


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() - параллельна оси x на расстоянии y0.
- параллельна оси x на расстоянии y0.
![]() - параллельна оси y на расстоянии x0.
- параллельна оси y на расстоянии x0.
 - параллельна прямой k, проходящую через точку j и т. д.
- параллельна прямой k, проходящую через точку j и т. д.
Всего 18 разновидностей операторов.
Операторы определения окружности :
![]() - совпадает с окружностью j.
- совпадает с окружностью j.
 - имеет центр с координатами x0, y0 , радиус r0.
- имеет центр с координатами x0, y0 , радиус r0.
 - центр смещен на dx0, dy0.
- центр смещен на dx0, dy0.
 - центр совпадает с окружностью cj, радиус r0.
- центр совпадает с окружностью cj, радиус r0.
 - центр в точке j, точка k на окружности.
- центр в точке j, точка k на окружности.
 - центр в точке j, касается с прямой k.
- центр в точке j, касается с прямой k.
 - проходит по трем известным точкам и т. д.
- проходит по трем известным точкам и т. д.
Всего 18 разновидностей операторов.
Существует также несколько операторов определения множества (сетки) точек, пример:  , где точки расположены между точками j и k по прямой на одинаковом расстоянии, число точек n0, включая точки j и k.
, где точки расположены между точками j и k по прямой на одинаковом расстоянии, число точек n0, включая точки j и k.
Существует несколько операторов определения контура, пример:  - продолжение контура по окружности j до точки k при i = 1 по часовой стрелке, при i =-1 против часовой стрелки.
- продолжение контура по окружности j до точки k при i = 1 по часовой стрелке, при i =-1 против часовой стрелки.
Существует несколько операторов определения поверхности.
Пример:  - задается базовым контуром j, движущимся контуром n, тип движения i.
- задается базовым контуром j, движущимся контуром n, тип движения i.
48. Операторы движения инструмента.
Операторы движения инструмента вдоль линии в общем виде можно представить следующим образом:
![]() =
= ![]() спецификация движения
спецификация движения ![]() , где i - индекс, характеризующий движение объекта (платформы, резца, фрезы, механической руки и т. д.)
, где i - индекс, характеризующий движение объекта (платформы, резца, фрезы, механической руки и т. д.)
При i = 0 осуществляется быстрое перемещение объекта в заданную точку по кратчайшему пути - по прямой. Это движение еще называется позиционированием.
При i = 1 осуществляется перемещение инструмента по прямой с заданной скоростью.
При i = 2 осуществляется движение инструмента по заданной дуге окружности по часовой стрелке.
При i = 3 осуществляется движение инструмента по заданной дуге окружности против часовой стрелки.
Примеры:
m0 = p3 - позиционирование инструмента в точку p3.
m1 = p3 - линейное перемещение инструмента в точку p4 .
m2 = p4 c2 p5 - движение инструмента по окружности c2 по часовой стрелке от точки p4 до точки p5.
49. Исполнительные устройства в СЧПУ и их характеристики.
Тип механизма
Пневматический привод
Конструкция
Мембрана с пружиной
Источник энергии
Давление сжатого воздуха
Преобразователь управляющего сигнала
Электропневматический
Передаточная функция
Пропорциональное звено с временной задержкой
Выходная мощность, Вт
======================
Тип механизма
Гидравлический привод
Конструкция
Клапан без механической обратной связи
Источник энергии
Давление масла
Преобразователь управляющего сигнала
Электрогидравлический
Передаточная функция
Интегратор
Выходная мощность, Вт
======================
Тип механизма
Гидравлический привод
Конструкция
Клапан с механической обратной связью
Источник энергии
Давление масла
Преобразователь управляющего сигнала
Электрогидравлический
Передаточная функция
Пропорциональное звено с временной задержкой
Выходная мощность, Вт
======================
Тип механизма
Электромеханический привод
Конструкция
Электродвигатели постоянного тока с параллельным возбуждением
Источник энергии
Источники постоянного напряжения
Преобразователь управляющего сигнала
Электронный усилитель
Передаточная функция
Интегратор с регулированной постоянной времени
Выходная мощность, Вт
1
======================
Тип механизма
Электромеханический привод
Конструкция
Двухфазные электродвигатели переменного тока
Источник энергии
Источники переменного напряжения
Преобразователь управляющего сигнала
Трехпозиционное реле
Передаточная функция
Инерционно-интегрирующее звено
Выходная мощность, Вт
1
======================
Тип механизма
Электромеханический привод
Конструкция
Шаговые двигатели
Источник энергии
Источники импульсного напряжения
Преобразователь управляющего сигнала
Формирователь импульсов
Передаточная функция
Пропорционально интегрирующее звено
Выходная мощность, Вт
1
======================
50. Методы анализа нелинейных САУ.
