


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Теперь поэтапно получим выражение для передаточной функции системы на рис. 5.5.б. Передаточная функция внутреннего контура на основании  с учетом
с учетом  равна
равна ![]() =
=  .
.
Так как две цепи обратных связей имеют общий входной сигнал y(t) и вводятся в одну точку на входе, следовательно они образуют звено передачи, соединенное по параллельной схеме. Передаточная функция этого звена с учетом и  равна
равна ![]() . Тогда на основании (5.6) получим выражение для передаточной функции системы на рис. 5.5.б:
. Тогда на основании (5.6) получим выражение для передаточной функции системы на рис. 5.5.б:
![]() =
=  , где
, где ![]() определяется по приведенному выше выражению.
определяется по приведенному выше выражению.
Используя приведенные формулы , ,  и , а также описанные приемы и преобразования, можно получить выражения для передаточных функций систем со сложной конфигурацией схемы и со многими цепями обратных связей.
и , а также описанные приемы и преобразования, можно получить выражения для передаточных функций систем со сложной конфигурацией схемы и со многими цепями обратных связей.
16. Описание САУ в пространстве состояний. Соотношения для коэффициентов.
Дифференциальное уравнение  (2.5) можно представить в виде системы из m дифференциальных уравнений первого порядка. Для этого введем промежуточные переменные
(2.5) можно представить в виде системы из m дифференциальных уравнений первого порядка. Для этого введем промежуточные переменные ![]() , которые называют переменными состояния системы.
, которые называют переменными состояния системы.
Без нарушения общности примем в (2.5) коэффициент ![]() и перепишем это уравнение в виде:
и перепишем это уравнение в виде:  (2.10)
(2.10)
Математик Коши доказал, что этому уравнению эквивалентна следующая система уравнений:  , (2.11) где
, (2.11) где  (2.12) здесь
(2.12) здесь ![]() - символ дифференцирования.
- символ дифференцирования.
Эквивалентность (2.11) и (2.12) уравнению (2.10) обеспечивается при выполнении определенных соотношений между коэффициентами ![]() ,
, ![]() и
и ![]() . Например, при порядке системы m=3 эти соотношения имеют вид:
. Например, при порядке системы m=3 эти соотношения имеют вид:
откуда:
При m=4 имеем соответственно:
откуда легко получить выражение для коэффициентов ![]() .
.
17. Описание САУ в пространстве состояний в матричной форме. Матрицы САУ, векторы состояний, управления, наблюдения.
Дифференциальное уравнение  (2.5) можно представить в виде системы из m дифференциальных уравнений первого порядка. Для этого введем промежуточные переменные
(2.5) можно представить в виде системы из m дифференциальных уравнений первого порядка. Для этого введем промежуточные переменные ![]() , которые называют переменными состояния системы.
, которые называют переменными состояния системы.
Без нарушения общности примем в (2.5) коэффициент ![]() и перепишем это уравнение в виде:
и перепишем это уравнение в виде:  (2.10)
(2.10)
Математик Коши доказал, что этому уравнению эквивалентна следующая система уравнений:  , (2.11) где
, (2.11) где  (2.12) здесь
(2.12) здесь  - символ дифференцирования.
- символ дифференцирования.
Из этих формул легко просматривается общая закономерность получения соотношений между ![]() ,
, ![]() и
и ![]() при любом порядке системы m. На рис. 2.1 приведена последовательная структурная схема САУ в пространстве состояний.
при любом порядке системы m. На рис. 2.1 приведена последовательная структурная схема САУ в пространстве состояний.
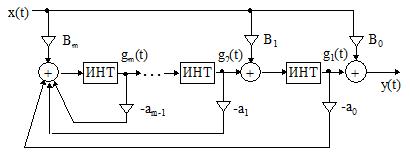
Pис. 2.1 Последовательная структурная схема системы автоматического управления в пространстве состояний
В этой схеме реализуется решение системы дифференциальных уравнений (2.12) и уравнения (2.11).
Удобство описания САУ с помощью системы (2.12) состоит в том, что можно использовать матричный аппарат. Действительно, систему (2.12) можно компактно записать в матричной форме:  , (2.13) где
, (2.13) где  ,
,  - векторы переменных состояния системы и их производных размером
- векторы переменных состояния системы и их производных размером ![]() ,
,  - вектор управления размером
- вектор управления размером ![]() ,
,  - матрица системы размером
- матрица системы размером ![]() .
