

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Суммарное ухудшение разрешающей способности телевизионных камер в охранных телевизионных системах может уменьшаться по сравнению с расчетным до 2-х раз днем до 3 - 5 раз и более, ночью.
Оцифровка сигналов в камерах имеет свои особенности.
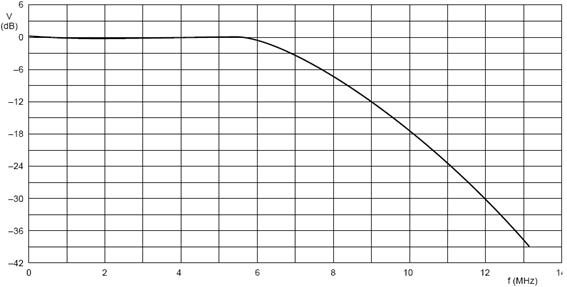
Рис. 9.19. Распространенная частотная характеристика канала для аналогового телевизионного сигнала

Рис. 9.20. Модуляция аналогового сигнала в камере с добавкой синхросигналов (наиболее распространенный аналоговый сигнал с цветных камер наблюдения)
Обработка сигналов с ССД приемников имеет свою специфику. Например, формат BT656 предполагает наличие сложного суммарного аналогового сигнала с встроенными синхроимпульсами (рис. 9.20). Она производится по схеме указанной на рис.9.21 различными АЦП и модулями в том числе и специализированными платами (рис. 9.22).
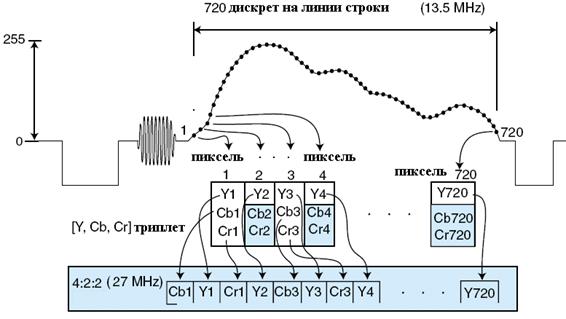
Рис. 9.21. Демодуляция АЦП в последовательность цветоразностных сигналов

Рис. 9.22. Фреймграббер фирмы Circuitcellar
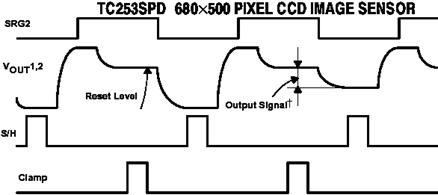
Рис.9.23. Сигналы с CCD TC253SPD
Сложность оцифровки не исчерпывает всей специфики обработки сигналов с матриц. На рис. 9.23. показаны реальные выходные сигналы с матрицы CCD. Необходимо учитывать и уровень сигнала сброса. В реальных входных усилителях проводится двойная коррелированная выборка, при которой выходной сигнал снимается относительно сигнала сброса. Синхронизация входного каскада осуществляется с СБИС синхронизации матрицы.
10 Расчет энергетических характеристик сигналов
Геометрическая часть расчета.
Найдем отношение между яркостью точки L на поверхности объекта и освещенностью E соответствующей точки на изображении. Рассмотрим объектив с входным зрачком диаметром d на расстоянии f от плоскости изображения (рис. 10.1). Пусть площадка поверхности объекта имеет площадь ![]() , а соответствующая площадка изображения – площадь
, а соответствующая площадка изображения – площадь ![]() . Предположим, что луч, направленный от площадки объекта к центру объектива, образует угол
. Предположим, что луч, направленный от площадки объекта к центру объектива, образует угол ![]() с оптической осью, а угол между этим лучом и нормалью к площадке равен
с оптической осью, а угол между этим лучом и нормалью к площадке равен ![]() . Площадка находится на расстоянии - z от объектива вдоль оптической оси. (Знак минус появляется из-за того, что ось z в нашей системе координат направлена к плоскости изображения.)
. Площадка находится на расстоянии - z от объектива вдоль оптической оси. (Знак минус появляется из-за того, что ось z в нашей системе координат направлена к плоскости изображения.)

Рис. 10.1. Диффузионное отражение
 .
.
Это простейший вариант расчета части энергии пришедшей на чувствительную площадку приемника ![]() . Полученные цифры умножаются на коэффициент отражения поверхности и коэффициент пропускания оптической системы. Не обходимо помнить то, что энергетические расчеты целесообразно в подавляющем большинстве случаев применения приборов вести с точностями 1…10%. Освещенность плоскости изображения пропорциональна яркости точки на объекте. Коэффициент пропорциональности в этой формуле содержит квадрат относительного отверстия d/f, а также множитель, убывающий как четвертая степень косинуса угла, образованного лучом, который направлен из точки изображения к центру линзы, и оптической осью (
. Полученные цифры умножаются на коэффициент отражения поверхности и коэффициент пропускания оптической системы. Не обходимо помнить то, что энергетические расчеты целесообразно в подавляющем большинстве случаев применения приборов вести с точностями 1…10%. Освещенность плоскости изображения пропорциональна яркости точки на объекте. Коэффициент пропорциональности в этой формуле содержит квадрат относительного отверстия d/f, а также множитель, убывающий как четвертая степень косинуса угла, образованного лучом, который направлен из точки изображения к центру линзы, и оптической осью (![]() ~ 0Это падение чувствительности не очень существенно, когда изображение располагается в пределах узкого угла, как в случае с телескопическими объективами. Более того, в типичных оптических системах диафрагмы, расположенные вдоль оптической оси, отсекают часть света для наклонных лучей. Итак, мы определили яркость сцены так, чтобы она соответствовала интуитивному понятию яркости, которая, в конечном счете, связана с освещенностью плоскости изображения.