Методы анализа нелинейных систем
Строго говоря линейных систем в природе не существует, все реальные системы нелинейны. Нелинейностью характеристик обладают различные датчики, детекторы, дискриминаторы, усилители, аналого-цифровые и цифро-аналоговые преобразователи, устройства управления и исполнительные устройства.
Общей теории анализа нелинейных систем нет. Учеными разработаны различные методы анализа нелинейных систем, которые позволяют решать задачи анализа при определенных условиях и ограничениях.
Дадим характеристику наиболее распространенным методам анализа нелинейных систем.
Метод фазовой плоскости. Этот метод называют также методом фазовых портретов или фазовых пространств. Этот метод позволяет наглядно с помощью графических построений проанализировать поведение нелинейных систем, описываемых нелинейными дифференциальными уравнениями не выше второго (третьего) порядка.
Метод кусочно-линейной аппроксимации. В этом методе используется кусочно-линейная аппроксимация характеристики нелинейного элемента, система анализируется как линейная при различных значениях сигналов, а затем результаты анализа «сшиваются». Метод отличается высокой трудоемкостью анализа и невысокой точностью результатов, особенно в точках «сшивания».
Метод гармонической линеаризации. Этот метод применяется в тех случаях, когда после нелинейного элемента включен линейный фильтр нижних частот, а входное воздействие гармоническое.
Метод статистической линеаризации. Этот метод применяется в тех случаях, когда в качестве входного сигнала действует стационарный случайный процесс. В этом методе реальный нелинейный элемент заменяется на такой линейный элемент, на выходе которого математическое ожидание и дисперсия процесса такие же, как и на выходе реального нелинейного элемента. Способы определения параметров эквивалентного линейного элемента могут быть различными.
Метод марковских процессов. Этот метод используется при нестационарных случайных входных сигналах, но аналитическое решение удается найти только для систем не выше второго порядка.
Метод моделирования на ЭВМ. Этот метод претендует на универсальность, он не имеет принципиальных ограничений на характер нелинейности и порядок системы. В настоящее время это наиболее распространенный метод анализа нелинейных систем, единственным недостатком метода является отсутствие каких-либо аналитических результатов анализа (в виде формул).
Виды нелинейностей характеристик нелинейных элементов
На рис.10.1 приведены характерные нелинейные характеристики нелинейных элементов, связывающие значения сигнала y на выходе элемента с сигналом x на его входе.
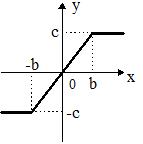
На рис.10.1а приведена характеристика усилителя-ограничителя с зоной линейности. При значениях входного сигнала ![]() выходной сигнал y=kx, где
выходной сигнал y=kx, где  , то есть выходной сигнал прямопропорционален входному сигналу. При
, то есть выходной сигнал прямопропорционален входному сигналу. При ![]() выходной сигнал
выходной сигнал ![]() , т. е. имеет место режим ограничения.
, т. е. имеет место режим ограничения.
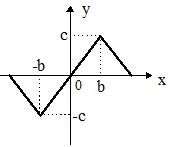
На рис.10.1.б приведена нелинейная характеристика треугольной формы с зоной линейности при ![]() .
.
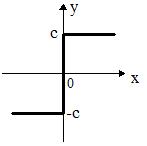
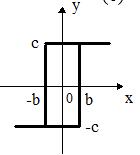
На рис.10.1.в приведена характеристика идеального ограничителя. Такую характеристику называют иногда релейной. Сигнал на выходе идеального ограничителя y=c при ![]() и y=-c при
и y=-c при ![]() .
.
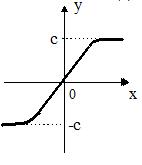
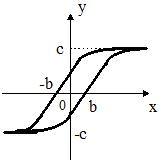
На рис.10.1.г приведена характеристика, в которой зона линейности плавно переходит в зону ограничения. Такими свойствами обладают функции y=arctgx, y=thx и некоторые другие. Такие характеристики имеют дифференциальные усилительные каскады.
