

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 7.11. Зависимость коэффициента k от угла α
Коэффициент k характеризует модуль отклонения скважности q периодической во времени яркостной структуры, образующейся в плоскости изображения в процессе считывания, от значения 0,5 на срединном уровне. Пояснения даны на рис. 7.12.
Временные профили (а, б) яркостных сигналов в плоскости изображения камеры при различных углах α и трехмерный вид (в) восстановленной поверхности при α=72°
α=30° q=0,75 α=80° q=0,4 α=72° q=0,49
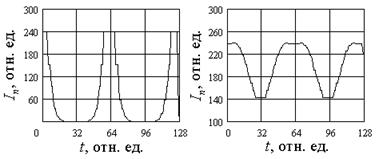

а б в
Рис. 7.12. Временные профили сигналов и 3D объект
Таким образом, установка камеры под оптимальным углом α к вертикали позволяет получить временной яркостный профиль, пропорциональный градиенту считываемой поверхности, и провести ее идентификацию по совокупности параметров, определяющих кусочно-гладкую аппроксимацию.
В сбалансированной схеме на рис. 7.13 предложен вариант встречного зондирования формированные системами излучения 1 и 2 зонды 3 и 4 в виде параллельных оси OZ полос направляются под некоторыми углами ![]() и
и ![]() к плоскости XOZ на объект 5.
к плоскости XOZ на объект 5.
Рис. 7.13. Сбалансированная схема оптической триангуляции
Изображения зондов – яркостные кривые на поверхности объекта считываются камерой 6 и поступают в ЭВМ для последующей обработки.
Точность вычисления координат точек на поверхности объекта зависит от множества факторов, в частности, от формы считываемой поверхности. Она априорно неизвестна, но может быть описана некоторой функцией трёх пространственных переменных: ![]() . В системе координат на рис. 7.14. уравнение одного из считывающих зондов-линий записывается следующим образом:
. В системе координат на рис. 7.14. уравнение одного из считывающих зондов-линий записывается следующим образом:
![]() , где β – это одно из значений
, где β – это одно из значений ![]() или
или ![]() ,
, ![]() .
.
Для расчёта погрешности, исследования функциональной зависимости чувствительности триангуляционных измерений к угловым смещениям объекта, а также влияния формы поверхности на вид получаемой функциональной кривой и оптимизации параметров сканированияэффективен критерий:
 ,
,
где ![]() - уравнение функциональной кривой – яркостной метки на поверхности объекта,
- уравнение функциональной кривой – яркостной метки на поверхности объекта,  - функция профиля поверхности объекта,
- функция профиля поверхности объекта, ![]() - координата пересечения профиля с осью OX. Исходя из этого выражения, в качестве погрешности измерений берётся относительное отклонение величины, характеризующей форму функциональной кривой, от соответствующей величины, характеризующей исследуемый профиль.
- координата пересечения профиля с осью OX. Исходя из этого выражения, в качестве погрешности измерений берётся относительное отклонение величины, характеризующей форму функциональной кривой, от соответствующей величины, характеризующей исследуемый профиль.
Поверхность объекта удобно аппроксимировать совокупностью участков трёхмерных элементов: плоскостей, параболоидов, сфер, цилиндров и т. д., которые, в свою очередь, делятся на сочетания примитивов (прямых, парабол, окружностей и т. д.) в плоскостях ZOX и ZOY. Простейшее сочетание прямая – прямая:


где g – это угол наклона второй компоненты сочетания к оси OY (![]() ), описывает участок плоскости. Изменение g эквивалентно повороту объекта вокруг оси OX. Пусть преобразование координат из (x’, y’, z’) в (x, y, z) записывается в виде:
), описывает участок плоскости. Изменение g эквивалентно повороту объекта вокруг оси OX. Пусть преобразование координат из (x’, y’, z’) в (x, y, z) записывается в виде:
Тогда,
 ,
,
и в результате простейшего случая получается функциональная кривая вида:

несущая информацию о профиле объекта. Условие  приводит к следующему тригонометрическому уравнению относительно g :
приводит к следующему тригонометрическому уравнению относительно g :
![]() ,
,
( ) решением, которого является предельное и практически недосягаемое значение угла
) решением, которого является предельное и практически недосягаемое значение угла ![]() . Очевиден тот факт, что уменьшение угла g и его стремление к
. Очевиден тот факт, что уменьшение угла g и его стремление к ![]() уменьшает погрешность триангуляционных измерений.