.
Уравнение (2.11) также можно представить в векторной форме:  , (2.14) где
, (2.14) где ![]() - вектор наблюдения, Т - символ транспонирования вектора.
- вектор наблюдения, Т - символ транспонирования вектора.
18. Структурная схема САУ в пространстве состояний (последовательная схема).
Дифференциальное уравнение (2.5) можно представить в виде системы из m дифференциальных уравнений первого порядка. Для этого введем промежуточные переменные ![]() , которые называют переменными состояния системы.
, которые называют переменными состояния системы.
Без нарушения общности примем в (2.5) коэффициент ![]() и перепишем это уравнение в виде: (2.10)
и перепишем это уравнение в виде: (2.10)
Математик Коши доказал, что этому уравнению эквивалентна следующая система уравнений: , (2.11) где (2.12) здесь - символ дифференцирования.
Из этих формул легко просматривается общая закономерность получения соотношений между ![]() ,
, ![]() и
и ![]() при любом порядке системы m. На рис. 2.1 приведена последовательная структурная схема САУ в пространстве состояний.
при любом порядке системы m. На рис. 2.1 приведена последовательная структурная схема САУ в пространстве состояний.
Pис. 2.1 Последовательная структурная схема системы автоматического управления в пространстве состояний
В этой схеме реализуется решение системы дифференциальных уравнений (2.12) и уравнения (2.11).
На рис. 2.2 приведена структурная схема САУ в векторной форме, составленная по уравнениям (2.13) и (2.14).
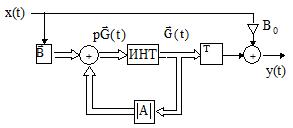
Рис. 2.2 Структурная схема САУ в векторной форме
19. Параллельная схема САУ в пространстве состояний.
В теории дробно-рациональных функций доказано, что передаточная функция (2.9) W(p) может быть представлена в виде суммы элементарных дробей:  , (2.15) где
, (2.15) где ![]() - корни уравнения
- корни уравнения  , называемые полюсами функции W(p). В общем случае полюсы могут быть действительные и комплексные, разные и кратные. Коэффициенты Аi находятся через коэффициенты аi и bi различными методами /3/ :
, называемые полюсами функции W(p). В общем случае полюсы могут быть действительные и комплексные, разные и кратные. Коэффициенты Аi находятся через коэффициенты аi и bi различными методами /3/ :
- методом неопределенных коэффициентов,
- методом подстановки численных значений,
- методом предельных значений.
Помножим левую и правую части (2.15) на изображение входного сигнала Х(р) и получим:  . (2.16)
. (2.16)
Введем обозначение  , (2.17) откуда имеем:
, (2.17) откуда имеем:  .
.
Применим обратное преобразование Лапласа для левой и правой частей этого выражения и получим:  . (2.18) Здесь i = 1, 2 ... m ;
. (2.18) Здесь i = 1, 2 ... m ; ![]() - символ дифференцирования.
- символ дифференцирования.
Каждое дифференциальное уравнение в (2.18) вычисляется по схеме на рис.2.3 (i=1).
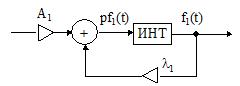
Рис. 2.3. Схема вычисления дифференциального уравнения первого порядка
На основании (2.16) с учетом (2.17) имеем: 
Применим обратное преобразование Лапласа и получим:  (2.18) где
(2.18) где ![]() - переменные состояния системы в параллельной схеме.
- переменные состояния системы в параллельной схеме.
На рис. 2.4 приведена параллельная схема САУ в пространстве состояний, в которой реализуется вычисление по (2.18).
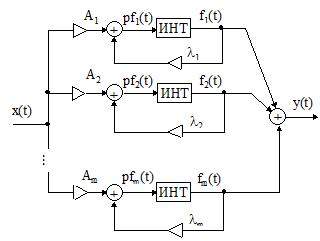
Рис. 2.4. Параллельная схема САУ в пространстве состояний
Систему уравнений (2.18) также можно записать в матричной форме:  (2.19) где
(2.19) где  ,
,  - векторы переменных состояния и их производных размером
- векторы переменных состояния и их производных размером ![]() ,
,
здесь ![]() - символы дифференцирования,
- символы дифференцирования,  - вектор управления размером
- вектор управления размером ![]() ,
,
 - диагональная матрица системы размером
- диагональная матрица системы размером ![]() .
.
