


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 =
=  .
.
Аналогично для x(t)=1(t) имеем  откуда следует удобное для практики соответствие между переменной p в преобразовании Лапласа и переменной z в Z - преобразовании
откуда следует удобное для практики соответствие между переменной p в преобразовании Лапласа и переменной z в Z - преобразовании  .
.
Наряду с прямым существует обратное Z - преобразование, которое определяется по выражению
 =
=  (8.4) где
(8.4) где  - вычеты X(z). Однократные вычеты определяются по формуле
- вычеты X(z). Однократные вычеты определяются по формуле  (8.5)
(8.5)
Выражение для X(z) в этой формуле следует представлять в следующем виде:
где ![]() ,
, ![]() - нули и полюсы функции X(z) соответственно. В табл. 8.1 приведены Z - преобразования наиболее характерных цифровых сигналов x(nT). Часто букву Т в описании этих сигналов опускают, полагая Т=1, т. е. x(nT)=x(n).
- нули и полюсы функции X(z) соответственно. В табл. 8.1 приведены Z - преобразования наиболее характерных цифровых сигналов x(nT). Часто букву Т в описании этих сигналов опускают, полагая Т=1, т. е. x(nT)=x(n).
Дискретные функции и их Z - преобразования Таблица 8.1
см. прил.
36. Основные теоремы Z - преобразования.
Линейность.
Если  , то
, то  .
.
Смещение во времени.
Если  , то
, то  .
.
Разность дискретных функций.
Если  , то
, то  =
=  .
.
Аналогия: если  то
то  ,
,  .
.
Сумма дискретных функций.
Если  то
то 
Аналогия: если  то
то 
Свертка двух дискретных функций.
Если  то
то 
Предельные соотношения:

 .
.
Из этих теорем следует, что между преобразованием Лапласа и Z - преобразованием очень много общего.
37. Системные функции ЦСУ: определение, способы нахождения при различных схемах соединений.
По аналогии с передаточными функциями для аналоговых систем в цифровых системах введено понятие системных функций, которые по определению есть отношение Z - преобразования от выходного цифрового сигнала y(nT) к Z - преобразованию от входного цифрового сигнала x(nT), т. е.  (8.5)
(8.5)
Также как и в аналоговых системах, для цифровых систем справедливы следующие соотношения:
при последовательном соединении цифровых звеньев результирующая системная функция  (8.6) где
(8.6) где ![]() - системные функции звеньев,
- системные функции звеньев,
при параллельном соединении цифровых звеньев
 (8.7)
(8.7)
при соединении звеньев по схеме с обратной связью, как на рис. 5.3.а
 (8.8)
(8.8)
при соединении звеньев по схеме с обратной связью, как на рис. 5.3.б
 (8.9)
(8.9)
38. Связь между передаточными и системными функциями при использовании стандартного и билинейного Z - преобразований.
Также, как от дифференциальных уравнений можно перейти к разностным уравнениям, от передаточных функций аналоговых систем W(p) можно перейти к системным функциям W(z). Этот переход можно сделать двумя способами:
с помощью стандартного Z - преобразования,
с помощью билинейного Z - преобразования.
При использовании стандартного Z - преобразования переход от W(p) к W(z) осуществляется заменой  , т. е.
, т. е.  (8.13)
(8.13)
Обратный переход делается по правилу
 . (8.14)
. (8.14)
Указанные переходы следуют из прямого ![]() и обратного выражений, связывающих ДПЛ и Z - преобразования.
и обратного выражений, связывающих ДПЛ и Z - преобразования.
Переход от W(p) к W(z) с помощью стандартного Z - преобразования обеспечивает высокую точность, но в результате вместо дробно-рациональных функций получаются выражения с трансцендентыми функциями, что очень неудобно для выполнения различных математических операций над ними.
От указанного недостатка свободен переход от W(p) к W(z) и обратно с помощью билинейного Z - преобразования. Это преобразование приближенное, но при этом сохраняются дробно-рациональные функции в выражениях W(p) и W(z).
При билинейном Z - преобразовании используется разложение в степенной ряд функции
 .
.
Ограничившись первым членом ряда, получим  . (8.15)
. (8.15)
Обозначим  , откуда
, откуда  .
.
Тогда (8.15) перепишем в виде  .
.