уменьшает погрешность триангуляционных измерений.
Рабочим принимается сочетание окружность – прямая, при котором, согласно рис. 7.14, отклик на зондирующую линию описывается эллипсом:
 где g – угол наклона прямой, имеющей общую точку с окружностью и зондирующей линией и расположенной в плоскости YOZ, к оси OY;
где g – угол наклона прямой, имеющей общую точку с окружностью и зондирующей линией и расположенной в плоскости YOZ, к оси OY; ![]() – радиус окружности, лежащей в плоскости, составляющей угол g с плоскостью XOZ, с центром в начале координат;
– радиус окружности, лежащей в плоскости, составляющей угол g с плоскостью XOZ, с центром в начале координат;
![]() – координата пересечения зондирующей линии c осью OY.
– координата пересечения зондирующей линии c осью OY.
Рис. 7.14. Сочетание окружность – прямая
При g = 0 его эксцентриситет 
который обращается в нуль только при ![]() , с точки зрения этого сочетания являющимся наилучшим углом считывания. Некоторые другие сочетания, например, прямая– окружность:
, с точки зрения этого сочетания являющимся наилучшим углом считывания. Некоторые другие сочетания, например, прямая– окружность: 
либо парабола – окружность приводят к выводу:
налагающему ограничения на исследуемый объект и угол ![]() . Для различных форм объектов погрешность
. Для различных форм объектов погрешность
представляет собой нормированное к единице разложение ![]() в ряд. Общая погрешность угловых смещений объекта относительно β:
в ряд. Общая погрешность угловых смещений объекта относительно β:

где ![]() – некоторый коэффициент (
– некоторый коэффициент (![]() ). На рис. 7.15 изображены зависимости
). На рис. 7.15 изображены зависимости ![]() при различных значениях параметра a.
при различных значениях параметра a.
Рис. 7.15. Зависимости ![]() при различных значениях параметра а
при различных значениях параметра а
Как показывают практические исследования, величина  является наиболее оптимальной и
является наиболее оптимальной и
 .
.
Погрешность для угла g  :
:
следует из квадратичной формы (4) (![]() ) после приведения её к каноническому виду. Оптимальный угол
) после приведения её к каноническому виду. Оптимальный угол ![]() , на который смещается источник излучения относительно объекта для снятия наибольшей информации об исследуемой части его поверхности (рис. 7.13), находится из условия:
, на который смещается источник излучения относительно объекта для снятия наибольшей информации об исследуемой части его поверхности (рис. 7.13), находится из условия:
![]() ,
,
Рис. 7.16. К расчёту оптимального угла ![]()
где  – проекция "видимой" кривой, которая образуется в сечении объекта плоскостью XOZ, на ось OZ,
– проекция "видимой" кривой, которая образуется в сечении объекта плоскостью XOZ, на ось OZ, ![]() - угол наклона касательной в точке с координатой
- угол наклона касательной в точке с координатой ![]() к оси OX.
к оси OX.
Преобразование ![]() приводит к результату:
приводит к результату: ![]()
При этом, 
и  .
.