Приведенные на рис. 2.1 и 2.4 схемы САУ в пространстве состояний широко используются для моделирования этих систем с помощью ЭВМ.
20. Признак и условие устойчивости САУ.
Признаком устойчивости системы является следующее: если после воздействия на систему короткого импульса она с течением времени приходит в состояние покоя, то данная система устойчива. Математически это записывается так:  .
.
Системы без обратных связей всегда устойчивы, в этих системах коэффициенты в (5.12)  .
.
Системы с обратными связями не всегда устойчивы. В неустойчивых системах возникают незатухающие колебания, которые нарушают нормальную работу систем и могут даже разрушить их.
Как уже отмечалось в разделе 2, САУ с передаточной функцией вида  описывается дифференциальным уравнением
описывается дифференциальным уравнением  , (5.12) где
, (5.12) где  символ дифференцирования.
символ дифференцирования.
После прекращения входного воздействия правая часть уравнения (5.12) равна нулю, и оно превращается в однородное дифференциальное уравнение  .
.
Решение этого уравнения имеет следующий вид:  , (5.13)
, (5.13)
где ![]() - коэффициенты,
- коэффициенты,  - полюсы. Полюсы - это корни характеристического уравнения
- полюсы. Полюсы - это корни характеристического уравнения ![]() , получаемого приравниванием нулю знаменателя функции W(р).
, получаемого приравниванием нулю знаменателя функции W(р).
В общем случае при действительных коэффициентах ![]() полюсы являются действительными или комплексно-сопряженными числами
полюсы являются действительными или комплексно-сопряженными числами
![]() или
или  ,
,  . Тогда
. Тогда  .
.
Подставив это выражение в (5.13), получим  .
.
Из этого выражения следует, что необходимым и достаточным условием устойчивости САУ, когда  , является условие
, является условие ![]() , т. е. в устойчивых системах действительные части всех корней характеристического уравнения системы должны быть отрицательны.
, т. е. в устойчивых системах действительные части всех корней характеристического уравнения системы должны быть отрицательны.
Это простое на первый взгляд условие может быть проверено на практике только при степени характеристического уравнения ![]() . При
. При ![]() общего аналитического решения характеристических уравнений не найдено. Поэтому при
общего аналитического решения характеристических уравнений не найдено. Поэтому при ![]() для оценки устойчивости САУ предложено несколько косвенных методов проверки устойчивости САУ без решения характеристического уравнения.
для оценки устойчивости САУ предложено несколько косвенных методов проверки устойчивости САУ без решения характеристического уравнения.
21. Критерий устойчивости Гурвица.
Для применения этого критерия вначале составляется квадратная матрица Гурвица размером ![]() вида:
вида:
 (5.14)
(5.14)
Порядок составления матрицы Гурвица следующий. В левом верхнем углу запишем коэффициент ![]() , по главной диагонали располагаем коэффициенты с убыванием индекса до нуля. Над элементами главной диагонали записываем коэффициенты с убыванием индексов, а под ними - коэффициенты с возрастанием индексов, как это сделано в (5.14).
, по главной диагонали располагаем коэффициенты с убыванием индекса до нуля. Над элементами главной диагонали записываем коэффициенты с убыванием индексов, а под ними - коэффициенты с возрастанием индексов, как это сделано в (5.14).
Для оценки устойчивости системы надо вычислить определители ![]() Гурвица, которые получаются из матрицы Гурвица отчеркиванием равного числа строк и столбцов от верхнего угла матрицы. Например
Гурвица, которые получаются из матрицы Гурвица отчеркиванием равного числа строк и столбцов от верхнего угла матрицы. Например 
 ,
,  и т. д. до
и т. д. до ![]() , который описывается (5.14).
, который описывается (5.14).
Критерий Гурвица гласит: если при ![]() все определители
все определители  , то система устойчива. Т. к.
, то система устойчива. Т. к.  , то при а
, то при а![]() достаточно проверить только знаки определителей
достаточно проверить только знаки определителей  .
.
Из условия  можно определить параметры системы, при которых она находится на границе устойчивости.
можно определить параметры системы, при которых она находится на границе устойчивости.
22. Критерий устойчивости Найквиста. Оценка устойчивости по ЛАЧХ и ЛФЧХ разомкнутых САУ.
