


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
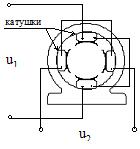
Принцип работы асинхронных электродвигателей основан на создании в пространстве внутри статора вращающегося магнитного поля. На рис.4.17 изображены статор двухфазного электродвигателя с двумя парами катушек (а), переменное напряжение  и переменное напряжение
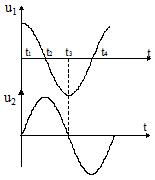
и переменное напряжение  , подводимое к первой и второй парам катушек соответственно (б), а также направление силовых линий внутри статора в моменты времени
, подводимое к первой и второй парам катушек соответственно (б), а также направление силовых линий внутри статора в моменты времени ![]() и
и ![]() (в).
(в).
(а)
(б)
(в)
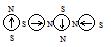
Рис. 4.17 Статор двухфазного асинхронного двигателя (а), питающие напряжения (б) и вектор магнитной индукции внутри статора (в)
В момент времени ![]() во второй паре горизонтально расположенных катушек тока нет, так как
во второй паре горизонтально расположенных катушек тока нет, так как  . В это время
. В это время  , поэтому вектор магнитной индукции
, поэтому вектор магнитной индукции ![]() направлен вертикально вверх.
направлен вертикально вверх.
В момент времени t2 в первой паре вертикально расположенных катушек тока нет, так как  . В это время
. В это время  , поэтому вектор
, поэтому вектор ![]() направлен горизонтально слева направо.
направлен горизонтально слева направо.
В момент времени ![]() имеем:
имеем:  ,
,  , поэтому вектор
, поэтому вектор ![]() направлен сверху вниз.
направлен сверху вниз.
В момент времени ![]() имеем:
имеем:  ,
,  , поэтому вектор
, поэтому вектор ![]() направлен горизонтально справа налево.
направлен горизонтально справа налево.
Из рис. 4.17.в видно, что вектор магнитного поля внутри статора вращается по часовой стрелке с частотой ![]() питающих напряжений
питающих напряжений ![]() и
и ![]() .
.
Если поместить внутри статора замкнутый проводник в виде прямоугольной рамки, то в соответствии с правилом Ленца эта рамка будет вращаться за магнитным полем. Но из-за трения в подшипниках и возможной нагрузки на оси рамки частота ее вращения будет меньше, чем частота вращения поля ![]() . Поэтому двигатели этого типа называются асинхронными. Ротор асинхронных двигателей отличается от ротора коллекторных двигателей тем, что у него нет коллектора, а витки замкнуты, т. е. конец витка соединен с его началом.
. Поэтому двигатели этого типа называются асинхронными. Ротор асинхронных двигателей отличается от ротора коллекторных двигателей тем, что у него нет коллектора, а витки замкнуты, т. е. конец витка соединен с его началом.
Часто ротор выполняется в виде так называемого беличьего колеса, когда вместо витков медной проволоки в пазы ротора заливают расплавленный алюминий, а концы этих заливок соединяют общим алюминиевым кольцом. Такой ротор легко изготавливается и не выходит из строя при перегрузках электродвигателя.
В промышленных установках чаще используются трехфазные асинхронные двигатели. К этим двигателям подводится три переменных напряжения ![]() ,
, ![]() ,
, ![]() , фазовый сдвиг между которыми равен
, фазовый сдвиг между которыми равен ![]() .
.
26. Шаговые двигатели. Принцип действия, устройство, область применения.
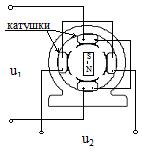
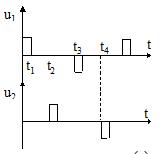
В шаговом электродвигателе ротор поворачивается на определенный угол при подаче на него очередного импульса напряжения. На рис. 4.18 изображены статор (а), импульсы питающих напряжений ![]() и
и ![]() шагового электродвигателя (б) и вектор магнитного поля внутри статора (в).
шагового электродвигателя (б) и вектор магнитного поля внутри статора (в).
Внутри статора расположен ротор в виде постоянного магнита с двумя полюсами. Разноименные полюса притягиваются, а одноименные полюса отталкиваются друг от друга, поэтому при появлении импульса в момент времени ![]() магнит ротора примет вертикальное положение, причем южный полюс ротора S будет вверху, а северный N внизу. В момент времени
магнит ротора примет вертикальное положение, причем южный полюс ротора S будет вверху, а северный N внизу. В момент времени ![]() ротор повернется на угол
ротор повернется на угол ![]() по часовой стрелке, в момент времени
по часовой стрелке, в момент времени ![]() повернется еще на
повернется еще на ![]() и т. д. Для уменьшения шага угла поворота используют шестеренчатые передачи. Шаговые двигатели применяются в электромеханических часах, в графопостроителях, в матричных принтерах, в станках с ЧПУ, в роботах и т. д.