Поиск общей погрешности триангуляционных измерений ![]() в виде:
в виде:
![]() ,с учётом граничных условий вида:
,с учётом граничных условий вида:
приводит к выводу:

С целью анализа чувствительности рассматриваемой триангуляционной схемы к угловым смещениям объекта вычисляются значения следующих производных в точке оптимального считывания (![]()
![]() ):
):
Выражение позволяет выявить основной недостаток рассматриваемой триангуляционной схемы при считывании динамических объектов. Таковым недостатком является высокая чувствительность измерений к поворотам объекта вокруг оси OX. Он избегается введением дополнительной схемы контроля в плоскость XOZ. С другой стороны, достоинством триангуляционного сканирования с использованием линейных зондов является практически нечувствительность схемы к поворотам объекта вокруг оси OY и малая чувствительность – к поворотам вокруг оси OZ.
Следует заметить, что функция (5) обращается в минимум при β = 0. Поэтому, для
упрощения расчётов вблизи этого значения погрешность ![]() будем вычислять по формуле:
будем вычислять по формуле:![]() .
.

Предел же
 .
.
Задача, связанная со смазом получаемого изображения, заключается в расчёте длительности импульса включения источников излучения. Пусть некоторый малый отрезок яркостной кривой z(y) с координатами его середины (y, z) отображается в виде ячейки с координатами (i, j) на CCD-матрице. Множество таких отрезков, образующих яркостную метку на объекте, за время накопления заряда отобразится в смазанную кривую на CCD-матрице. Это проиллюстрировано на рис. 7.17.
Рис. 7.17. Смазанный участок яркостной кривой
Процесс цифровой обработки полученного изображения сводится главным образом к построчному вычислению координат энергетических центров яркостных сигналов. Поэтому, в дальнейшем рассматривается изменение только координаты y произвольной точки (y, z) при движении объекта. За время накопления t’ её смещение

что на CCD-матрице приведёт к изменению координаты j на величину
где δy – линейный размер CCD-ячейки; M – увеличение системы (М<1).
После разложения подынтегральных функций ![]() и
и  в ряд Маклорена с точностью до t ( интеграл вычисляется с точностью до
в ряд Маклорена с точностью до t ( интеграл вычисляется с точностью до ![]() ):
):
 выражение (15) приводится к виду:
выражение (15) приводится к виду:

Во избежание смаза должно выполняться следующее условие:
![]() Тогда
Тогда
знак “+” в обоих случаях ставится тогда, когда  , а “–” при
, а “–” при  .
.
Таким образом, по известному закону движения материальной точки можно оценить требуемую длительность импульса включения источников излучения. В задаче контроля износа реборды железнодорожного колеса, движущегося равномерно со скоростью ![]() :
:
 ,
,
 ,
,
 ,
,
где R – радиус обода колеса. Подставляя эти выражения в формулу и пренебрегая, в виду малости, слагаемыми с ![]() , получим:
, получим:  .
.
При ![]() длительность излучаемого импульса t’<9 мс. Хотелось бы заметить, что скорость части обода, соприкасающейся с рельсом, близка к нулю, и для контроля износа реборды железнодорожного колеса в его нижней части полученное значение длительности вполне приемлемо, ибо время накопления существующих CCD-приёмников гораздо меньше 9 мс.
длительность излучаемого импульса t’<9 мс. Хотелось бы заметить, что скорость части обода, соприкасающейся с рельсом, близка к нулю, и для контроля износа реборды железнодорожного колеса в его нижней части полученное значение длительности вполне приемлемо, ибо время накопления существующих CCD-приёмников гораздо меньше 9 мс.
При считывании формы трёхмерных объектов в динамике основную роль играет скорость настройки системы на соседнюю локальную область поверхности, в частности, скорость автофокусировки её приёмной оптики. Кроме этого автофокусировка является операцией, в которой определяется Z - координата распознаваемого объекта т. е. формируется 3D описание сцены.
Разделим методы определения величины автофокусировки на активные - с управляемым источником излучения (обычно с лазером) и пассивные без управляемого источника излучения. Операции, проводимые при пассивной автофокусировке, представлены на рис. 7.18. На нём отмечены и рассматриваемые методы осуществления каждой из операций.