~ 0Это падение чувствительности не очень существенно, когда изображение располагается в пределах узкого угла, как в случае с телескопическими объективами. Более того, в типичных оптических системах диафрагмы, расположенные вдоль оптической оси, отсекают часть света для наклонных лучей. Итак, мы определили яркость сцены так, чтобы она соответствовала интуитивному понятию яркости, которая, в конечном счете, связана с освещенностью плоскости изображения.
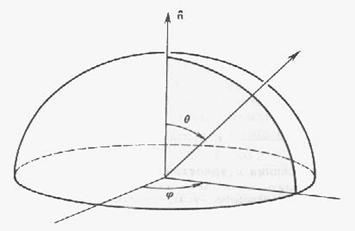
Рис. 10.2. Индикатриса диффузионного отражения
В более точных расчетах яркость сцены зависит от величины света падающего на поверхность, от доли отражаемых падающих лучей, а также от геометрических условий отражения света, как ясно показывает пример зеркала. То есть яркость поверхности в общем случае зависит от направлении, под которым она наблюдается, и от направления, в котором она освещается. Можно описать эти направления в локальной системе координат на поверхности объекта (рис. 10.6).Рассмотрим нормаль n к поверхности и произвольную линию на ней. ![]()
Направления можно описать с помощью углов ![]()
![]() между лучом и нормалью и
между лучом и нормалью и ![]() между ортогональной проекцией луча на поверхность и линией на поверхности.
между ортогональной проекцией луча на поверхность и линией на поверхности.![]()
Эти углы называются полярным и азимутальным соответственно.
Они позволяют нам определить направления  и
и  , под которыми свет падает на поверхность и излучается к наблюдателю (рис. 10.2).
, под которыми свет падает на поверхность и излучается к наблюдателю (рис. 10.2).
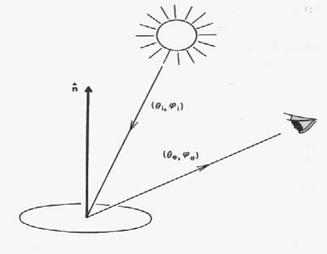
Рис. 10.3. Диффузионное отражение
Теперь можно определить двухлучевую функцию отражательной способности (ДФОС), которая показывает, насколько яркой кажется поверхность при заданных направлениях наблюдения и освещения. Пусть количество света, падающего на поверхность по направлению  ,— освещенность поверхности,— будет
,— освещенность поверхности,— будет  . Пусть яркость поверхности, наблюдаемая в направлении
. Пусть яркость поверхности, наблюдаемая в направлении ![]() , будет
, будет ![]() . ДФОС — это просто отношение яркости поверхности к ее освещенности:
. ДФОС — это просто отношение яркости поверхности к ее освещенности:
 |
Для многих поверхностей их яркость не меняется при повороте поверхности вокруг нормали. В этом случае ДФОС зависит не от ![]() и
и ![]() по отдельности, а от их разности
по отдельности, а от их разности![]() -
- ![]() . Это, в частности, верно для матовых и зеркально отражающих поверхностей, но не верно для поверхностей с ориентированной микроструктурой, например для минерала, называемого тигровый глаз, или радужных перьев некоторых птиц.
. Это, в частности, верно для матовых и зеркально отражающих поверхностей, но не верно для поверхностей с ориентированной микроструктурой, например для минерала, называемого тигровый глаз, или радужных перьев некоторых птиц.
Имеется одно интересное ограничение на вид ДФОС. Если две поверхности находятся в тепловом равновесии, то излучение, приходящее на одну поверхность от другой, должно уравновешиваться излучением в обратном направлении. Если бы этого не было, то одна поверхность нагревалась бы, а другая остывала и равновесие нарушилось бы. Это противоречило бы второму закону термодинамики.
В реальном случае могут существовать несколько точечных или даже протяженных источников, как например, небо. В случае протяженного источника, чтобы получить ненулевое излучение поверхности, мы должны рассматривать ненулевой телесный угол. Рассмотрим бесконечно малую площадку неба размером ![]() по полярному и
по полярному и ![]() по азимутальному углам рис. 10.1.
по азимутальному углам рис. 10.1.
