

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Из результатов расчета следует, что для использования потенциальной чувствительности автоколлиматора на уровне 0.001 угл. сек. температурный перепад в зрачке не должен превышать тысячных долей градуса, а температурная стабилизация помещения должна быть на уровне ± 0.01°С. При этом расстояние от объектива до зеркала не должно превышать 50-100 мм. Очевидно также, что точность измерений с помощью автоколлиматора определяется идентичностью условий, в которых проводятся калибровка и измерения. Полученные требования к температурной стабилизации согласуются с данными лаборатории угловых измерений PTB (Германия).
В связи с тем, что не всегда возможно реализовать высокий уровень температурной стабилизации и минимизацию градиентов, в программе автоколлиматора предусмотрен режим измерений с учетом температурных трендов. Поскольку каждое измеренное значение есть результат усреднения по значительному числу отдельных кадров, в программу вычисления среднего значения по циклу измерений был введен модуль вычисления линейной регрессии. Коэффициент tφ перед линейным членом в уравнении линейной регрессии отражает тренд результатов измерения и может быть использован для их коррекции. В этом случае величина угла определяется по формуле:
 ,
,
где φ1, φ2 – отсчеты при 1 и 2 положениях зеркала, tφ1, tφ2 – значения тренда, измеренные при 1 и 2 положениях зеркала, T – временной интервал между 1 и 2 отсчетами.
Стандартное отклонение результата измерения для 2 отсчетов определяется выражением
 ,
,
где σφ1, σφ2 – стандартное отклонение результата измерения для 1 и 2 отсчетов соответственно, σt – стандартное отклонение измерения тренда. Экспериментальная оценка σt составляет 0.0011 угл. сек./мин. (при длительности цикла измерений 1 минута). Неопределенность измерений ЦАУ (при температурной стабилизации ± 0.01°С, в диапазоне ± 5 угл. сек.) 0.01 угл. сек.
Направление прохождения излучения в среде даже в лабораторных условиях на длинах порядка метра составляет доли и единицы угловых секунд. Математика базируется на определении отклонениях от соосности.
Атмосферная составляющая суммарной погрешности измерений часто рассчитывается по дифференциально-амплитудному методу измерения соосности агрегатов. В этом методе, положение источника излучения, относительно оптической оси, определяется из так называемой пеленгационной характеристики.
где ub - оптический сигнал, вырабатываемый устройством, k – коэффициент пропорциональности, зависящий от размера изображения и ряда других параметров устройства, ui (b) (i=1,…,4) – электрический сигнал, снимаемый с i-го квадранта четырехэлементного координатно-чувствительного приемника, величина которого зависит от углового положения b объекта относительно оси приемника.
Рассматривается дисперсия флуктуации пеленгационной характеристики в равносигнальном управлении (среднее значение <ui>=<u> и дисперсии s2u=<u2i>-<u>2 с любого i–го квадранта одинаковые) в предположении слабых флуктуаций сигналов (su/<u>)<<1 либо производится сглаживание (временное усреднение) в знаменателе. Оба предположения существенно ограничивают область применимости к реальным ситуациям. Предполагается, что флуктуации сигналов ui=ui-<ui>, за счет атмосферной турбулентности полностью коррелированны и разностный сигнал у числителе, обусловлен только шумами приемника. Однако корреляция сигналов за счет турбулентности заметно отличается от единицы. Следовательно, результаты не будут соответствовать большинству реальных атмосферных ситуаций. Лишь в крайних случаях полной корреляции флуктуации интенсивности и на диаметре выходной аппертуры устройства можно ими пользоваться. Рассмотрим произвольный по величине случай флуктуации сигналов ![]() без существенных ограничений. Это позволит оценить влияние турбулентности атмосферы на точность оперативного определения угловых координат для большинства атмосферно- оптических ситуаций при известных характеристиках фллуктуации потока в плоскости расположения координатно-чувствительного приемника.