Рис. 7.18. Схема операций автофокусировки и методы их выполнения
Выбор набора операций и методов их осуществления уточняет вид системы автофокусировки. Примеры, приведенные ниже, поясняют определение выбранного типа автофокусировки:
- автофокусировка по общему полю, с ручным смещением поля зрения, с настройкой резкости по интегральным сигналам, без подстройки резкости в процессе наблюдения;
- автофокусировка в зоне указываемой оператором, с выбором зоны в поле фотоприемника, по соотношениям частотных компонентов, с подстройкой резкости в процессе наблюдения по интегральным сигналам.
Активные методы автофокусировки предполагают зондирование объекта дополнительным источником излучения с целью определения расстояния от оптического прибора. Оптический прибор содержит дополнительный модуль излучателя с оптикой формирования изображения зонда, направляемого на объект. Число зондов может достигать трех и более. Зонды и фотоприемники, считывающие отражённые сигналы, образуют триангуляционные, или конфокальные схемы.
Рис. 7.19. Триангуляционная схема автофокусировки
Рис. 7.19а. Конфокальная схема автофокусировки
Сокрытие зондирующих сигналов осуществляется использованием ИК излучателей. Потенциально активные приборы должны иметь наилучшие характеристики по точности определения расстояния до объекта, характеризоваться минимальной чувствительностью к посторонним засветкам.
В пассивных методах для приборов наблюдения используется рабочий световой поток, идущий от объекта. При этом оптика формирования светового пучка на фотоприемники может быть вынесена из оптики фокусируемого прибора или встроена в него. В последнем случае ухудшаются световые характеристики системы, но автоматически в сигналах учитывается положение линз рабочего объектива, что снимает или уменьшает требования по точности определения положения юстирующего узла в процессе наводки на резкость.
Устройства автофокусировки с вынесенной оптикой содержат либо прямые измерители положения юстирующего узла или в фотоприёмном устройстве имеют оптическое звено, жестко связанное с юстирующим узлом. Наводка на резкость осуществляется с учетом зависимостей между сигналами фотоприемников, положениями линз и показателями качества фокусировки.
Данная группа методов подразумевает выделение в поле изображения зоны (в предельном случае размер зоны равен размеру поля) и интегрированию оптических сигналов в различных сечениях светового потока, расположенных вдоль оптической оси приёмника. Наиболее полно операцию интегрирования отображает схема с тремя сечениями и тремя фотоприемниками. Установка одного из них, обычно центрального, при идеальной фокусировке совпадает с положением одной из плоскостей промежуточного изображения. Фокусировку ведут по разностным сигналам, получаемым от крайних фотоприемников относительно центрального. Направление движения задается по знаку разностей, а величину усилия определяет модуль разности сигналов с крайних фотоприемников.
Рис. 7.20. Положение зон интегрирования в схеме с тремя сечениями
Реально во многих решениях присутствует только один фотоприемник, а разностные сигналы получаются при смещении фокусирующего узла. При этом запоминаются значения сигналов до перемещения фокусирующего звена и используются как сигналы с предыдущих сечений. Положение плоскости регистрации сигнала обычно совпадает с положением плоскости промежуточного изображения сфокусированного прибора. В наиболее совершенных решениях учитывают динамику изменения сигналов, предсказывая момент завершения операции фокусировки.
Между многозонными устройствами и устройствами с одной зоной анализа лежат системы с интегрированием сигналов от зоны в различных зрачках. Одна из возможных схем прохождения световых сигналов в этом случае представлена на рис. 33. Следует отметить то, что строгого соблюдения размещения маски и апертурных диафрагм канала автофокусировки в требуемых плоскостях добиться сложно, поэтому реально говорить об определенном приближении к теоретической схеме.
Таким же приближением является и предположение о том, что разностный сигнал отображает только высокочастотные пространственные составляющее в изображении и, следовательно, качество фокусировки, однако определенная корреляция между ними должна быть.