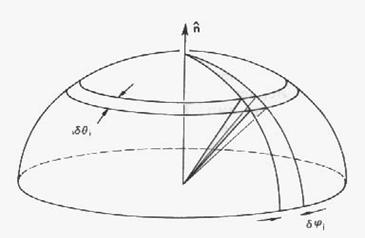
Рис. 10.4. Диффузионное отражение
Эта площадка задает телесный угол  . Если положить, что мощность излучения, приходящего по направлению на единицу телесного угла, равняется
. Если положить, что мощность излучения, приходящего по направлению на единицу телесного угла, равняется ![]() то мощность, идущая от рассматриваемой площадки, будет равняться выражению
то мощность, идущая от рассматриваемой площадки, будет равняться выражению ![]() , а полная освещенность поверхности — выражению
, а полная освещенность поверхности — выражению

Для получения яркости поверхности объекта необходимо проинтегрировать произведение ДФОС и освещенности по полусфере возможных направлений падения света. Таким образом:
 Идеальной ламбертовой поверхностью называется такая поверхность, кажущаяся яркость которой одинакова при любых направлениях наблюдения и которая отражает все падающие лучи, ничего не поглощая. Из этого определения следует, что ДФОС
Идеальной ламбертовой поверхностью называется такая поверхность, кажущаяся яркость которой одинакова при любых направлениях наблюдения и которая отражает все падающие лучи, ничего не поглощая. Из этого определения следует, что ДФОС  для такой поверхности должна быть константой. Чтобы определить ее, проинтегрируем яркость поверхности объекта по всем направлениям и приравняем полученную таким образом полную яркость полной освещенности
для такой поверхности должна быть константой. Чтобы определить ее, проинтегрируем яркость поверхности объекта по всем направлениям и приравняем полученную таким образом полную яркость полной освещенности
 или
или
Используя соотношение 2sin![]() cos
cos![]() = sin2
= sin2![]() , получим
, получим ![]() . Итак, для идеальной ламбертовой поверхности
. Итак, для идеальной ламбертовой поверхности . Заметим, что, поскольку ДФОС постоянна для ламбертовой поверхности, мы можем вычислить яркость L по освещенности
. Заметим, что, поскольку ДФОС постоянна для ламбертовой поверхности, мы можем вычислить яркость L по освещенности ![]() т. е.
т. е. ![]() . Этот простой метод, конечно, нельзя применить к поверхности с другими отражательными свойствами. ДФОС можно определить экспериментально, освещая плоский образец интересующего нас материала лампой, установленной на гониометре, и измеряя его яркость с помощью сенсора, установленного на другом гониометре, (Гониометр имеет две оси вращения, поэтому установленный на нем прибор можно точно выставить по направлению.) Экспериментальное определение ДФОС очень утомительно, так как определяется зависимость от четырех переменных. К счастью, обычно значимыми являются только три из них:
. Этот простой метод, конечно, нельзя применить к поверхности с другими отражательными свойствами. ДФОС можно определить экспериментально, освещая плоский образец интересующего нас материала лампой, установленной на гониометре, и измеряя его яркость с помощью сенсора, установленного на другом гониометре, (Гониометр имеет две оси вращения, поэтому установленный на нем прибор можно точно выставить по направлению.) Экспериментальное определение ДФОС очень утомительно, так как определяется зависимость от четырех переменных. К счастью, обычно значимыми являются только три из них: ![]() ,
,![]() и
и ![]() . Другой способ получения ДФОС заключается в построении модели отражения света от поверхности и в нахождении соответствующих отражательных свойств аналитически или численным моделированием.
. Другой способ получения ДФОС заключается в построении модели отражения света от поверхности и в нахождении соответствующих отражательных свойств аналитически или численным моделированием.
Ориентация поверхности
Функция ДФОС имеет фундаментальное значение при изучении отражения от поверхности. Однако это не совсем то, что нужно, при изучении формирования изображения. Прежде всего, чтобы свести воедино распределение источников света, мы должны проинтегрировать ДФОС по всем возможным направлениям падения света. Это дает нам функцию, зависящую только от двух параметров. Мы можем связать эти два параметра с ориентацией, очень важной характеристикой изображаемой поверхности. Однако чтобы успешно проделать это необходимо отказаться от локальной координатной системы, используемой при определении ДФОС, и использовать вместо нее систему координат, связанную с наблюдателем.
Выберем систем так, чтобы одна из ее осей была направлена вдоль оптической оси системы формирующей изображение. Мы можем поместить начало координат в центр линзы, а две оси будут параллельны плоскости изображения. Чтобы оси составляли правую тройку, направим ось z на изображение.
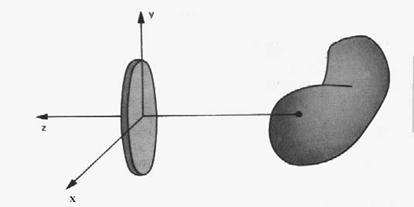
Рис. 10.5. Диффузионное отражение
Теперь фрагмент поверхности можно описать ее перпендикулярным расстоянием - z от плоскости линзы (или некоторой параллельной ей условной плоскости). Это расстояние будет зависеть от бокового смещения (х, у) . Следующее, что нам хотелось бы сделать, - это выписать нормаль к поверхности в зависимости от z и частных производных по x и у.
Нормаль к поверхности перпендикулярна всем линиям на касательной плоскости. Следовательно, ее можно найти в виде векторного произведения любых двух (непараллельных) прямых на касательной плоскости. Предположим, мы берем небольшое приращение ![]() в направлении x из данной точки (х, у). Изменение z можно найти с помощью разложения в ряд Тейлора в виде
в направлении x из данной точки (х, у). Изменение z можно найти с помощью разложения в ряд Тейлора в виде  , где e содержит члены более высоких порядков. Для первых частных производных z по х и у используем обозначения p и q соответственно. Таким образом, р- это наклон поверхности в направлении х, а q - в направлении у. Вектор (р, q) довольно удачно назван градиентом поверхности, поскольку его компоненты р и q характеризуют наклон поверхности в направлениях x и у соответственно.