без существенных ограничений. Это позволит оценить влияние турбулентности атмосферы на точность оперативного определения угловых координат для большинства атмосферно- оптических ситуаций при известных характеристиках фллуктуации потока в плоскости расположения координатно-чувствительного приемника.
Запишем пеленгационную характеристику ub в эквивалентном виде:
![]()
![]()
где P1(b), P2(b) – сигналы пропорциональные потокам излучения, попадающим на левую P1=u1+u2 и правую P2=u3+u4 половины координатно-чувствительного приемника. Из-за влияния турбулентности атмосферы потоки P1(b) и P2(b) флуктуируют в общем случае не синхронно и как случайные величины характеризуются средними значениями <Pi> (i=1,2) и дисперсиями s2pi=<Pi2>-<Pi>2. Они зависят от условий турбулентности на трассе, ее длины, условий приема и т. д. Будем считать величины lnP1, lnP гауссовыми случайными переменными, распределенными по двумерному W(lnP, lnP) нормальному закону:

с параметрами


Применяя правило преобразования двумерных плотностей вероятностей функционально связанных случайных величин Pj и lnPj :

где  - модуль якобиана преобразования, полученных после простых вычислений плотностей вероятностей W(P1,P2) сигналов Р1 и Р2 в виде:
- модуль якобиана преобразования, полученных после простых вычислений плотностей вероятностей W(P1,P2) сигналов Р1 и Р2 в виде:

 Естественно сами сигналы будут распределены логарифмически нормально:
Естественно сами сигналы будут распределены логарифмически нормально:

что хорошо согласуется с экспериментальными данными.
Связь между величинами μj, σj, R1,2, с другой стороны, нетрудно получить, исходя из плотностей вероятностей:
![]()
Чтобы получить плотность вероятностей пеленгационной характеристики W(uβ), введем следующую переменную P=(P1+P2)/2. Тогда получим P1=(1-uβ)/P, P2=(1+uβ)/P; якобиан преобразования от переменных P1, P2 к переменным uβ, P:
Используя правило преобразования плотностей W(P1,P2) и W(uβ,P), аналогичное (3), и проводя интегрирование по переменной Р, можно после громоздких вычислений получить следующее выражение для одномерной плотности вероятности W(uβ) пеленгационной характеристики:
uβ<1.
Плотность вероятностей W(uβ) значительно отличается от нормальной при больших дисперсиях и малой корреляции. Для определения границ измерения угломерной ошибки uβ от (-1...k1) за счет турбулентности атмосферы с заданной вероятностью получим интегральную функ цию флуктуации F(k1) пеленгационной характеристики:  где erf(x) – функция ошибок.
где erf(x) – функция ошибок.
Приближенное выражение для средних квадратичных σuR значений флуктуации пеленгационной характеристики в равносигнальном направлении <P>=<Pj>, σPj=σP и слабых относительных флуктуациях потока (σP/<P>)<<1 в виде
Точные средние квадратичные значения величины σuR
Сравнение приближенных и точных результатов показывает, что при σ=0.1 и значении коэффициента корреляции R в диапазоне 1<R≤0.9 приближенное в среднем примерно на 25% занимает величину ошибки при оперативном измерении угловых координат.
При увеличении флуктуации σ (2-σ2=0.3; 3- σ2=0.5; 4- σ2=0.7) погрешность увеличивается. Таким образом, распространение излучения (однородные трассы), сглаживание сигналов приводит к существенному уменьшению погрешности измерения угловых координат.
7. 3D системы формирования изображений
Значительно больший объем информации по сравнению с плоскими изображениями несет в себе описание объектов в 3D пространстве. Оно позволяет увеличить достоверность сцен, упростить процедуры распознавания и т. п.
