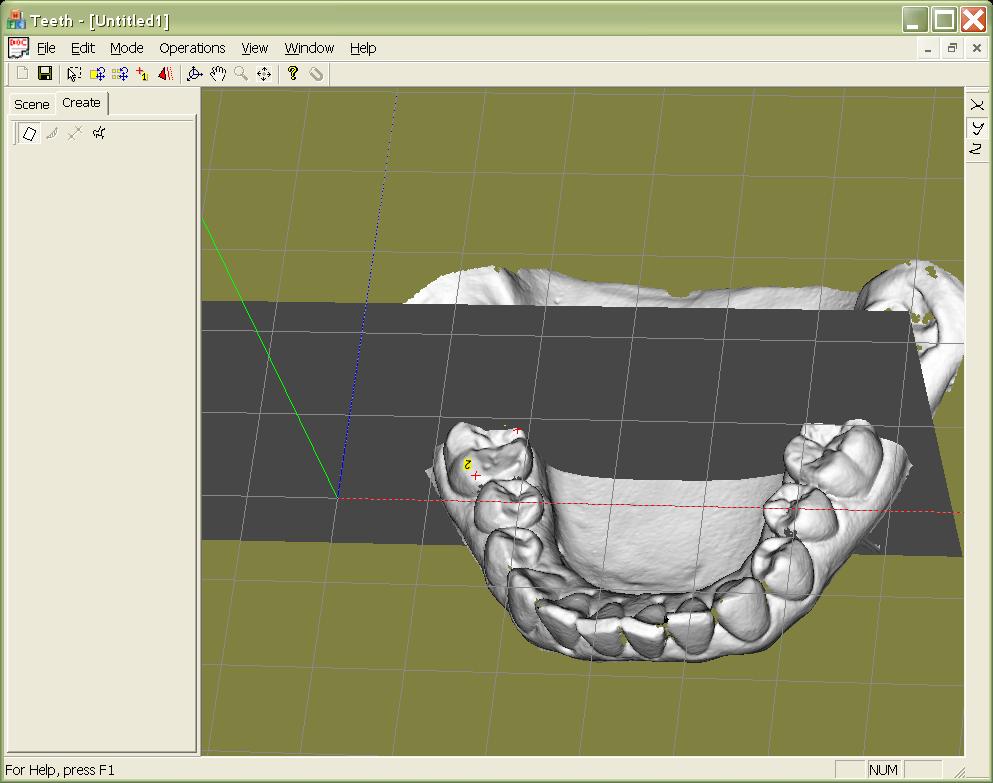
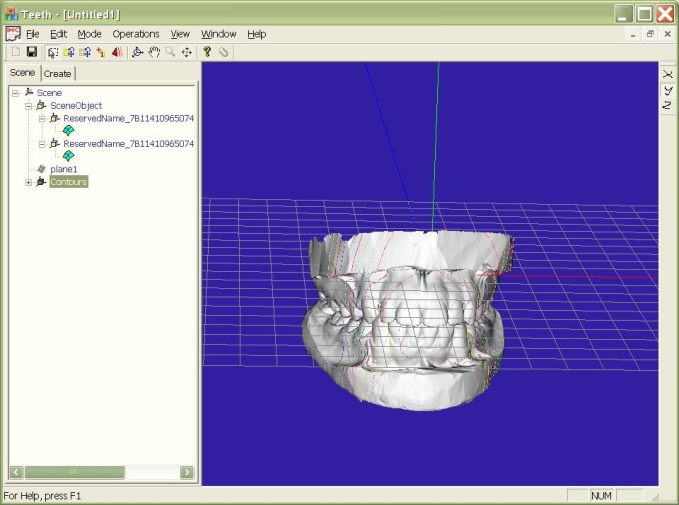
Первый и второй маркер определяют нормаль плоскости сечения, а третий маркер – точку, через которое проводится сечение. Результат работы инструмента «Сечение» показан на рис. 5.