Т. к. ![]() , то ln z = pT. Приравняем правые части и получим приближенную линейную связь между p и z
, то ln z = pT. Приравняем правые части и получим приближенную линейную связь между p и z  (8.16)
(8.16)
Из (8.16) следует обратная связь между z и p  . (8.17)
. (8.17)
Тогда переход от W(p) к W(z) с помощью билинейного Z - преобразования осуществляется по формуле  . (8.18)
. (8.18)
Обратный переход от W(z) до W(p) осуществляется по формуле  . (8.19)
. (8.19)
В результате переходов от W(p) к W(z) и обратно по (8.18) и (8.19) сохраняется дробно-рациональный вид функций, причем степень функций не изменяется.
39. ККП, АЧХ и ФЧХ цифровых САУ.
Комплексный коэффициент передачи цифровых систем Wц(jq) есть отношение комплексного цифрового сигнала на выходе системы к комплексному цифровому сигналу на ее входе в установившемся режиме, т. е.  (8.20)
(8.20)
где ![]() - нормированная частота сигнала.
- нормированная частота сигнала.
Комплексный цифровой сигнал ![]() преобразуется из вещественного цифрового гармонического сигнала
преобразуется из вещественного цифрового гармонического сигнала ![]() по формуле
по формуле ![]() =
=  =
=  . (8.21)
. (8.21)
Из (8.21) следует, что вещественный цифровой сигнал есть реальная часть от комплексного цифрового сигнала.
ККП цифровой системы определяется по выражениям:  . (8.22) или
. (8.22) или  . (8.23)
. (8.23)
Выражение (8.22) использует точное стандартное Z - преобразование, а выражение (8.23) использует приближенное билинейное Z - преобразование.
Амплитудно-частотная характеристика цифровой системы есть модуль от ее ККП, т. е.
 (8.24) где
(8.24) где ![]() и
и ![]() - действительная и мнимая части ККП.
- действительная и мнимая части ККП.
Фазочастотная характеристика цифровой системы есть аргумент от ее ККП, т. е.  . (8.25)
. (8.25)
Из (8.24) и (8.25) следует, что АЧХ и ФЧХ цифровых систем являются периодическими функциями с периодом 2![]() по нормированной оси абсцисс
по нормированной оси абсцисс ![]() .
.
Пример. Дано  . Определим ККП
. Определим ККП ![]() по (8.22). Для этого в W(z) сделаем замену
по (8.22). Для этого в W(z) сделаем замену  и получим выражение для ККП:
и получим выражение для ККП:
 =
= =
= .
.
АЧХ определяется с учетом (2.24) по формуле:  ,
,
а ФЧХ с учетом (8.25) по формуле ![]() .
.
Графики АЧХ и ФЧХ этой системы приведены на рис 8.3.
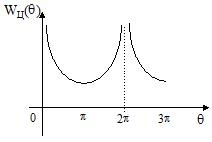
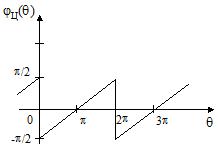
Рис.8.3 Графики АЧХ и ФЧХ цифровой системы
40. Связь между системными функциями и разностными уравнениями. Прямая и каноническая схемы цифровых САУ.
Дифференциальные уравнения применимы для аналоговых систем, а цифровые системы описываются разностными уравнениями. В разностных уравнениях время изменяется через конечный временной интервал Т - период дискретизации.
Инерционное звено с передаточной функцией  описывается дифференциальным уравнением, следующим из соотношения
описывается дифференциальным уравнением, следующим из соотношения ![]() откуда
откуда  тогда
тогда  .
.
Так как  то введя в дифференциальное уравнение дискретное время
то введя в дифференциальное уравнение дискретное время ![]() вместо t, получим следующее разностное уравнение
вместо t, получим следующее разностное уравнение  или
или  где
где ![]() .
.
Этим уравнением описывается цифровое инерционное звено первого порядка. Системные функции W(z) цифровых звеньев можно представить в двух формах:
с положительными степенями z в виде (8.10)
(8.10)
с отрицательными степенями z, которая получается из (8.10) умножением числителя и знаменателя на дробь ![]() , тогда
, тогда  =
=  (8.11) где
(8.11) где  ,
,  , откуда
, откуда ![]() .
.
Вторая форма записи W(z) используется чаще.