Большое количество программ позволяют создавать и редактировать трёхмерные сцены и объекты. Все имеющиеся программы можно разделить на две неравные группы. Первая - интегрированные решения. Вторая - специализированные пакеты либо для создания (редактирования) объектов и сцен, либо для окончательного рендеринга. Интегрированные пакеты предлагают полный набор функций, они предпочтительны для тех, кому необходим быстрый результат при минимальных затратах. В качестве примера можно привести 3D Max, и более простые Bryce или Xara 3D. Профессионалы, например в киноиндустрии, используют отдельные программы для моделирования и отдельные - для рендеринга. Скажем, Mental Ray применяют для визуализации созданных в Softimage сцен. Среди специализированных приложений встречаются предназначенные только для обработки поверхности объектов - Painter 3D -- или, наоборот, создания одного типа объектов -- MECN Tree Factory. Перспективны и программы создающие трехмерные объекты из фотографий, способные генерировать фотореалистичные текстуры, словом, делать заготовки для дальнейшего использования в других приложениях.
Следующая категория - наследники САПР. Их отличительные черты: четырехоконный интерфейс (три проекции плюс вид из виртуальной камеры), обилие числовых параметров и меню, относительная сложность в использовании. Вместе с тем это программы, рассчитанные на профессионалов, они обеспечивают очень высокое качество моделирования и рендеринга, позволяют подключать дополнительные модули для реализации отсутствующих функций. Эти приложения требуют от автора четкого представления о результате и способах его достижения. В качестве примеров можно привести LightWave 3D или Infini-D, можно использовать двояко -- для изготовления графических элементов (заголовки, кнопки и т. п.) и создания действительно трехмерного мира по стандартам VRML. В качестве примера можно привести соответственно Simply 3D и InterSpace VR. Большинство современных программ использует алгоритм трассировки лучей для достижения максимального реализма сцены. Более быстрые (но и менее качественные) методы Гуро и Фонга применяются в основном для предварительного просмотра шероховатости поверхности и сложность юстировки.
Основой метода с анализом деформации изображения периодической структуры (метода структурного освещения) является проецирование изображения светового пучка известной структуры на поверхность объекта. Контролирующая CCD-камера считывает находящееся в её поле зрения структурное изображение, деформирующееся в соответствии с локальным градиентным профилем поверхности. В качестве периодических структур могут применяться изображения растра и дифракционной решётки, а также интерференционные картины от сложения когерентных световых пучков.
Наиболее широко используется многоточечное структурное освещение, заключающееся в дискретном представлении светового сигнала в виде двухмерной матрицы гауссовых пучков, сформированной при помощи киноформных элементов, например, двух скрещенных решёток Даманна. Распределение светового потока J(x, h) в многоточечном структурном освещении описывается суперпозицией гауссовых пучков с равными интенсивностями:
 ,
,
где x, h – координаты в поперечном сечении энергетических центров гауссовых, в частности, лазерных пучков, N, М – число пучков вдоль осей x и h соответственно; ∆x, ∆h - расстояния между центрами пучков; σ - полуширина гауссовых пучков (σ<<∆x, σ<<∆h). При этом, во всем диапазоне DX ≈ N∆x, DY ≈ М∆h наблюдается "равномерное" освещение в выделенных точках, и, благодаря малой расходимости лазерных пучков, реализуется "глубокий" измерительный объем – DZ » DY » DX.
На объекте и на изображении, регистрируемом CCD-матрицей, параллельные световые пучки создают картину деформированных световых пятен. Для нахождения пространственных параметров объекта используется следующая последовательность действий. Сначала из анализа растрового изображения находятся энергетические центры световых пятен. Затем производится идентификация "световых пятен" по отношению к "световым пучкам", что означает поиск индексов смещения соответствующего пучка по двум ортогональным направлениям в матрице источника. При известных величинах ∆x, ∆h, индексы смещения однозначно задают пространственные уравнения лучей освещения. Одновременно, координаты центров световых пятен и параметры, найденные в процессе калибровки, определяют уравнения лучей наблюдения. Для двух лучей – освещения и наблюдения (ti и to) всегда можно определить параметры ЗD-отрезка, соответствующего минимальному расстоянию между ними. Середина найденного отрезка соответствует освещенной точке на поверхности объекта, а его длина определяется точностными характеристиками системы. Далее, полученный набор пространственных координат дискретных точек позволяет восстановить форму поверхности.