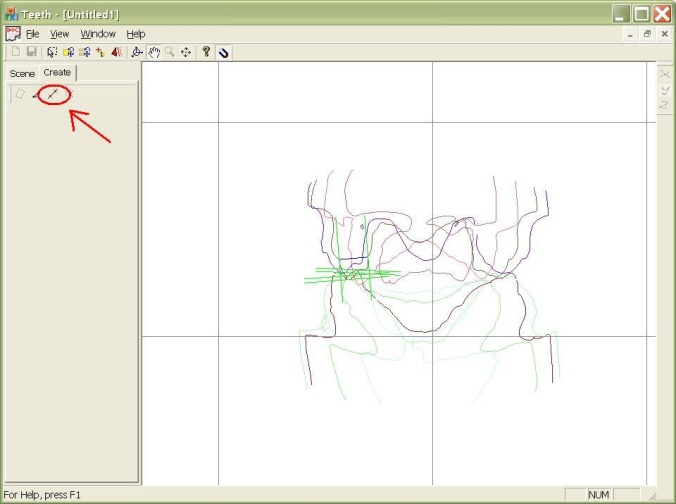
Сечения, полученные вдоль нормали, отображаются на трехмерной модели (рис. 6) и могут быть отображены в секущей плоскости (рис. 7).
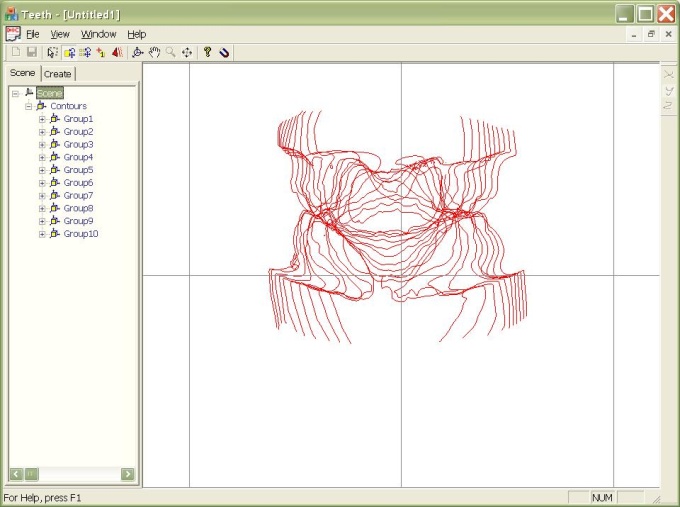
В секущей плоскости можно провести измерения расстояний между заданными точками зубного ряда. Для измерений служит инструмент «Линейка».
Измерения отображаются в панели дерева объектов, результат измерения – в строке состояния приложения. Результаты измерения сохраняются в формате, совместимом с MSExcel, для последующего статистического анализа.
Описанный программно-аппаратный комплекс позволяет успешно реализовать получение компьютерных трёхмерных моделей зубных рядов, сопоставления их в соответствии с зарегистрированным окклюзионным положением. Программное обеспечение, предназначенное для проведения измерений на сечениях компьютерных трёхмерных моделей зубных рядов, решает задачу получения точных данных для анализа окклюзионных взаимоотношений, что является одной из насущных проблем в современной стоматологии. Внедрение указанного комплекса позволяет значительно повысить качество ортопедического лечения пациентов.
Литература
1. Одонтопрепарирование. Саратов, 1983, 350 с.
2. , Окклюзия как показатель смыкания зубов//Сathedra – стоматологическое образование, № 32, зима 2009 - 2010. С. 54 - 55.
3. , , Способ воспроизведения зарегистрированных окклюзионных положений на компьютерных трехмерных моделях зубных рядов и ориентации компьютерных трехмерных моделей в пространстве. Патент РФ на изобретение № 000, опубликовано в бюллетене № 28 от 10. 10. 2010 г.
4. , , Средства получения и анализа компьютерных трехмерных моделей зубных рядов//Сathedra – стоматологичес-кое образование, № 33 - 34, осень-зима 2010 - 2011. С. 58 - 61.
_________◊_________
Сдано в набор 11.02.2013 г. Подписано в печать 5.08.2013 г.
Формат 60 х 84 1/8. Бумага писчая № 0.
Гарнитура «Таймс нью роман».
Отпечатано на ризографе.
Уч.-изд. л. 8,5.
Заказ № 000.
Адрес редакции: 129 626, Москва, 3-я Мытищинская ул., д. 16.
Телефон редакции: 8 (495) 687-98-44
Отпечатано в НПП «Квант»
_________◊________

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