На рис.10.1.д приведена характеристика вида y=csinx. Такими характеристиками обладают некоторые фазовые и частотные детекторы.
На рис.10.1.е приведена характеристика ограничителя с гистерезисом. Такой характеристикой обладают двухпозиционные поляризованные реле. В характеристиках с гистерезисом зависимость y=f(x) происходит по разному в зависимости от того, в какую сторону изменяется входной сигнал x.
На рис.10.1.ж приведена характеристика, аналогичная той, что приведена на рис.10.1.г, но с гистерезисом.
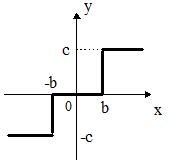
На рис.10.1.з приведена характеристика ограничителя с зоной нечувствительности. В этом ограничителе выходной сигнал y=0 при ![]() , а при
, а при ![]() выходной сигнал
выходной сигнал ![]() .
.
На рис.10.1.и приведена характеристика ограничителя с зоной нечувствительности и с гистерезисом. Такими характеристиками обладают трехпозиционные поляризованные реле или реле с нейтралью.
(а)
(б)
(в)
(г)
(д)

(е)
(ж)
(з)
(и)
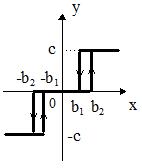
Рис.10.1 Характеристики нелинейных элементов
51. Применение метода гармонической линеаризации для анализа нелинейных САУ
На рис.10.2 приведена схема нелинейной системы, для анализа которой можно воспользоваться методом гармонической линеаризации
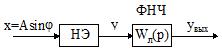
Рис.10.2 Структурная схема нелинейной системы
В этой схеме входной сигнал  - гармонический, а после нелинейного элемента НЭ включен фильтр нижних частот (ФНЧ) с передаточной функцией
- гармонический, а после нелинейного элемента НЭ включен фильтр нижних частот (ФНЧ) с передаточной функцией ![]() .
.
При гармоническом входном сигнале ![]() , где
, где ![]() сигнал y на выходе НЭ будет периодическим, но не гармоническим, так как зависимость y=f(x) нелинейная. Периодические сигналы можно представить рядом Фурье
сигнал y на выходе НЭ будет периодическим, но не гармоническим, так как зависимость y=f(x) нелинейная. Периодические сигналы можно представить рядом Фурье
 , где
, где ![]() и
и ![]() - коэффициенты ряда Фурье для первых гармоник синуса и косинуса, которые определяются по формулам:
- коэффициенты ряда Фурье для первых гармоник синуса и косинуса, которые определяются по формулам:  , (10.1)
, (10.1)  , (10.2) где y - сигнал на выходе НЭ при изменении фазы j входного сигнала x от -
, (10.2) где y - сигнал на выходе НЭ при изменении фазы j входного сигнала x от -![]() до
до ![]() ,
, ![]() - высокочастотные составляющие (высшие гармоники) в сигнале y.
- высокочастотные составляющие (высшие гармоники) в сигнале y.
Так как на выходе НЭ включен фильтр нижних частот, который не пропускает на выход высшие гармоники сигнала y, тогда на его выходе будут присутствовать только первые гармоники в сигнале y, т. е.  .
.
Так как  , откуда
, откуда  , здесь
, здесь ![]() - символ дифференцирования.
- символ дифференцирования.
Следовательно![]()
 .
.
От гармонических сигналов x и y перейдем к комплексным сигналам путем замены ![]() , тогда получим:
, тогда получим:  (10.3)
(10.3)
Это соотношение устанавливает связь между первой гармоникой комплексных сигналов на входе и выходе НЭ, для которого введем понятие нелинейного ККП  (10.4)
(10.4)
тогда  .
.
Определим коэффициенты ![]() и
и ![]() для нелинейных элементов, характеристики которых приведены на рис.10.1.в и 10.1.з.
для нелинейных элементов, характеристики которых приведены на рис.10.1.в и 10.1.з.
Для идеального ограничителя (рис.10.1.в) получим:
 =
= =
= =
=![]() ;
;
 =
= .
.
Для ограничителя с зоной нечувствительности получим
![]() =0.
=0.
Отметим, что для всех симметричных характеристик без гистерезиса ![]() =0.
=0.
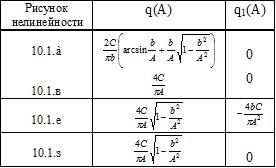
В табл.10.1 приведены выражения для расчета коэффициентов ![]() и
и ![]() наиболее характерных НЭ, характеристики которых приведены на рис.10.1.