При измерении композиции объектов, последовательное определение формы каждого фрагмента позволяет вычислять индивидуальные макропараметры: относительные сдвиги, повороты, локальные изменения масштабов и т. д. А для композиции в целом – находить пространственные геометрические параметры изделия, что позволяет судить о качестве изготовления и сборки как всего изделия в целом, так и отдельных его элементов. Оптимальной формой описания поверхности (измеряемого класса объектов) является пространственная квадратичная форма от трех переменных X, Y,Z:
S(X, Y,Z) =QXXX2 +QXYXY+QXZXZ+QYYY2+QYZYZ+QZZZ2+QXX+QYY+QZZ+QO
Представление S(X, Y,Z) достаточно хорошо аппроксимирует информативные фрагменты объектов и включает в себя такие свойства поверхностей как метрика и кривизна, кроме того, количество получаемых на изображении световых пятен (≈ 150) обеспечивает надежное определение коэффициентов Qij, с приемлемой степенью точности. Используемые квадратичные формы допускают как полиномиальное, так и параметрическое представления. Это обстоятельство позволяет существенно расширить математический аппарат для вычисления пространственных геометрических характеристик измеряемых объектов. Упрощенная схема системы, базирующейся на методе многоточечного структурного освещения, и предназначенной для комплексного контроля основных геометрических размеров циркониевых дистанционирующих решеток атомного реактора. Система включает оптическую измерительную головку, двухкоординатный стол, компьютер и другие вспомогательные узлы. Трехканальная измерительная головка состоит из осветителя, формирующего три набора матриц лазерных пучков (размерность 12´13 пучков, периоды: ∆x = 0.2 мм, ∆h = 0.52 мм), которые направляются под углом 30° на внутренние поверхности ячейки и приемного модуля, состоящего из трех объективов в трех CCD-камер, работающих совместно с видеобуферами SILICON VIDEO MUX. Двухкоординатный стол OFL-2121SM снабжен лазерным измерителем перемещений, что позволяет позиционировать дистанционирующую решетку по двум ортогональным направлениям и определять его текущие координаты с погрешностью l/8.
Дистанционирующая решетка представляет собой набор более 300 ячеек, в которые вставляются тепловыделяющие элементы атомного реактора. Контролируемые параметры ячеек – это их d, позиционные отклонения центров этих окружностей и другие параметры. Внутренняя поверхность ячейки ЦДР описывается в виде совокупности плоских и цилиндрических фрагментов, причем информативными (с точки зрения измерения параметров вписанной в ячейку окружности) являются три сегмента квазициллиндров. Сегменты ячеек освещаются матрицами лазерных лучей, а изображения регистрируются CCD - камерами. Совместная обработка данных, полученных от трех сегментов, позволяет определять взаимное расположение этих сегментов в пространстве и вычислять параметры вписанной между ними окружности при любом сечении по высоте.
Система измеряет диаметры всех вписанных окружностей в отверстия, среднее межцентровое расстояние - L, вычисляет позиционные отклонения центров, сравнивает все измеренные размеры с полями допусков и выдает признак годности ЦДР в целом. Средние квадратические погрешности измерения на макете системы составляли: для диаметров вписанных окружностей 3.1 мкм, для координат центров 2.8 мкм.