Этот критерий позволяет судить об устойчивости замкнутой системы по годографу разомкнутой системы. Критерий Найквиста гласит: если годограф ККП разомкнутой системы ![]() при изменении частоты от нуля до бесконечности не охватывает на комплексной плоскости
при изменении частоты от нуля до бесконечности не охватывает на комплексной плоскости  точку с координатами -1; j0, то замкнутая система, собранная по схеме рис. 5.3.а, будет устойчива. В противном случае замкнутая система будет неустойчива. Для замкнутой системы, образованной по схеме рис. 5.3.б, вместо годографа
точку с координатами -1; j0, то замкнутая система, собранная по схеме рис. 5.3.а, будет устойчива. В противном случае замкнутая система будет неустойчива. Для замкнутой системы, образованной по схеме рис. 5.3.б, вместо годографа ![]() рассматривается годограф
рассматривается годограф 
На рис. 5.7 приведены годографы устойчивой и неустойчивой замкнутых систем.
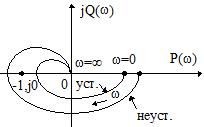
Рис. 5.7 Годографы ![]() устойчивой и неустойчивой замкнутых систем
устойчивой и неустойчивой замкнутых систем
Замкнутая система называется абсолютно устойчивой, если она может стать неустойчивой только при увеличении коэффициента усиления разомкнутой системы. Годограф такой системы приведен на рис. 5.7.
Замкнутая система называется условно устойчивой, если она может стать неустойчивой как при увеличении, так и при уменьшении коэффициента усиления разомкнутой системы.
На рис. 5.8 приведен годограф ![]() условно устойчивой замкнутой системы.
условно устойчивой замкнутой системы.
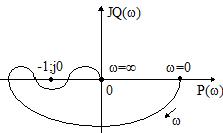
Рис. 5.8 Годограф ![]() условно устойчивой замкнутой системы
условно устойчивой замкнутой системы
Оценка устойчивости по ЛАЧХ и ЛФЧХ разомкнутых САУ смотри билет ниже (23).
23. Запасы устойчивости по фазе и усилению. Устойчивость САУ с линией задержки.
Запасы устойчивости по фазе и усилению
В годографе ККП ![]() объединены воедино амплитудно-частотная и фазочастотная характеристики, что не всегда удобно.
объединены воедино амплитудно-частотная и фазочастотная характеристики, что не всегда удобно.
Для определения количественных характеристик устойчивости замкнутой системы удобнее использовать отдельно графики АЧХ и ФЧХ разомкнутой системы. Количественными характеристиками устойчивости являются запасы устойчивости по фазе и усилению.
Запас устойчивости замкнутой системы по фазе Dj определяется по формуле  , (5.15) где
, (5.15) где ![]() - значение ФЧХ разомкнутой системы на частоте среза
- значение ФЧХ разомкнутой системы на частоте среза ![]() , на которой АЧХ разомкнутой системы
, на которой АЧХ разомкнутой системы  .
.
Для устойчивой системы ![]() , желательно, чтобы
, желательно, чтобы  радиан.
радиан.
Запас устойчивости по усилению ![]() определяется по формуле
определяется по формуле  (5.16) где
(5.16) где  - значение АЧХ разомкнутой системы на критической частоте
- значение АЧХ разомкнутой системы на критической частоте ![]() , на которой
, на которой  .
.
Для устойчивой системы ![]() , желательно, чтобы
, желательно, чтобы  .
.
Запас устойчивости по усилению для ЛАЧХ определяется по формуле 
a[дБ] = - 20lgWР(wКР). В устойчивой системе  дБ.
дБ.
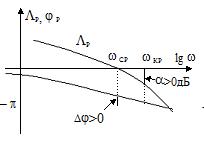
На рис. 5.9 приведены графики ЛАЧХ LР и ЛФЧХ jР для устойчивой (а) и неустойчивой (б) замкнутых систем.
(а)
(б)
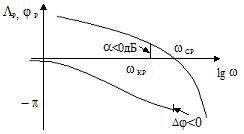
Рис.5.9. Графики ![]() ,
, ![]() для устойчивой (а) и неустойчивой (б) замкнутых систем
для устойчивой (а) и неустойчивой (б) замкнутых систем
Из рис. 5.9 следует, что в устойчивой системе  , а в неустойчивой системе
, а в неустойчивой системе  .
.