наиболее характерных НЭ, характеристики которых приведены на рис.10.1.
Таблица 10.1:
52. Применение критерия Найквиста для определения устойчивости и параметров автоколебаний в нелинейных системах управления.
На рис.10.3 приведена структурная схема замкнутой нелинейной системы, где заштрихованный сектор в сумматоре соответствует умножению на -1.
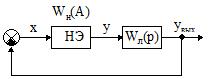
Рис.10.3 Структурная схема замкнутой нелинейной системы
Для проверки устойчивости этой системы воспользуемся критерием Найквиста, по которому автоколебания в системе возникнут, если годограф разомкнутой системы охватит на комплексной плоскости точку с координатами - 1; j 0.
Для разомкнутой схемы на рис.10.3 имеем
 , где
, где  .
.
Условия возникновения автоколебаний в замкнутой системе по критерию Найквиста математически можно записать так: ![]() , или
, или  , откуда
, откуда  (10.5)
(10.5)
Это комплексное уравнение устанавливает возможность возникновения автоколебаний в системе на рис.10.3 и позволяет определить параметры - амплитуду ![]() и частоту
и частоту ![]() этих колебаний /13/.
этих колебаний /13/.
На рис.10.4 приведено графическое уравнение (10.5) в двух случаях: когда решение единственное (рис.10.4.а) и когда есть две точки решения (рис.10.4.б).
Во втором случае установившимся будет решение в точке 2, так как этой точке соответствует большая амплитуда колебаний ![]() .
.
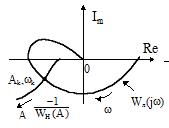
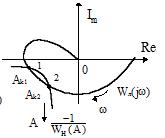
Рис.10.4 Графическое решение уравнения (10.5)
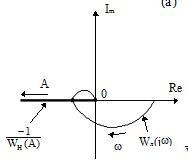
Рассмотрим примеры построения годографа ![]() для нелинейных элементов, характеристики которых приведены на рис.10.1.в и 10.1.з.
для нелинейных элементов, характеристики которых приведены на рис.10.1.в и 10.1.з.
Для идеального ограничителя (рис.10.1.в) имеем  ,
,  .
.
Тогда  .
.
Этот годограф приведен на рис.10.5.а. Он идет от нуля в -![]() по действительной оси. Отметим, что с идеальным ограничителем в замкнутой системе автоколебания возникнут всегда, если годограф линейной части системы
по действительной оси. Отметим, что с идеальным ограничителем в замкнутой системе автоколебания возникнут всегда, если годограф линейной части системы ![]() пересекает отрицательную действительную ось. Коэффициент усиления не играет роли, так как у идеального ограничителя
пересекает отрицательную действительную ось. Коэффициент усиления не играет роли, так как у идеального ограничителя ![]() .
.
Для ограничителя с зоной нечувствительности имеем
 .
.
Тогда годограф 
При  он идет по мнимой оси от нуля до
он идет по мнимой оси от нуля до ![]() , а при
, а при ![]() он идет по действительной оси из -
он идет по действительной оси из -![]() в точку с координатой
в точку с координатой ![]() j0, а затем из этой точки снова уходит в +
j0, а затем из этой точки снова уходит в +![]() . График этого годографа приведен на рис.10.5.б /5, 12/.
. График этого годографа приведен на рис.10.5.б /5, 12/.
Из этого рисунка видно, что для возникновения автоколебаний в замкнутой системе с ограничителем с зоной нечувствительности (рис.10.1.з) годограф линейной части системы должен пересечь отрицательную действительную ось левее точки с координатами ![]() j0. На рис.10.5.б этой ситуации соответствует годограф
j0. На рис.10.5.б этой ситуации соответствует годограф  .
.
Иначе говоря, коэффициент усиления линейной части системы на критической частоте должен быть больше величины ![]() . В противном случае автоколебаний в системе не будет. На рис.10.5.б этой ситуации соответствует годограф
. В противном случае автоколебаний в системе не будет. На рис.10.5.б этой ситуации соответствует годограф  .
.
(а)
(б)
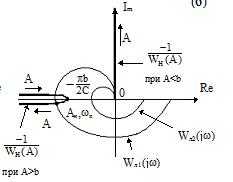
Рис.10.5 Годографы ![]() идеального (а) и неидеального (б) ограничителей
идеального (а) и неидеального (б) ограничителей

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