Методу анализа деформации изображения периодической структуры присущи затенение неоднородностей, находящихся за выступами, сглаживание впадин и сложность цифровой обработки деформированного изображения. Несмотря на некоторые серьёзные недостатки: низкие быстродействие и надёжность в эксплуатации, узкий диапазон измеряемых поверхностных высот, затруднение при считывании ступенчатой формы, а также возможное повреждение объекта, механические сканеры представляют интерес из-за относительно невысокой их стоимости. В основу таких устройств положено контактное измерение поверхности с помощью пьезодатчиков или всесторонне сжимающего предмет механизма. По вырабатываемым пьезодатчиками сигналам определяются координаты текущих точек на поверхности. В случае сжимающего механизма координаты находятся по углам поворотов роторов, вращающих диски, которые тормозятся в момент их контакта с поверхностью объекта.
Проведённые исследования показывают, что между оптическими и механическими методами существует полная корреляция по точности измерения глубины поверхности. Однако, в диапазоне поверхностных глубин до 2.0 мкм контактные приборы оказываются точнее. Разработанный в 1983 г. Биннингом и Рорером растровый туннельный микроскоп обеспечивает разрешение на уровне атомов, в чём отстают оптические приборы. Это связано, в основном, со сглаживанием последними крутых склонов. В оптике для коррекции точности измерений, классификации исследуемых поверхностей вводится легко определяемый в процессе эксперимента параметр ![]() , описывающий “грубость” поверхности – её способность рассеивать падающее излучение:
, описывающий “грубость” поверхности – её способность рассеивать падающее излучение:
где ![]() - угол между вертикалью и рассеянным лучом;
- угол между вертикалью и рассеянным лучом;
![]() - интенсивность излучения, рассеивающегося в угол
- интенсивность излучения, рассеивающегося в угол ![]() ;
;
![]() - первый момент распределения интенсивности по углу рассеяния;
- первый момент распределения интенсивности по углу рассеяния;
![]() - суммарная интенсивность рассеянного излучения;
- суммарная интенсивность рассеянного излучения;
![]() - нормирующий множитель.
- нормирующий множитель.
Основа конфокального метода считывания формы поверхности трёхмерного объекта – регистрация изменений формы или энергии отражённого объектом излучения при смещении участка поверхности в направлении зондирования. Благодаря использованию диафрагмы с малым отверстием перед одноэлементным фотоприёмником, регистрация интенсивности попадающего на него света позволяет обнаруживать весьма малые аксиальные смещения поверхности объекта в точке, совпадающей с центром фокального пятна. Конфокальный прибор в данном случае выполняет роль неконтактного оптического датчика локального смещения поверхности объекта от фокальной плоскости. Интенсивность рассеянного света зависит от коэффициента отражения поверхности, формы рельефа.
Среди конфокальных приборов широкое распространение получила схема с двумя фотоприёмниками – схема Саймана и её модификации. Они высокоточные в определении координат точек поверхности и наиболее близки к достижению минимально теоретически возможного предельного разрешения, связанного с неопределённостью измерения линейных размеров. Согласно теореме Инглштама:

где Δx – неопределённость измерения горизонтальных размеров, A=sin α – апертура объектива, l - длина волны падающего на объект излучения.
Таким образом, уменьшение числовой апертуры выходного зрачка не всегда приводит к увеличению разрешения прибора. На практике наибольшее распространение получило значение апертуры, примерно равное 0.45. Недостатком многих конфокальных приборов является их параметрическая нестабильность во время работы вследствие изменения температурного режима. Погрешность может достигать до нескольких десятых долей микрометра. Кроме этого, устройства в той или иной степени чувствительны и к изменению индикатрисы отражения участков поверхности объекта.
В основу туннельного метода положен оптический туннельный эффект. Отражаемое объектом канализированное излучение собирается оптической системой и формируется изображение, в котором поверхностная неоднородность проявляется в виде изменения яркости. Метод способен разрешать поверхность вплоть до атомов.
Суть импульсного дальнометрического метода состоит в генерации последовательности световых импульсов, направляемых в локальную область поверхности объекта, и измерении времени его прохождения от источника до поверхности и обратно.