Рис.7.21. Интегрирование сигналов от зоны в различных зрачках
Автофокусировка по одной зоне приемлема в режиме слежения за определенным объектом и имеет ряд недостатков при проведении обзора местности. Наиболее оптимальный вариант с отслеживанием направления взгляда оператора, подобно устройству с ИК локацией положения глазного яблока. Один из реальных выходов в данном случае ищется в интегрировании сигналов от нескольких зон и последующим логическим принятием решения. Разумно в таких системах смещать фокус, обеспечивая нижний порог разрешения по большинству зон с привилегией центральной зоны. Маски могут иметь различный вид, отображая подходы к оценке важности зон в поле зрения.
Пятиэлементная маска рис. 7.22(а) практически однородно покрывает рабочее поле, оставляя выбор важности зоны за электроникой. Трёхзонная, симметричная маска рис. 7.22(б) относится к наиболее простым. Маска рис. 7.22(в) ориентирована на наблюдение людей, средняя зона наводится на лицо человека, крайние корректируют фокусировку. В практике встречаются и восьмизонные маски. Формы масок, используемых в различных устройствах фокусировки
Рис. 7.22. Маски
Полная схема ограничения световых пучков в системе с пятью зонами, в состав которой входит и центральная крестообразная зона, показана на рис. 7.23 (линзы перед фотоприемниками удалены).
Рис. 7.23. Полная схема ограничения световых пучков
Специализированные фотоприемники, выполненные под решаемую задачу, широко используются в массовых оптических приборах. На рис. 7.24 приведен многоэлементный фотоприемник для более детального анализа светового поля.
Рис. 7.24. Многоэлементный специализированный фотоприемник для более детального анализа расфокусированных изображений
При реализации данных методов матричные или линейные многоэлементные фотоприемники считывают изображение с разрешением, близким к разрешению глаза человека. Устройства, реализующие эти методы наиболее точны, гибки, имеют наибольший диапазон по анализируемым ситуациям. Основным их недостатком является высокая стоимость.
Практически используется две схемы:
- с одним линейным или матричным CCD-приёмником;
- с двумя фотоприёмниками, образующими в пространстве стереосистему зрения.
Приёмники устанавливаются в плоскости изображения и отличаются в основном методом оценки качества наводки на резкость.
Наиболее часто встречаются патенты, в которых обыгрываются варианты использования компонентов частотного спектра. Например, в [40] выделяются зоны периферии и центра. В обеих зонах находят оценки сигналов для двух пространственных частот (вероятнее всего, это достаточно широкие полосы) и по данным четырем компонентам производится автофокусировка.
Во второй, так же обширной группе патентов, за основу берется ширина границы объектов в одной или нескольких зонах поля зрения.
В третьей группе, которая характеризуется более сложным оптическим трактом, реализуют в том или другом виде стереосистему зрения. Оценка расстояния делается по корреляционным соотношениям при сдвиге одного из сигналов.
В ряде работ подробно описаны разработанные метод и модификации схем его реализации для считывания формы объекта системой, образующей конечной мощности множество, как триангуляционных линейных зондов, так и конфокальных пучков, пространственно опережающих триангуляционные. Учитывается и динамика объекта, влияние смаза на качество фиксируемых изображений, а также приведены выражения и числовые данные для вычисления оптимального угла считывания в плоскости зондирования. Для триангуляционного зонда наилучшими углами между нормалью к участку поверхности объекта и оптической осью излучателя является угол 3° и 73° – между оптическими осями излучателя и камеры при индикатрисе отражения с раствором 20°.
Специфика рассматриваемой задачи лежит в дальности объектов от 1 м до ¥ и малой апертуре системы. Для подавления влияния излучения от предметов вне зоны фокусировки, т. е. от боковых и удаленных источников помех используются маски, изображённые на рис.7.25, 7.26.