, где e содержит члены более высоких порядков. Для первых частных производных z по х и у используем обозначения p и q соответственно. Таким образом, р- это наклон поверхности в направлении х, а q - в направлении у. Вектор (р, q) довольно удачно назван градиентом поверхности, поскольку его компоненты р и q характеризуют наклон поверхности в направлениях x и у соответственно.
Единичный вектор нормали к поверхности описывается выражением
Мы можем непосредственно вычислить угол ![]() между нормалью к поверхности и направлением на линзу при условии, что для рассматриваемой точки расстояние до оптической оси мало по сравнению с расстоянием до координатной плоскости. В этом случае единичный вектор в направлении от объекта к линзе имеет вид
между нормалью к поверхности и направлением на линзу при условии, что для рассматриваемой точки расстояние до оптической оси мало по сравнению с расстоянием до координатной плоскости. В этом случае единичный вектор в направлении от объекта к линзе имеет вид ![]() , a
, a ![]() . Это можно получить, вычислив скалярное произведение двух единичных векторов.
. Это можно получить, вычислив скалярное произведение двух единичных векторов.
Как определить положение источников света? Полагая источники удаленными от объекта на расстояние, большее по сравнению с характерным размером объекта, можно определить направление на каждый источник постоянным вектором. Существует ориентация поверхности, соответствующая этому вектору, т. е. поверхность, ориентированная перпендикулярно лучам, приходящим от источника. Если нормаль к этой поверхности имеет координаты ![]() то градиент
то градиент ![]() можно использовать для определения направления на источник (если он расположен по ту же сторону объекта, что и наблюдатель).
можно использовать для определения направления на источник (если он расположен по ту же сторону объекта, что и наблюдатель).
Карта отражательной способности.
Она обеспечивает явную связь между ориентацией поверхности и ee яркостью. В ней содержится информации об отражательных свойствах поверхности и распределении источников света. Данное наглядное средство используется для разработки методов восстановления формы поверхности по изображению.
Рассмотрим источник с яркостью Е, освещающий ламбертову поверхность. Яркость сцены составляет L= для
для ![]() , где
, где ![]() — угол между нормалью к поверхности и направлением на источник. Вычислив скалярное произведение соответствующих единичных векторов, получим:
— угол между нормалью к поверхности и направлением на источник. Вычислив скалярное произведение соответствующих единичных векторов, получим:
 „
„
Это дает нам хорошее представление о том, как яркость зависит от ориентации поверхности. Этот результат называется картой отражательной способности и обозначается через R(р, q). Она зависит от свойств материала поверхности объекта и распределения источников света.
Для ламбертовой поверхности, освещенной единственным удаленным источником, имеем
R(р, q) =
Таким образом, с точностью до постоянного масштабного множителя
карта отражательной способности дает зависимость яркости сцены от ориентации поверхности.
Карта отражательной способности включает в себя зависимость яркости от ориентации поверхности. В данной точке изображения мы измеряем освещенность Е(х, у). Она пропорциональна яркости соответствующей точки изображаемой поверхности, определяемой из уравнения проектирования. Если градиент поверхности в этой точке равен (p, q), то яркость равна R(p, q). Если мы нормализуем эту функцию так, чтобы коэффициент пропорциональности равнялся единице, то получим E(x, y)=R(p, q). Это уравнение освещенности изображения является фундаментальным для методов восстановления формы поверхности. Рассмотрим сферу с ламбертовой поверхностью, освещенную точечным источником, который находится рядом с наблюдателем (рис. 10.6).
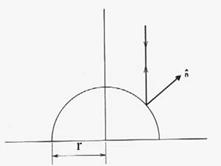 |
Рис. 10.6. Диффузионное отражение
В этом случае ![]() =
=![]() и
и ![]() = (0,0), поэтому R(р, q) =
= (0,0), поэтому R(р, q) =
В конечном итоге имеем E(x, y)=R(p, q)=  .
.
Яркость гладко спадает от максимума в центре изображения к нулю по краям. Именно это изменение яркости позволяет нам заключить, что это изображение круглого, возможно сферического, объекта. Если сфера имеет поверхность с другими отражательными свойствами, она даст другое изображение.
Спектральное согласование позволяет учесть распределение энергетических характеристик вех компонентов системы по длинам волн. Графики позволяют получить интегральные цифры ожидаемых величин (рис. 10.7, 10.9).
Максимальную чувствительность приемник SFH 3410 имеет на 570 нм (фототок 40 мка, при 100 lx, 5 v). Кроме того приобретают популярность интегральные графики, позволяющие оценить эффективность применения различных приемников (рис. 10.8).