Одна из реализаций этого метода на базе лазерного датчика показана на рис. 7.1. На котором показаны: 1 – ОКГ, 2 – модулятор-сканер, 3 – оптика, 4– индикатор, 5 – приёмник, 6 – объект.
Излучение ОКГ после модуляции СВЧ-колебаниями и формирования требуемой диаграммы направленности оптической системой попадает на исследуемый объект. При распространении оптического излучения по трассе излучатель – объект – приёмник как оптическая несущая, так и СВЧ-поднесущая получают соответствующие фазовые набеги. Наличие СВЧ-фазометров позволяет относительно просто выделить фазовый набег СВЧ-поднесущей и тем самым измерить координаты точки на объекте. Таким образом, лазерный датчик по фазе СВЧ-поднесущей содержит ОКГ, модулятор с источником модулирующих СВЧ-колебаний, оптические системы передатчика и приёмника. Для формирования набора координат схема дополняется сканером. В качестве индикатора используется фазометр и система, регистрирующую изменения фазы СВЧ-поднесущей при движении луча ОКГ по поверхности объекта. Схема лазерного дальнометрического измерителя поверхности:
Рис. 7.1. Импульсный дальнометрический метод
С помощью импульсного дальнометрического метода, как правило, определяются только координаты точки на поверхности объекта. Для нахождения же угла наклона участка поверхности по отношению к оптической оси излучателя его сочетают с триангуляционным или автоколлимационным методом. Встречающийся в литературе метод отсечки света есть не что иное, как композиция триангуляционного и проекционного методов.
Метод триангуляции тесно связан с конфокальным, автоколлимационным и методом анализа деформации периодической структуры или одиночной точки. Принято обобщать триангуляцию, включая в неё и метод анализа деформации периодической структуры.
Генерирует пучок излучения, который направляется на поверхность объекта. Любая поверхность наделена определённой микроструктурой. Поэтому, процесс отражения удобно описывать индикатрисой, моделируемой сферой либо модулированным гауссоидой n-листником. Отражённая система пучков принимается камерой.
Одна из реализаций которого изображена на рис.7.2. Его достоинствами являются простота вычисления координат. Идея метода отражает явное или неявное присутствие в схеме треугольника (triangle). Количество излучателей обычно равно двум, но при некоторых допущениях, учитывая симметрию схемы, его можно уменьшить до одного. В качестве оптических зондов обычно используются точки – оптические пятна малых размеров либо плоские пучки света – оптические полосы малой толщины.
(а) |
|
 (б)
(б)Рис. 7.2. Триангуляционный сканер формы объектов и считываемое изображение
Улучшенный метод активной оптической триангуляции заключается в освещении объекта, формировании изображений объекта и их регистрации, отличающийся тем, что с целью повышения точности определения Z – координаты формируется, по крайней мере три освещающих пучка:
n Однородный, соосный с осью регистрации,
n и два боковых, направленных под противоположными углами к оси регистрации,
регистрируются, по крайней мере три кадра, каждый при включенном одном источнике,
n в двух боковых освещающих пучках формируют на объекте изображения меток,
n повторяют операции с эталонной поверхностью,
n по смещению меток определяют отклонения по Z от эталонной поверхности.
Боковые пучки формируют, как правило, встречно нормалям к основным участкам поверхности объектов, например, щекам лица человека. Форма зонда может представлять собой массив ярких точек с периодом близким к предельно разрешимому для комплексной системы: осветитель - объект - регистратор. В более простых системах зондирующие лучи передают форму осветителя, например, площадок диодов матрицы, по одним участкам структуры, например, по темному провалу определяют оценку Z координаты, по другим, например, изменениям изображения излучающего квадрата от центра площадки - составляющие вектора нормали к освещенному участку, по комплексному описанию строят поверхность.