Запас устойчивости по фазе и показатель колебательности системы
Отметим, что в окрестностях частот ![]() и
и ![]() график
график ![]() изменяется мало, поэтому
изменяется мало, поэтому  jР(wСР)=jР(wП). Тогда с учетом (5.15) выражение
jР(wСР)=jР(wП). Тогда с учетом (5.15) выражение  (5.9) можно переписать в виде
(5.9) можно переписать в виде  (5.17) где
(5.17) где ![]() - запас устойчивости по фазе.
- запас устойчивости по фазе.
Тогда с учетом (5.17) выражение ![]() (5.10) перепишем в виде
(5.10) перепишем в виде  (5.18) а выражение
(5.18) а выражение  (5.11) с учетом (5.15) будет выглядеть так
(5.11) с учетом (5.15) будет выглядеть так  (5.19).
(5.19).
Выражение (5.19) также дает количественную характеристику устойчивости замкнутой системы. При ![]() показатель колебательности системы
показатель колебательности системы ![]() , что свидетельствует о переходе системы из устойчивой в неустойчивую.
, что свидетельствует о переходе системы из устойчивой в неустойчивую.
Устойчивость замкнутой системы с линией задержки
Возникает вопрос: как изменяются количественные характеристики устойчивости замкнутой системы, если в нее дополнительно включить линию задержки? (рис. 5.10).
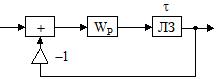
Рис. 5.10 Схема замкнутой системы с линией задержки
Как следует из раздела 4.2.10, передаточная функция линии задержки  , ее АЧХ
, ее АЧХ  , a ФЧХ
, a ФЧХ  , где
, где ![]() - время задержки. Из следует, что при последовательном соединении звеньев АЧХ перемножаются, а ФЧХ суммируются. Следовательно АЧХ разомкнутой системы
- время задержки. Из следует, что при последовательном соединении звеньев АЧХ перемножаются, а ФЧХ суммируются. Следовательно АЧХ разомкнутой системы ![]() от включения линии задержки не изменяется, а ФЧХ изменяется на величину
от включения линии задержки не изменяется, а ФЧХ изменяется на величину ![]() .
.
На рис. 5.11 приведены ЛАЧХ и ЛФЧХ разомкнутой системы без линии задержки и с линией задержки. Из этого рисунка видно, что при времени задержки ![]() замкнутая система из устойчивой превратится в неустойчивую. При
замкнутая система из устойчивой превратится в неустойчивую. При ![]() система останется устойчивой, но показатель колебательности в ней возрастет.
система останется устойчивой, но показатель колебательности в ней возрастет.
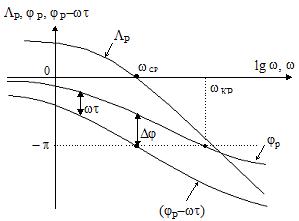
Рис. 5.11 Графики ЛАЧХ и ЛФЧХ разомкнутой системы без линии задержки и с линией задержки.
24. Электродвигатели постоянного тока. Принцип действия, устройство, схемы включения, передаточная функция, достоинства, недостатки.
Основными исполнительными устройствами в системах автоматического управления, обеспечивающими вращение, перемещение, сжатие, растяжение и другие воздействия на объект, являются электродвигатели. Они превращают электрическую энергию в механическую энергию вращения. Вращательное движение может быть преобразовано в поступательное с помощью червячных передач или других механизмов. Принцип работы электродвигателей постоянного тока основан на законе Ампера.
На рис. 4.13 показано направление сил Ампера, действующих на провода с током в виде прямоугольной рамки, находящейся в постоянном магнитном поле.
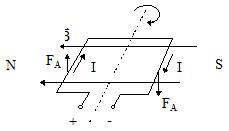
Рис. 4.13 Действие сил Ампера на рамку с током в постоянном магнитном поле
Из этого рисунка видно, что направление силы Ампера определяется по правилу левой руки: направление тока совпадает с направлением пальцев кисти, магнитные силовые линии входят в ладонь, а большой палец указывает направление силы Ампера.
Под действием этой силы рамка повернется вокруг оси по часовой стрелке.
Для работы электродвигателя постоянного тока необходимо создать в пространстве вокруг рамки постоянное магнитное поле и пропустить через нее ток.
Магнитное поле создается двумя катушками, находящимися в неподвижной части двигателя - статоре. Для обеспечения равномерного вращения применяют несколько рамок, сдвинутых относительно друг друга на некоторый угол, а для увеличения силы Ампера рамки делают из нескольких витков и помещают их на ротор из магнитомягкой стали. Для подведения к рамкам тока их концы соединяют с изолированными друг от друга пластинами из бронзы. К этим пластинам, образующим коллектор (собиратель), с помощью пружин прижимают щетки из графита или бронзы.