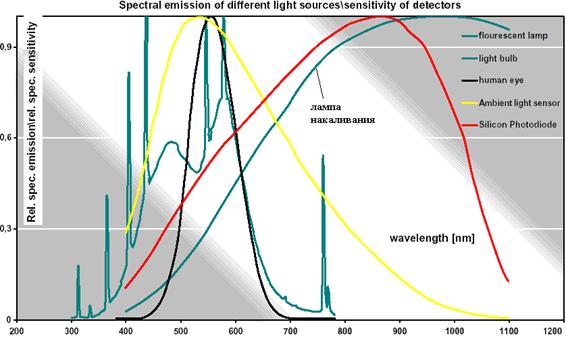
Рис.10.7. Спектры испускания энергии для различных источников излучения чувствительность глаза человека, кремниевого фотоприемника и фотоприемника типа SFH 3410
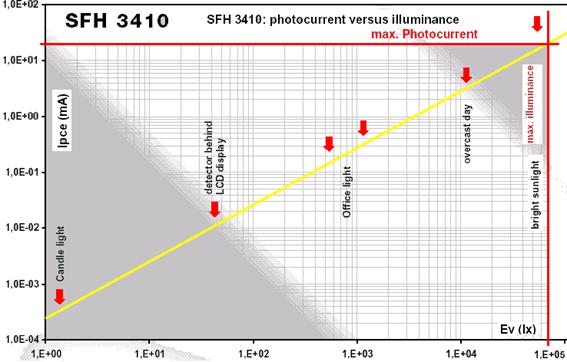
Рис.10.8. Токи с фотоприемника для различных случаев применения
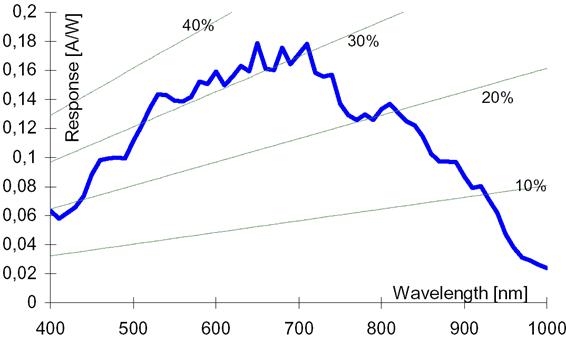
Рис.10.9. Спектральные характеристики приемников матрица FUGA 1000
Более детально сориентироваться в применении различных приемников можно по комплексу характеристик, обычно прилагаемых к прибору, например, рис.10.11.
Для различных типов светофильтров также существуют графики пропускания (рис.10.10)/
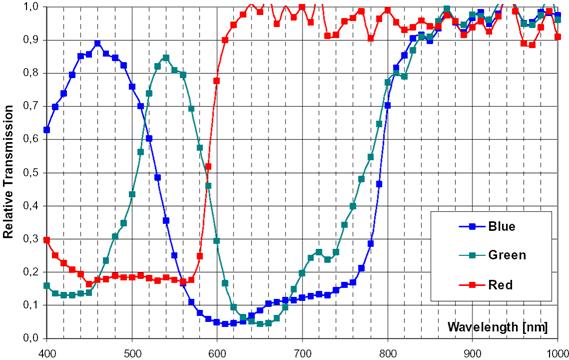
Рис.10.10. Пропускание различных типов фильтров
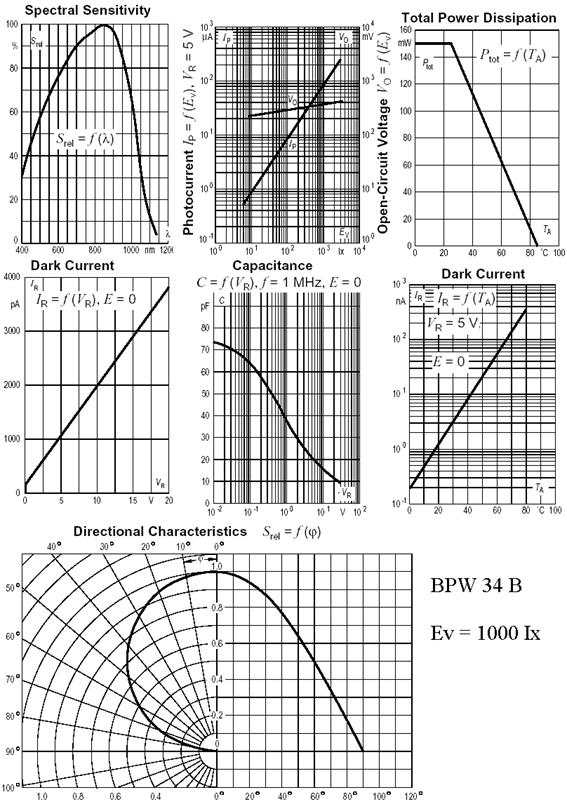
Рис. Характеристики приемника BPW 34 B
Спектральное согласование в комплексном варианте предполагает добавление к естественным источникам света искусственных, учет комбинаций естественных источников света. При этом решается задача определения эффективности выбранного фотоприемника, осветителей, задача распознавания различных объектов. Рассмотрим ее решение на примере построения прибора ночного видения.
Естественные источники света.
Для пассивных приборов ночного видения (ПНВ) Солнце является наиболее часто используемым первичным источником излучения. Его излучение отражается Луной, облаками и направляется на поверхность Земли. Спектр излучения Солнца близок к спектру абсолютно черного тела (АЧТ) с температурой ~ 6000 К. После отражения от Луны, облаков он изменяется и для ПНВ более подходит модель осветителя, как АЧТ 5600 … 5900 К. Построим распределение энергии по спектру (рис.10.12).
Поглощение в атмосфере Земли, отражение от верхних слоев атмосферы, Луны, планет изменяет вид спектра излучения. В спектре относительно увеличиваются энергия более длинноволновых составляющих, появляется изрезанность. На рис. 10.13 и рис.10.14. показан вид спектра излучения составляющих.