Схема прибора приведена на рис. 7.3. Фрагменты изображений и графики сигналов приведены на рис. 7.4, 7.5, 7.6. В данном случае в качестве зонда используется массив ярких точек с периодом близким к предельно разрешимому для комплексной системы: осветитель - объект - регистратор. Это обеспечивает придельное разрешение пространственных частот сигналов описывающих контролируемую форму поверхности.
В более простых случаях допустимо снижение разрешения путем применения более простых излучателей, упрощения оптической части систем.
Наиболее часто в качестве излучателей сегодня используются светодиоды. Технология их изготовления такова, что в середине излучающей площадки образуется провал по яркости. На рис. 7.7. и рис. 7.8. показана последовательность операций по обработке таких сигналов.
Вычитание изображения при выключенном осветителе меток с последующей сверткой в крест дает отчетливо различимые импульсы, ширина которых определяет углы наклона плоскостей в направлениях построения трехмерной оболочки объекта.
1,3,4 - излучатели, 2 - регистратор, 5 – объект
Рис. 7.3. Схема прибора
При считывании формы объектов находящихся в движении существенную погрешность вносит смаз изображения, для его устранения можно ввести импульсную модуляцию зондирующих световых пучков. Если одновременно освещать участок поверхности пространственно опережающим узким световым пучком и формировать на поверхности триангуляционный зонд, то можно уменьшить влияние смаза. По считанным одиночным относительно редким (в зависимости от текущей Z-координаты) профилограммам интерполируется распределение поверхностного коэффициента отражения в промежуточных точках и строится форма трехмерного объекта.
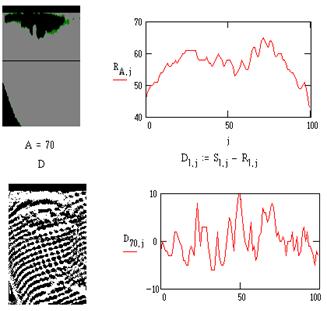
Рис. 7.4. Оцифрованные изображения человеческого лица и их яркостные срезы
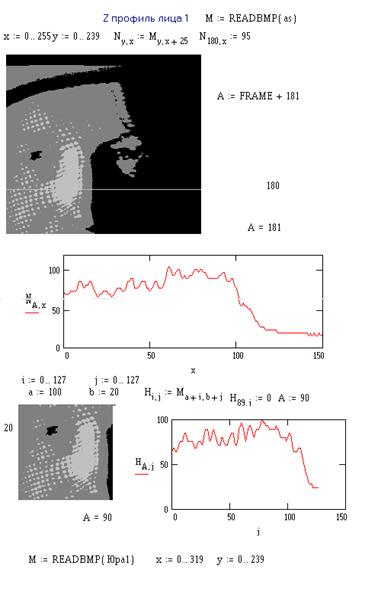
Рис. 7.5. Предварительное препарирование изображения лица человека
Применение данного метода к решению задачи контроля профиля гребня железнодорожного колеса, изображённого на рис. 7.9, как наиболее изнашивающегося трибообъекта подвижного состава повысит безопасность его эксплуатации в связи с увеличением площади контроля. В математической модели представленного метода индикатриса отражения от участка поверхности представляется в виде произведения индикатрис излучения источника и ламбертового отражателя.