и т. д. Для уменьшения шага угла поворота используют шестеренчатые передачи. Шаговые двигатели применяются в электромеханических часах, в графопостроителях, в матричных принтерах, в станках с ЧПУ, в роботах и т. д.
(а)
(б)
(в)
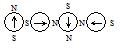
Рис. 4.18 Статор шагового двигателя (а), питающие напряжения (б) и вектор (в)
27. Тахогенераторы и сельсины. Назначение, устройство.
Тахогенераторы
Тахогенераторы формируют напряжение, пропорциональное частоте вращения ротора, т. е.  , откуда
, откуда  .
.
Так как ![]() , то преобразования Лапласа
, то преобразования Лапласа  ,
,  .
.
По определению передаточная функция тахогенератора  , после подстановки величин
, после подстановки величин ![]() и Ф(р) получим:
и Ф(р) получим:  , где
, где ![]() = [Вольт × сек] - коэффициент пропорциональности тахогенератора.
= [Вольт × сек] - коэффициент пропорциональности тахогенератора.
Из этого выражения следует, что тахогенератор является дифференциатором для угла поворота ротора. В тахогенераторах используется принцип обратимости электрических машин. Если вращать постоянный магнит внутри статора, то в его катушках будет наводиться электродвижущая сила, амплитуда которой прямо пропорциональна частоте вращения ротора.
Тахогенераторы могут быть реализованы и по другим принципам (с использованием вихревых токов, счетчиков импульсов и т. д.).
Сельсины
Сельсины предназначены для дистанционной передачи угла поворота ротора или вращающегося вала.
На рис. 4.19 приведена схема соединения между сельсином-передатчиком и сельсином-приемником. На статорах сельсинов расположены под углом ![]() три катушки. Роторы сельсинов представляют собой электромагниты, которые возбуждаются обмотками, подключенными к источнику переменного напряжения. При повороте ротора одного из сельсинов (передатчика) ротор второго сельсина (приемника) повернется на такой же угол, в результате взаимодействия магнитных полей статора и ротора.
три катушки. Роторы сельсинов представляют собой электромагниты, которые возбуждаются обмотками, подключенными к источнику переменного напряжения. При повороте ротора одного из сельсинов (передатчика) ротор второго сельсина (приемника) повернется на такой же угол, в результате взаимодействия магнитных полей статора и ротора.
Поскольку между сельсином-передатчиком и сельсином-приемником расстояние может быть достаточно большим, поэтому система на рис. 4.19 осуществляет дистанционную передачу угла поворота ротора.
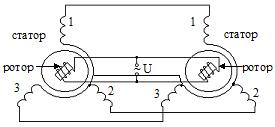


 Рис. 4.19 Схема соединений между сельсинами передатчиком и приемником
Рис. 4.19 Схема соединений между сельсинами передатчиком и приемником
28. Корректирующее звено с отставанием по фазе.
Схема корректирующего звена с отставанием по фазе приведена на рис. 4.10.а. Это звено называют также пропорционально-интегрирующим фильтром. Сигналом ![]() в этом звене является напряжение на цепи
в этом звене является напряжение на цепи ![]() .
.
По определению  , где
, где  ,
,  =
=  .
.
С учетом ![]() ,
,  ,
,  (4.2) имеем
(4.2) имеем  =
= .
.
Удобнее это выражение представить в виде:  , где
, где  ,
,  .
.
Основные характеристики:
ККП  ;
;
АЧХ  ;
;
ЛАЧХ  ;
;
ФЧХ  .
.
На рис. 4.10.б приведены ЛФЧХ и кусочно-линейная аппроксимация ЛАЧХ корректирующего звена с отставанием по фазе. Из этого рисунка видно, что ЛФЧХ отклоняется в отрицательную сторону только в окрестности частот  и
и ![]() . Исследуем функцию
. Исследуем функцию ![]() на экстремум. Для этого решим уравнение
на экстремум. Для этого решим уравнение  и получим
и получим  при
при  .
.
(а)
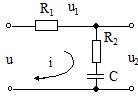
(б)
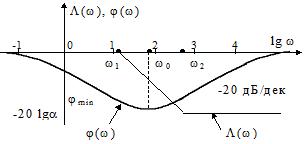
Рис. 4.10 Схема корректирующего звена с отставанием по фазе и его характеристики ![]() и
и ![]() .