Графики взяты с усреднением, по ним сформированы файлы данных и описание итогового светового сигнала. На рис. 10.15. показаны, приведенные к единому диапазону длин волн, спектры излучения, занесенные в файлы данных.
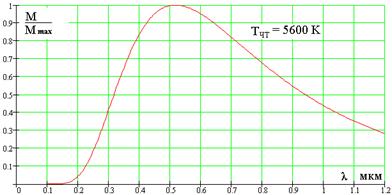
Рис. 10.12. Спектр излучения черного тела с температурой 5600 К
Рис. 10.13. Кривая спектра излучения небесного свода в ночное время
Рис. Кривые спектров излучения 1─"лунного света", 2 ─ "звездного света" в ночное время
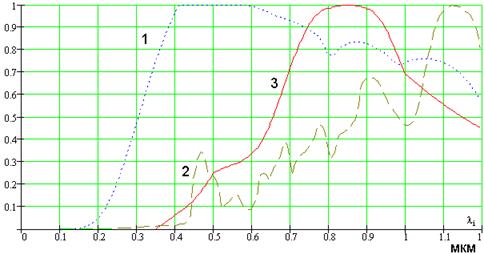
Рис.10.15. Приведенные к максимуму кривые спектров излучения 1─"лунного света", 2 ─ "звездного света", 3 - небесного свода в ночное время
Искусственные источники света.
Спектр искусственных источников оптического излучения можно, как правило, описать аналитически. На рис. 10.16 и рис. 10.17 приведены примеры аналитических выражений, которые можно использовать для описания лазерных, светодиодных осветителей.
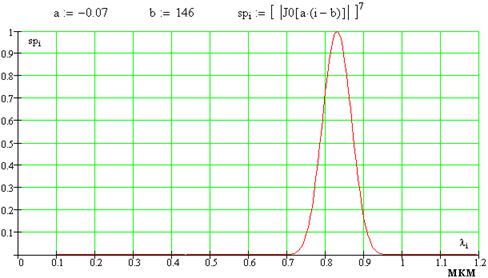
Рис. 10.16. Использование функций Бесселя для описания спектра источников излучения
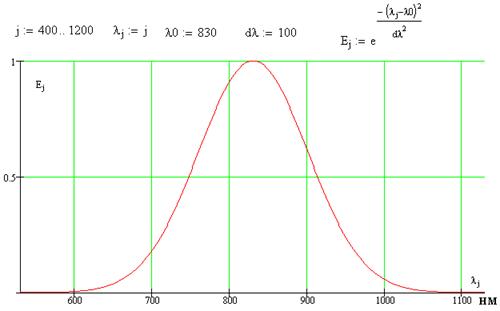
Рис. 10.17. Использование показательных функций для описания спектра источников излучения
Итоговый спектр излучения падающего на объект наблюдения.
Обработка графиков, массивов данных, использование аналитических зависимостей позволяют построить итоговый профиль спектра излучения (рис. 10.18 и рис. 10.19). Файлы данных, использованные при расчетах именованы: имя файла = s - индекс спектра; первое число - коэффициент вклада небесного свода; второе - лунного света; третье - звездного света; четвертое – прожектора. Нуль впереди числа указывает на дробь. Например: s2_1_05_06.dat – коэффициенты суммирования – 2, 1, 0.5, 0.6).
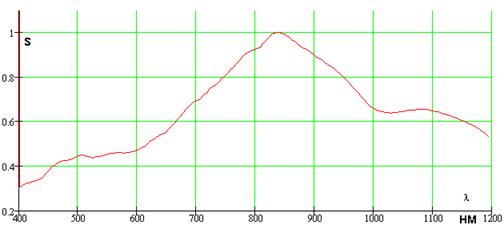
Рис. 10.18. Спектр излучения со слагаемыми – 2, 1, 0.5, 0.6
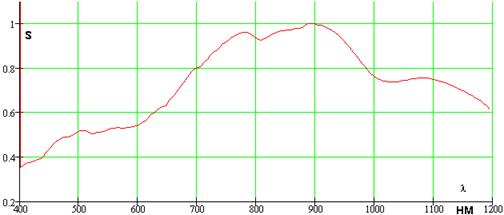
Рис. 10.19. Спектр излучения со слагаемыми – 2, 1, 0.5, 0
Итоговый профиль спектра получается путем сложения компонентов с коэффициентами заданными по энергии. На рис. 10.20 приведен пример изменения итогового спектра при задании коэффициентов сложения по линиям спектра и по энергии (файлы : s2_1_05_06.dat - кривая 1 и se2_1_05_06.dat - кривая 2).
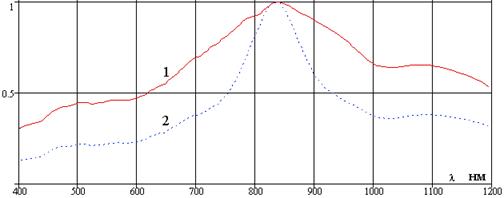
Рис.10.20. Спектры излучения со слагаемыми – 2, 1, 0.5, 0.6. 1 – слагаемые заданы по линии спектра, 2 – слагаемые заданы по энергии
Исходя из данных по ситуации, в которой будут применяться приборы, выбирается программа подготовки спектра.
Отражение излучения от объектов.