На рис. 4.14 изображены статор и ротор электродвигателя постоянного тока. Ротор помещается внутри статора и вращается на подшипниках.
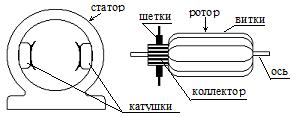
Рис. 4.14 Статор и ротор электродвигателя постоянного тока
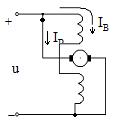
На рис. 4.15 приведены основные схемы включения электродвигателя постоянного тока: с параллельным возбуждением (а) и с последовательным возбуждением (б).
(а)
(б)
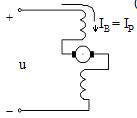
Рис. 4.15 Схемы включения электродвигателя с параллельным (а) и с последовательным (б) возбуждением
В первой схеме ток возбуждения ![]() , протекающий через создающие магнитное поле катушки внутри статора, не зависит от тока
, протекающий через создающие магнитное поле катушки внутри статора, не зависит от тока ![]() , протекающего через витки ротора, а во второй схеме
, протекающего через витки ротора, а во второй схеме ![]() . Вторая схема включения широко используется на электротранспорте: в трамваях, троллейбусах, электричках и поездах метро, так как в этой схеме при включении электродвигателя создается сильный вращательный момент ротора.
. Вторая схема включения широко используется на электротранспорте: в трамваях, троллейбусах, электричках и поездах метро, так как в этой схеме при включении электродвигателя создается сильный вращательный момент ротора.
Отметим, что электродвигатели постоянного тока будут работать и от переменного напряжения питания. Действительно, при изменении направления тока в рамке одновременно изменится и направление силовых линий магнитного поля, создаваемого током в катушке возбуждения, поэтому направление силы Ампера не изменится, и ротор будет вращаться в одну сторону. Вследствие этого описанные двигатели часто называют коллекторными. Для изменения направления вращения ротора в коллекторных электродвигателях необходимо перекоммутировать либо концы катушек возбуждения, либо провода, подводящие ток к щеткам коллектора.
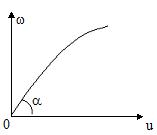
Важными характеристиками электродвигателей постоянного тока в устройствах автоматического управления являются регулировочная характеристика (рис. 4.16.а) и переходная характеристика (рис. 4.16.б). Регулировочная характеристика - это зависимость частоты вращения ротора от напряжения U.
(а)
(б)
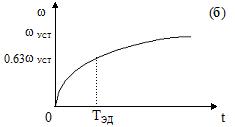
Рис. 4.16 Регулировочная (а) и переходная (б) характеристики электродвигателей
Переходной характеристикой называется зависимость частоты вращения ротора ![]() от времени t при подключении электродвигателя к напряжению u=const. Она описывается выражением
от времени t при подключении электродвигателя к напряжению u=const. Она описывается выражением  .
.
Передаточная функция электродвигателя по частоте вращения ротора соответствует инерционному звену  ,
,![]()
![]() (4.10)
(4.10)![]() где
где  , угол
, угол ![]() определяется по регулировочной характеристике.
определяется по регулировочной характеристике.
![]() - постоянная времени, которая определяется по переходной характеристике:
- постоянная времени, которая определяется по переходной характеристике:
![]() при
при  .
.
Передаточную функцию электродвигателя по углу поворота ротора  получим, принимая во внимание, что
получим, принимая во внимание, что  .
.
Отсюда  , тогда с учетом (4.10) :
, тогда с учетом (4.10) :  . (4.11)
. (4.11)
Из этого выражения следует, что для выходного сигнала, являющегося углом поворота ротора, электродвигатель является инерционно-интегрирующим звеном.
Недостатком коллекторных электродвигателей является наличие трущихся о коллектор щеток. При вращении ротора щетки искрят, вследствие чего они создают помехи радиоаппаратуре и со временем стираются (изнашиваются), поэтому их приходится периодически менять.
25. Асинхронные электродвигатели переменного тока. Принцип действия, устройство, передаточная функция, достоинства, недостатки.
От недостатка коллекторных электродвигателей свободны асинхронные электродвигатели переменного тока. В них нет коллектора и трущихся щеток, поэтому они не искрят и в них ничего не изнашивается.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