.
29. Корректирующее звено с опережением по фазе.
Схема корректирующего звена с опережением по фазе приведена на рис. 4.11.а. Это звено называют также пропорционально-дифференцирующим фильтром. Выходным сигналом ![]() в этом звене является напряжение на резисторе
в этом звене является напряжение на резисторе ![]() .
.
(а)
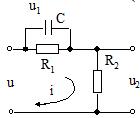
(б)
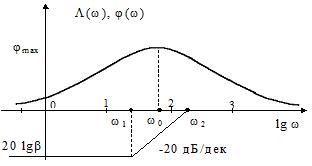
Рис. 4.11 Схема корректирующего звена с опережением по фазе и его характеристики ![]() и
и ![]() .
.
По определению  , где
, где  , =
, =  .
.
Тогда с учетом  , , (4.2) имеем:
, , (4.2) имеем:  , где
, где  ,
, ![]() .
.
Основные характеристики:
ККП  ;
;
АЧХ  ;
;
ЛАЧХ ;
ФЧХ  .
.
На рис. 4.11.б приведены ЛФЧХ и кусочно-линейная аппроксимация ЛАЧХ корректирующего звена с опережением по фазе. Из этого рисунка видно, что ЛФЧХ отклоняется в положительную сторону только в окрестности частот ![]() и
и  .
.
Исследуем функцию ![]() на экстремум. Для этого решим уравнение
на экстремум. Для этого решим уравнение 
и получим:  при
при .
.
30. Способы включения корректирующих звеньев.
Способы включения корректирующих звеньев для уменьшения ошибок в системе
Как было показано ниже, коэффициенты ошибок ![]() замкнутой системы полностью определяются коэффициентами передаточной функции
замкнутой системы полностью определяются коэффициентами передаточной функции ![]() . Для обеспечения требуемых значений коэффициентов ошибки в замкнутую систему дополнительно включают корректирующие звенья с передаточной функцией
. Для обеспечения требуемых значений коэффициентов ошибки в замкнутую систему дополнительно включают корректирующие звенья с передаточной функцией ![]() такой, чтобы результирующая передаточная функция
такой, чтобы результирующая передаточная функция  обеспечила требуемые значения коэффициентов ошибки
обеспечила требуемые значения коэффициентов ошибки ![]() .
.
Для расширения возможностей физической реализуемости передаточных функций корректирующих звеньев их можно включать по трем схемам (рис.6.3):
- последовательно (а),

- параллельно (б),
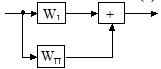
- по схеме с обратной связью (в).
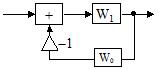
Рис.6.3 Способы включения корректирующих звеньев
При последовательной схеме соединений (рис.6.3.а) имеем:  , где
, где ![]() - передаточная функция исходной части схемы, W - желаемая для обеспечения малых ошибок передаточная функция. Тогда
- передаточная функция исходной части схемы, W - желаемая для обеспечения малых ошибок передаточная функция. Тогда ![]() .
.
Но полученная по этой формуле функция ![]() физически может быть нереализуема. Тогда можно применить схему на рис. 6.3.б. Для того, чтобы обеспечить эквивалентность схем на рис. 6.3.а и 6.3.б, должно выполняться условие :
физически может быть нереализуема. Тогда можно применить схему на рис. 6.3.б. Для того, чтобы обеспечить эквивалентность схем на рис. 6.3.а и 6.3.б, должно выполняться условие :  , откуда выражение для передаточной функции корректирующего звена при параллельном способе включения будет иметь вид :
, откуда выражение для передаточной функции корректирующего звена при параллельном способе включения будет иметь вид :  , где
, где  .
.
Если и такой способ включения не решит проблему реализуемости функции ![]() , то можно применить схему на рис. 6.3.в. В этом случае должно выполняться условие :
, то можно применить схему на рис. 6.3.в. В этом случае должно выполняться условие :
 , откуда
, откуда  , где
, где  .
.
Схема на рис. 6.3.в, кроме того, обеспечивает лучшую стабильность параметров звеньев, охваченных обратной связью.
31. Связь между частотными характеристиками разомкнутых и замкнутых САУ.
Предположим, что замкнутая система образуется из разомкнутой по схеме на рис. 5.3.а, для которой  .
.
ККП этой системы определяется по формуле
![]() =
= , (5.7) где
, (5.7) где 
 - модуль
- модуль ![]() ,
,
 - аргумент
- аргумент ![]() .
.