При отражении от объекта спектр излучения изменяется. Изменение коэффициента отражения в плоскости предметов и позволяет различать объекты и ориентироваться. Сформируем рабочие файлы коэффициентов отражения по графическим данным. На рис.приведен вид коэффициентов отражения различных объектов
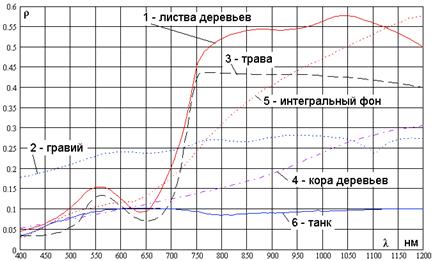
Рис. 10.21. Коэффициенты отражения различных объектов
Фотоприемники. В настоящее время известно несколько групп полупроводниковых материалов предназначенных для преобразования оптического излучения в электрический сигнал.
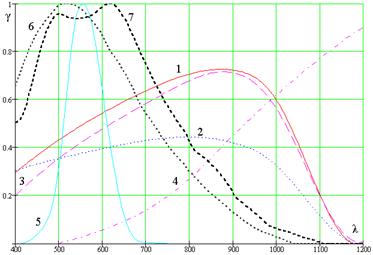
Рис. 10.22. Относительная спектральная чувствительность приемников:
1 - pin - фотодиода; 2 - МОП; 3 - кремниевого; 4 - InGaAs; 5 - глаз человека днем;
6 - ICX 409AL; 7 - ICX 249AL.
В сочетании с характеристиками, описывающими шумы прибора, она определяет способность фотоприемника “видеть объекты”. Но в подавляющем большинстве случаев в документации на фотоприемник приводится величина чувствительности в вольтах или амперах на люкс, изготовители как бы сравнивают данный приемник с глазом человека. Данная характеристика дается в виде графика.
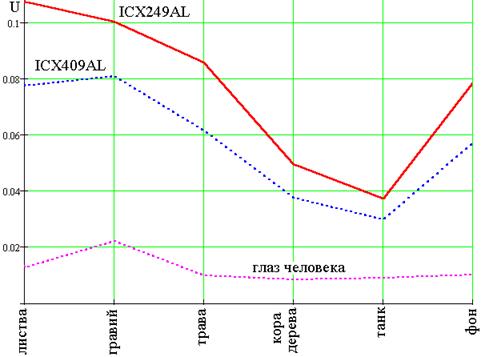
Рис. 10.23. Возможность различия объектов по интегральному излучению фотоприемниками ICX409AL, ICX249AL и глазом человека. Излучатель “s2_1_05_06.dat”
По графикам, взятым из электронных документов или отсканированным сформирован массив данных. Первая строка включает в себя значения длин волн в нм, для которых вычислены параметры чувствительности в последующих строках. В данном случае применена линейная шкала с шагом в 5 нм в диапазоне 400 … 1200 нм. Массив легко дополняется новыми строками и входит в перечень файлов данных пакета оценки параметров сигналов ПНВ. На рис. 10.22 приведены графики, отображающие семь строк данного файла.
На рис. 10.23, 10.24 приведены результаты расчетов при различном виде спектра источника излучения (рис. 10.18). Как видно из графиков, ход кривых существенно зависит от спектра источника излучения. Кроме того, различие в сигналах с ICX249AL, кривая чувствительности которого расширена в область больших длин волн выше, чем у ICX409AL. Данные по ICX409AL и ICX249AL показывают выигрыш последних по интегральной чувствительности в 6,5 раз (min – 680 и 4500 mv; typ – 850 и 5500 mv при близких условиях измерения).
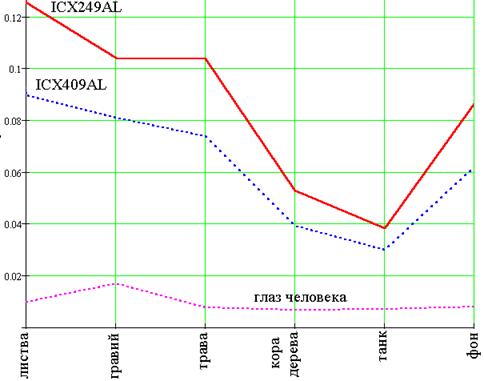
Рис. 10.24. Возможность различия объектов по интегральному излучению фотоприемниками ICX409AL, ICX249AL и глазом человека. Излучатель “se2_1_05_06.dat”
Таким образом, можно определить основные этапы проведения спектрального согласования компонентов оптической цепи прибора:
1. Вычисляем зависимость энергии излучения источника освещения от длины волны (Это может быть слагаемый источник, компоненты которого подбираются).
2. Определяем характеристики отражения (пропускания) распознаваемых объектов и фона.
3. Выбираем и вводим в расчеты кривые чувствительности фотоприемников.
4. Вычисляем интегралы по длине волны от произведения характеристик каждого сочетания компонентов, определяя сигналы.
11. Помехи в системах формирования изображений
Шумы
Шумом называют любой источник неопределенности сигнала. Можно выделить следующие типы шумов CCD.
Фотонный шум. Является следствием дискретной природы света. Любой дискретный процесс подчиняется закону (статистике) Пуассона. Поток фотонов (S. количество фотонов, падающих на светочувствительную часть приемника за единицу времени) так же следует той статистике. Согласно ей, фотонный шум пропорционален ![]() . Таким образом, отношение сигнал/шум (обозначается как S/N. signal/noise ratio) для входного сигнала будет пропорционален
. Таким образом, отношение сигнал/шум (обозначается как S/N. signal/noise ratio) для входного сигнала будет пропорционален![]() .