Если ![]() – индикатриса излучения источника, а
– индикатриса излучения источника, а ![]() – индикатриса ламбертового отражателя, то уравнение локального к триангуляционному зонду участка поверхности в проекции на плоскость XOZ (рис. 7.10) будет выглядеть рис. 7.9, 7.10:
– индикатриса ламбертового отражателя, то уравнение локального к триангуляционному зонду участка поверхности в проекции на плоскость XOZ (рис. 7.10) будет выглядеть рис. 7.9, 7.10:
где ![]() – угол между вертикалью (осью OZ) и осью объектива;
– угол между вертикалью (осью OZ) и осью объектива;
Рис. 7.6. Предварительное сглаживание изображения лица человека
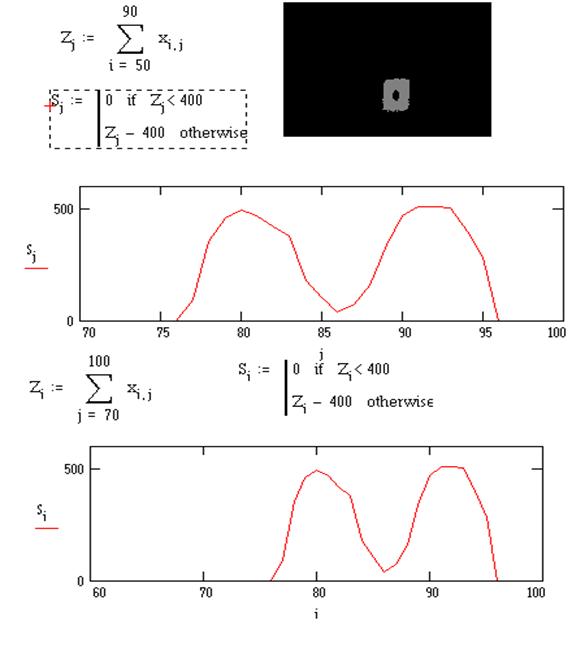
Рис. 7.7. Операции по обработке сигналов

Рис. 7.8. Определение пространственных координат отклика зонда
|
|
Рис. 7.9. Восстановленный участок поверхности колеса железнодорожного локомотива | Рис. 7.10. Формирование индикатрисы отражения |

![]() – полярный угол – аргумент индикатрис излучателя и участка поверхности объекта;
– полярный угол – аргумент индикатрис излучателя и участка поверхности объекта;![]() – начальный угол индикатрисы переотраженного излучения, попадающего в объектив камеры, с учетом наклона участка поверхности;
– начальный угол индикатрисы переотраженного излучения, попадающего в объектив камеры, с учетом наклона участка поверхности;
![]() – распределение интенсивности в плоскости изображения объектива камеры;
– распределение интенсивности в плоскости изображения объектива камеры;
![]() – апертура объектива камеры с допуском на ее независимость от расстояния до поверхности объекта.
– апертура объектива камеры с допуском на ее независимость от расстояния до поверхности объекта.
Перепишем с упрощениями распределение интенсивности в плоскости изображения камеры перепишется в виде
 .
.
есь ![]() – некоторая постоянная. Для рассматриваемого сочетания критерий прямой пропорциональности
– некоторая постоянная. Для рассматриваемого сочетания критерий прямой пропорциональности ![]() достигается путем уменьшения угла раствора индикатрисы излучения источника. При определенном угле
достигается путем уменьшения угла раствора индикатрисы излучения источника. При определенном угле ![]() распределение интенсивности в плоскости изображения камеры будет с точностью до линейного преобразования повторять форму участка поверхности. Поэтому, исходя из соображения формирования индикатрисы отражения с углом раствора не более 20°, индикатрису излучения источника можно представить в виде
распределение интенсивности в плоскости изображения камеры будет с точностью до линейного преобразования повторять форму участка поверхности. Поэтому, исходя из соображения формирования индикатрисы отражения с углом раствора не более 20°, индикатрису излучения источника можно представить в виде
 , где степень
, где степень  .
.
Моделирование процессов получения описаний и восстановления формы поверхности с гармонической структурой ![]() (a и b – параметры, p – пространственная частота, pb = const) приводит к оптимальному диапазону угла αÎ[72°;74°], о чём свидетельствует зависимость на рис.7.11.
(a и b – параметры, p – пространственная частота, pb = const) приводит к оптимальному диапазону угла αÎ[72°;74°], о чём свидетельствует зависимость на рис.7.11.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