Числитель и знаменатель ![]() = (5.7) разделим на
= (5.7) разделим на ![]() и получим:
и получим:
 =
= ; так как
; так как  то
то  .
.
Модуль этого выражения есть АЧХ замкнутой системы:  (5.8)
(5.8)
Из этого выражения следует, что при ![]() , где
, где ![]() , величина
, величина ![]() , а при
, а при ![]() , где
, где ![]() , величина
, величина  .
.
На рис. 5.6 приведен график АЧХ замкнутой системы.
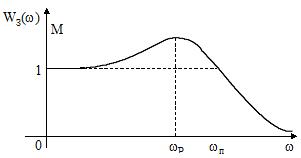
Рис. 5.6 График АЧХ замкнутой системы
Характерными точками на этом графике являются резонансная частота wР и граница полосы пропускания ![]() . На частоте
. На частоте ![]() величина
величина  , где М - максимум АЧХ, называемый показателем колебательности системы.
, где М - максимум АЧХ, называемый показателем колебательности системы.
На частоте ![]() величина
величина  .
.
Приравняем (5.8) к единице и получим ![]() , откуда
, откуда  (5.9).
(5.9).
Для установления связи между частотами ![]() и
и ![]() примем во внимание тот факт, что в окрестности частоты
примем во внимание тот факт, что в окрестности частоты ![]() ЛАЧХ разомкнутой системы имеет наклон -20 дБ/дек, т. е.
ЛАЧХ разомкнутой системы имеет наклон -20 дБ/дек, т. е.
 , причем
, причем  = 0 , тогда
= 0 , тогда  ,
,
откуда  (5.10)
(5.10)
Для нахождения максимума М - показателя колебательности системы, возьмем производную ![]() от выражения (5.8) и приравняем ее к нулю.
от выражения (5.8) и приравняем ее к нулю.
Производную от (5.8) возьмем в виде: ![]() .
.
Производная ![]() не равна нулю, следовательно равна нулю производная
не равна нулю, следовательно равна нулю производная ![]() :
: 
 . Откуда
. Откуда  .
.
Подставив это значение в (5.8), получим:
 (5.11)
(5.11)
Выражения (5.8), (5.9), (5.10) и (5.11) устанавливают связь между частотными характеристиками (АЧХ и ФЧХ) разомкнутой и замкнутой системы, соединенной по схеме рис. 5.3.а.
32. Статистическая ошибка в САУ с астатизмом нулевого и первого порядка.
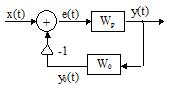
Рис.6.1 Схема одноконтурной замкнутой системы
На рис.6.1 приведена схема одноконтурной замкнутой системы. В разделе 5.1.4 было показано, что многоконтурные системы могут быть сведены к одноконтурным. Сигнал на выходе вычитающего устройства ![]() называется сигналом ошибки.
называется сигналом ошибки.
По определению передаточная функция ошибки равна  . (6.1)
. (6.1)
Из рис.6.1 следует, что  =
= , где
, где  . Тогда
. Тогда  , откуда
, откуда  .
.
С учетом (6.1) получим  . (6.2)
. (6.2)
Это выражение описывает передаточную функцию ошибки в замкнутой системе на рис.6.1 через передаточные функции входящих в нее звеньев ![]() и
и ![]() .
.
Статическая ошибка системы есть предел  . при входном сигнале
. при входном сигнале 
Так как X(p) = C/p, то  .
.
Из (6.1) имеем  , тогда
, тогда  .
.
Пример 1. Пусть  - каскадное соединение инерционного звена с усилителем. Тогда с учетом (6.2) получим
- каскадное соединение инерционного звена с усилителем. Тогда с учетом (6.2) получим  =
= .
.
Пример 2. Пусть  - каскадное соединение интегратора и инерционного звена. Тогда с учетом (6.2) получим
- каскадное соединение интегратора и инерционного звена. Тогда с учетом (6.2) получим
 =
= .
.
На рис 6.2 приведены графики e(t) в статической и астатической системах.
Система, в которой ![]() , называется статической, а система, в которой
, называется статической, а система, в которой ![]() , называется астатической. Из приведенных примеров следует, что система становится астатической, если в ее замкнутом кольце есть хотя бы одно звено интегрирования.
, называется астатической. Из приведенных примеров следует, что система становится астатической, если в ее замкнутом кольце есть хотя бы одно звено интегрирования.
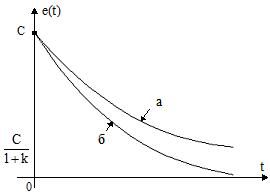
Рис.6.2 Графики зависимости ошибки e(t) в статической (а) и астатической (б) замкнутых системах автоматического управления
33. Динамические ошибки в САУ. Способы нахождения коэффициентов динамических ошибок.