.
Шум темнового сигнала. Если на вход матрицы не подавать световой сигнал (например,
плотно закрыть светонепроницаемой крышкой объектив видеокамеры), то на выходе сис-
темы получим так называемые «темновые» кадры, по-другому его называют шум-снежок.
Основной составляющей темнового сигнала является термоэлектронная эмиссия. Чем ниже температура, тем ниже и темновой сигнал. Термоэлектронная эмиссия также подчиняется статистике Пуассона и её шум равен: t N, где Nt. число термически сгенерированных электронов в общем сигнале. Как правило, во всех используемых в системах охранного телевидения видеокамерах CCD применяются без активного охлаждения, вследствие чего темновой шум оказывается одним из основных источников шума.
Шум переноса. Во время переноса зарядового пакета по элементам CCD некоторая часть
электронов теряется. Она захватывается на дефектах и примесях, существующих в кристалле. Эта неэффективность переноса случайным образом меняется как функция количества переносимых зарядов (N), числа переносов (n) и неэффективности отдельного акта переноса (). Если предположить, что каждый пакет переносится независимо, то шум переноса можно представить следующим выражением: = (2nN ) .
Пример: для неэффективности переноса 10-5 , 300 переносов и числа электронов в пакете
105, шум переноса составит 25 электронов.
Шум считывания. Когда сигнал, накопленный в элементе CCD, выводится из матрицы,
преобразуется в напряжение и усиливается, в каждом элементе появляется дополнительный шум, называемый шумом считывания. Шум считывания можно представить как некоторый базовый уровень шума, который присутствует даже в изображении с нулевым уровнем экспозиции, когда матрица находится в полной темноте и шум темнового сигнала равен нулю.
Типичный шум считывания для хороших образцов CCD составляет 15-20 электронов. В
лучших образцах CCD, изготавливаемых корпорацией Ford Aerospace по технологии
Skipper, достигнут шум считывания менее 1 электрона и неэффективность переноса составляет 10-6.
Шум сброса или kTC-шум. Перед вводом в детектирующий узел сигнального заряда необходимо вывести предыдущий заряд. Для этого используется транзистор сброса. Электрический уровень сброса зависит только от температуры и емкости детектирующего узла, что вносит шум: r= q (kTC ) , где k. постоянная Больцмана.
Для типичного значения ёмкости С равной 0.1пф при комнатной температуре шум сброса
составит около 130 электронов. kTC-шум может быть полностью подавлен специальным
методом обработки сигнала: двойной коррелированной выборкой (ДКВ). Метод ДКВ эффективно устраняет и низкочастотные сигналы, вносимые обычно цепями питания.
Поскольку основная нагрузка на системы охранного телевидения приходится на темное
время суток (либо плохо освещенные помещения), то особенно важно уделять внимание
низкошумящим видеокамерам, имеющим большую эффективность применения в условиях низкого освещения.
Параметр, описывающий относительную величину шума, как было сказано выше, называется отношением сигнал/шум (S/N) и измеряется в децибелах.
S/N =20 х log(<видеосигнал>/<шум>)
Например, сигнал/шум, равный 60 дБ, означает, что сигнал в 1000 раз больше шума.
При соотношении сигнал/шум 50 дБ и более на мониторе будет видна чистая картинка без видимых признаков шума, при 40 дБ. иногда заметны мелькающие точки, при 30 дБ.
«снег» по всему экрану, при 20 дБ. изображение практически неприемлемо, хотя крупные контрастные объекты через сплошную «снежную» пелену разглядеть еще можно.
В данных, приводимых в описаниях камер, указываются значения сигнал/шум для опти-
мальных условий, например, при освещенности на матрице 10 люкс и при выключенной
автоматической регулировке усиления и гамма-коррекции. По мере уменьшения освещенности сигнал становится меньше, а шум, вследствие действия АРУ и гамма-коррекции, больше.
12. Информационные потоки в системах формирования изображений
Информационная ёмкость фотографической системы оценивается максимальным числом различным состояний (изображений), которое может обеспечить данная система. В простейшем случае информационная ёмкость (I) определяется по формуле: I = n × log2m, где: n — предельно разрешаемое число элементов на единице площади изображения, m — количество передаваемых градаций яркости (полутонов) в изображении. Информационная ёмкость выражается в количестве битов на квадратный миллиметр. Для оценки качества изображения, создаваемого плёночным фотоаппаратом, применяется более сложная формула информационной ёмкости, позволяющая учитывать специфику фотографируемого сюжета и представляющая собой интегральную функцию пространственной частоты, коэффициент контрастности фотоматериала, частотно-контрастную характеристику фотосистемы, спектра гранулярности фотоматериала и пространственно-частотного спектра сюжета съёмки.
С поправками, указанные зависимости используются и для определения информационной ёмкости изображений, получаемых цифровой фототехникой.
Для количественной оценки числа элементов, разрешаемых на площади кадра (n), используются специальные двухмерные миры абсолютного контраста, такие как разработанная в 1969 году д. т.н. треугольная мира, элементы которой имеют форму равносторонних треугольников с периодом в две высоты треугольников. Кроме указанной, существуют и другие тест-объекты, также, как правило, использующие в качестве элементов равносторонние треугольники или их сочетания.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