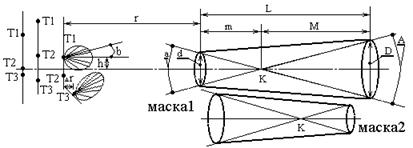
Рис. 7.25. Маски центральной зоны
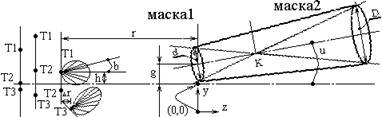
Рис. 7.26. Маска боковой зоны
На рис. 7.27 приведены частотно-контрастные характеристики идеально сфокусированной системы G, эквивалентного звена Gd, имитирующего расфокусировку,
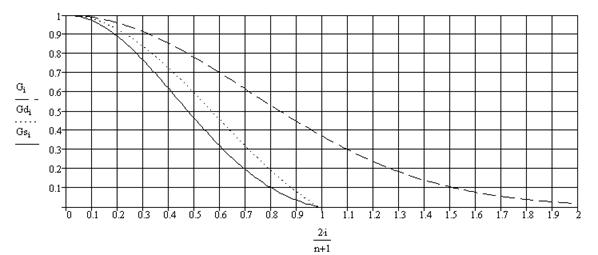
Рис.7.27. характеристика расфокусированной системы Gs.
ЧКХ оптико-электронной системы G, дефокусировки Gd и интегральная характеристика Gs. Рис. 7.28 приводит пример частотного описания объекта фокусировки со значительным набором компонентов высоких пространственных частот.
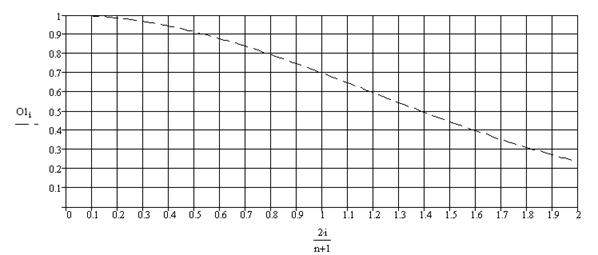
Рис. 7.28. ЧКХ изображения объекта O1
Для приведённых характеристик интегральное изменение сигналов на выходе системы, найденное по формуле
 ,
,
равно kd = 0,613, т. е. при расфокусировке сигнал снижается почти на 40 %.
При выборе схемы автофокусировки рассмотрим три решения:
¨ схема с двумя CCD-приемниками, установленными по триангуляционной схеме;
¨ автофокусировка по частотному спектру сигналов с матричных фотоприемников;
¨ автофокусировка по ширине функции рассеяния точки.
Каждая из схем имеет свою область применения, и целесообразность ее выбора зависит от типа прибора считывания формы поверхности.
Оценка дальности по сигналам с двух CCD-приемников, установленных по триангуляционной схеме, предполагает расчет корреляционных соотношений. На рис. 7.29 приведены участки сигналов с правого и левого фотоприемников.
Расчет корреляционных соотношений осуществлен интегрально по участкам всей зоны наводки на резкость. Последовательность проводимых действий во всех случаях следующая:
- нормировка;
- корреляционное соотношение со сдвинутым сигналом;
- поиск максимума.
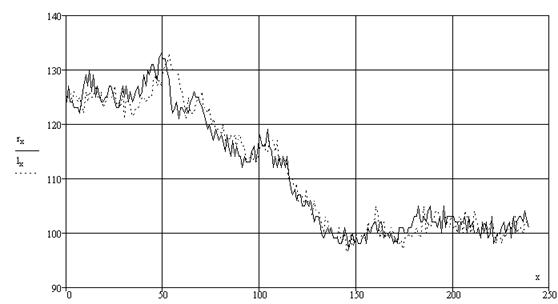
Рис. 7.29. Сигналы с правого (r сплошная линя) и левого (l пунетирная) фотоприемников
На рис. 7.30 приведены результаты расчета по всей зоне. Виден максимум на ~ 4. Его нечёткость обусловлена влиянием участков без градиента яркости на объекте.
Автофокусирующая система четче работает по участкам, размеры которых невелики, и участки назначаются только там, где есть перепады по интенсивности, т. е. на неоднородных объектах.