Динамическими называются ошибки в замкнутой системе при входном воздействии вида
Этот сигнал относится к медленно меняющимся сигналам, так как (k+1) - ая производная этого сигнала по времени равна нулю.
Гармонический сигнал  не является медленно меняющимся, так как ни одна из его производных не равна нулю.
не является медленно меняющимся, так как ни одна из его производных не равна нулю.
Для определения динамической ошибки представим функцию ![]() рядом Тейлора
рядом Тейлора  , (6.3) где
, (6.3) где ![]() - неизвестные коэффициенты ошибки. Тогда
- неизвестные коэффициенты ошибки. Тогда  =
=  +...+
+...+  . (6.4)
. (6.4)
Этот ряд ограничен k-тым членом ряда, так как  при
при ![]() , поэтому
, поэтому  при
при ![]() .
.
Взяв от (6.4) обратное преобразование Лапласа, получим  +...+
+...+ , (6.5) где
, (6.5) где  - символ дифференцирования.
- символ дифференцирования.
В ряде (6.5) первое слагаемое ![]() называется ошибкой по положению, второе слагаемое
называется ошибкой по положению, второе слагаемое ![]() называется ошибкой по скорости, а третье слагаемое
называется ошибкой по скорости, а третье слагаемое  называется ошибкой по ускорению.
называется ошибкой по ускорению.
Коэффициенты ![]() ,
, ![]() и
и ![]() называются соответственно коэффициентами ошибки по положению, скорости и ускорению. Слагаемые более высокого порядка и входящие в них коэффициенты ошибок
называются соответственно коэффициентами ошибки по положению, скорости и ускорению. Слагаемые более высокого порядка и входящие в них коэффициенты ошибок ![]() специального названия не имеют.
специального названия не имеют.
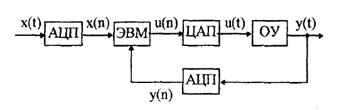
34. Схема и особенности работы цифровых систем управления.
Теорема отсчетов Котельникова-Найквиста.
Непрерывный сигнал может быть точно восстановлен по его отсчетам, если частота отсчетов более чем в 2 раза превышает верхнюю частоту в спектре этого сигнала.
Найдем ![]() - время дискретизации:
- время дискретизации:  , где
, где ![]() - частота дискретизации
- частота дискретизации
По теореме Котельникова-Найквиста: ![]() ,
,  ,где
,где  ,
, ![]() - полоса пропускания замкнутой системы.
- полоса пропускания замкнутой системы.
35. Z - преобразование (прямое и обратное, примеры).
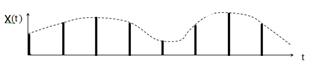
При большом числе разрядов АЦП цифровой сигнал x(n) эквивалентен дискретному сигналу ![]() , который представляется в виде последовательности взвешенных дельта-функций, площадь которых равна не единице, а значению непрерывного сигнала в моменты взятия отсчетов. Тогда, используя фильтрующее во времени свойство дельта-функций, запишем:
, который представляется в виде последовательности взвешенных дельта-функций, площадь которых равна не единице, а значению непрерывного сигнала в моменты взятия отсчетов. Тогда, используя фильтрующее во времени свойство дельта-функций, запишем:  (8.1) где n - номера отсчетов.
(8.1) где n - номера отсчетов.
Возьмем преобразование Лапласа от сигнала (8.1):  =
=  =
=  =
=  . (8.2)
. (8.2)
По выражению (8.2) определяется дискретное преобразование Лапласа (ДПЛ) по отсчетам x(nT) из непрерывного сигнала. Однако для описания цифровых систем ДПЛ не нашло широкого применения из-за неудобства, связанного с частым повторением в формулах ДПЛ функции ![]() . От этого недостатка свободно Z - преобразование, которое следует из ДПЛ введением новой комплексной переменной
. От этого недостатка свободно Z - преобразование, которое следует из ДПЛ введением новой комплексной переменной ![]() .
.
Тогда из (8.2) имеем формулу прямого Z - преобразования для сигнала x(nT)  . (8.3)
. (8.3)
Сравнивая (8.2) и (8.3), видим, что формула для прямого Z - преобразования проще и компактнее формулы для прямого ДПЛ.
Примеры прямого Z - преобразования.
Единичный импульс ![]()
Аналогично для  имеем X(p)=1.
имеем X(p)=1.
Единичный дискретный скачок
![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