Рис. 7.31 показывает улучшение качества сигналов. Расчеты выполнены на участке, смещенном от начала координат на 30 пикселей, и протяженностью 41 пиксель. Виден более четкий, по сравнению с предыдущим случаем, максимум.
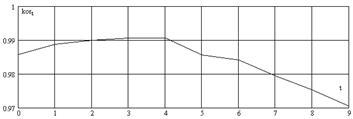
Рис. 7.30. Коэффициент корреляции, вычисленный по всей зоне
Полный алгоритм оценивает градиенты яркости на участках объекта и допускает в обработку только те участки, градиенты сигналов которых уверенно превышают уровни шумов. Современные математические пакеты позволяют достаточно гибко оперировать с изображениями объектов, выводя информацию в виде полутонового изображения, или поверхности, отображающей распределение яркости, или двумерного графика сигнала в заданном сечении, см. рис. 7.31.
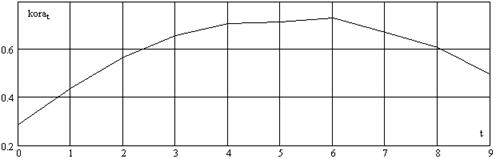
Рис. 7.31. Коэффициент корреляции, вычисленный на участке
Снимки, приведенные ниже, получены с камеры в условиях естественного освещения, расфокусировка осуществлялась смещением объектива, что частично изменялся и масштаб изображения.
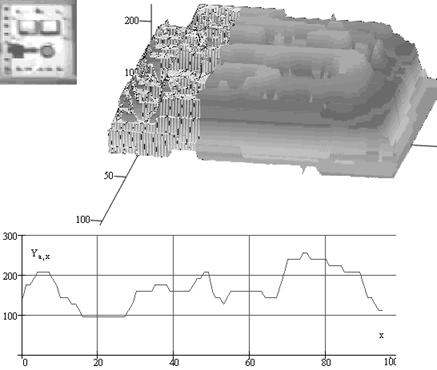
Рис. 7.32. Изображение приборной панели
|
|

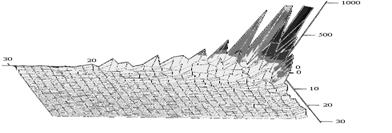
Рис. 7.33. Модуль частотного спектра слабо расфокусированного изображения приборной панели
Рис. 7.33 и 7.34 приведены модули пространственных частот изображений приборной панели при различных величинах расфокусировки, отчетливо показывают хорошо различимое изменение спектральных составляющих в области повышенных частот.
|
|

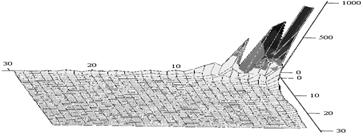
Рис. 7.34. Модуль частотного спектра сильно расфокусированного изображения приборной панели
Изменение сигналов в системе, анализирующих резкость границ объектов, а в общем случае градиенты яркости, в ходе фокусировки описываются интегралами от произведения распределения яркости в плоскости объекта на функцию рассеяния точки системы. Последняя изменяется с расфокусировкой. Достаточно хорошее приближение для ФРТ даёт формула
![]() ,где Q – ширина “колокола”, d – диаметр входного зрачка системы, F – фокусное расстояние, a – расстояние до объекта при идеальной наводке на резкость, b – величина смещения объекта от a. Рис. 7.35 показывает сходимость расчетов при a = 49 м, F = 0,2 м, d = 0,01 м. Погрешность представления не превышает 4 % в пределах смещения объекта на 20 м от положения идеальной фокусировки.
,где Q – ширина “колокола”, d – диаметр входного зрачка системы, F – фокусное расстояние, a – расстояние до объекта при идеальной наводке на резкость, b – величина смещения объекта от a. Рис. 7.35 показывает сходимость расчетов при a = 49 м, F = 0,2 м, d = 0,01 м. Погрешность представления не превышает 4 % в пределах смещения объекта на 20 м от положения идеальной фокусировки.
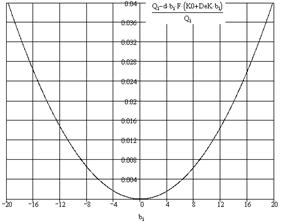
Рис.7.35. Приближение изменения ширины “колокола” ФРТ первыми членами ряда Тейлора
На рис. 7.35 приведена ширина ФРТ от сферического объекта в зависимости от величины его смещения для вышеперечисленных условий.
Данный анализ показывает линейность зависимости ширины ФРТ от диаметра входного зрачка, смещения объекта и эквивалентного фокусного расстояния системы, а так же, обратно пропорциональную зависимость границ резкости от квадрата расстояния до объекта. Данные зависимости задают шкалы расчетов смещений при проведении автофокусировки.
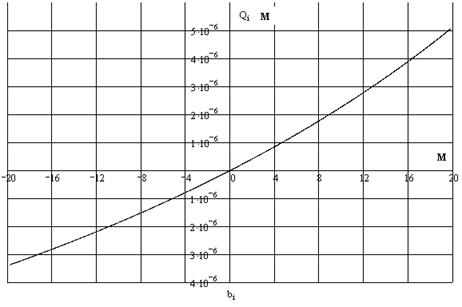
Рис. 7.36. Изменение ширины “колокола” ФРТ от смещения объекта
Рассмотрим дополнительно получение 3D информации в приборах, используемых для контроля различных объектов.
Рис. 7.39. Триангуляционный микрометр
Зондирование поверхностей осуществляется прецизионно сформированными лазерными, светодиодными пучками, оптимально передающими адаптивно подстраиваемую по форме и интенсивности считываемую метку. Для считывания изображений используются линейные многоэлементные CCD - приемники и матрицы ведущих электронных компаний мира. Обработка информации ведется быстродействующими микропроцессорами, цифровыми процессорами сигналов и центральными процессорами ПЭВМ.
Математическим базисом расчетов являются алгоритмы быстрой оптимальной цифровой обработки сигналов, фильтрации и построения трехмерных оболочек, оценки качества контролируемого изделия. Алгоритмы реализованы в программах, написанных на языках Visual C++ и ASSEMBLER, что гарантирует предельное быстродействие и контроль кода программы. Программы работают в среде Windows NT. Выбор операционной системы осуществляется по требованию Заказчика. Микрометр управляется двумя (1,5) кнопками, 2,3,4 - индикаторы результата. Диапазон контроля смещения объекта - + 3000 мкм. Дискретность индикации - 1 мкм.
Прибор предназначен для измерения биения валов, смещений объектов и т. п. Устанавливается перпендикулярно к контролируемой поверхности на расстоянии примерно 45 мм от входного окна прибора. При этом индицируется отклонение от средней линии (режим 1). Набор режимов задается Заказчиком. Быстродействующий микропроцессор позволяет усреднять результаты измерений и т. п. Прибор малогабаритен, питается от встроенных аккумуляторов.
Сканер формы поверхности пуль нарезного оружия sbf-96
Прибор позволяет считывать профилограммы в заданных сечениях и сравнивать проконтролированные объекты. Примеры профилограмм двух пуль выпущенных из одного ствола приведены на Рис.7.40 и 7.41(полярная система координат).
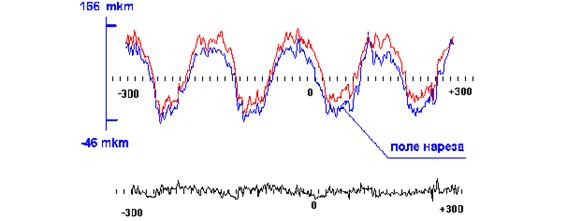 Рис.7.40. Профилограммы двух пуль выпущенных с одного ствола
Рис.7.40. Профилограммы двух пуль выпущенных с одного ствола

Рис.7.41. Профилограммы в полярной системе координат
Разрешение прибора : по глубине - 0.1 мкм, по поверхности - 10 мкм.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