По определению  и с учетом (8.11) имеем:
и с учетом (8.11) имеем:  откуда
откуда 
Перейдя от изображений к оригиналам, из этого выражения получим следующее разностное уравнение при ![]() :
:  (8.12) где m - порядок разностного уравнения.
(8.12) где m - порядок разностного уравнения.
В теории дробно-рациональных функций доказано, что системная функция при четных m может быть представлена
 =
=  , =
, = , где
, где ![]() - системные функции биквадратных звеньев, которые описываются выражением
- системные функции биквадратных звеньев, которые описываются выражением 
При параллельном соединении соответствует следующее разностное уравнение (индекс опущен)
 +
+  -
- .
.
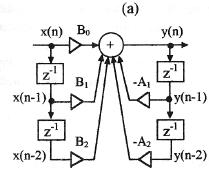
Вычисление этого разностного уравнения осуществляется по схеме цифрового звена, приведенной на рис.8.5.а. Первая часть называется нерекурсивной, а вторая часть схемы с обратными связями называется рекурсивной. Нерекурсивной части соответствует числитель выражения (8.34), а рекурсивной части соответствует знаменатель выражения (8.34). Блоки ![]() реализуют цифровую линию задержки - последовательный регистр.
реализуют цифровую линию задержки - последовательный регистр.
 где
где  - системная функция нерекурсивной части схемы,
- системная функция нерекурсивной части схемы,
 - системная функция рекурсивной части схемы.
- системная функция рекурсивной части схемы.
Так как от перестановки сомножителей произведения не меняется, то выражение (8.36) можно представить в виде ![]() .
.
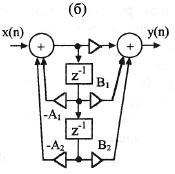
Этому выражению соответствует схема цифрового звена второго порядка, приведенная на рис. 8.5.6.
Так как в этом случае линии задержки рекурсивной и нерекурсивной частей схемы идут параллельно, то их объединяют в одну. Схема на рис. 8.5.6 получила название канонической (образцовой), так как в ней число элементов задержки в 2 раза меньше, чем в схеме на рис. 8.5.а.
41. Основные виды регуляторов в ЦСУ, цифровые интегратор и дифференциатор их системные функции и схемы.
Основные виды регуляторов:
* пропорциональный регулятор;
* интегральный регулятор (интегратор);
* пропорционально-интегральный регулятор;
* пропорционально-дифференциальный регулятор;
* пропорционально - дифференциально - интегральный регулятор.
Цифровой интегратор описывается системной функцией 
Она получается по аналогии с обычным интегратором, у которого  , в результате замены
, в результате замены  . Разностное уравнение цифрового интегратора
. Разностное уравнение цифрового интегратора  .
.
Цифровое инерционное звено первого порядка описывается системной функцией 
Разностное уравнение этого звена имеет вид  , а схема его приведена на рис. 8.4.6. При А=1 схема превращается в цифровой интегратор.
, а схема его приведена на рис. 8.4.6. При А=1 схема превращается в цифровой интегратор.
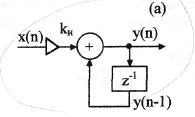
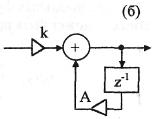
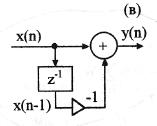
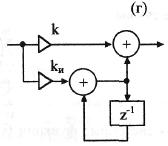
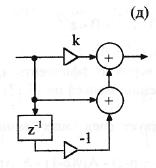
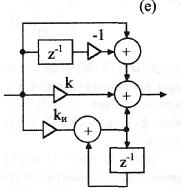
Рис. 8.4 Структурные схемы элементов цифровых систем управления: цифровой интегратор (а), инерционное звено (б), цифровой дифференциатор(в), пропорционально-интегрирующее звено (г), пропорционально-дифференцирующее звено (д) и пропорционально-интегрирующее-дифференцирующее звено (е)
Цифровой дифференциатор описывается системной функцией  .
.
Ей соответствует разностное уравнение вида  , что соответствует вычислению первой конечной разности, являющейся эквивалентом производной.
, что соответствует вычислению первой конечной разности, являющейся эквивалентом производной.
42. Структурная схема микропроцессорной системы управления, назначение блоков, достоинства и недостатки ЦСУ.
На рис.9.1 приведена структурная схема цифровой системы управления с ЭВМ в качестве устройства управления объектом /11/.

Рис.9.1 Структурная схема цифровой системы управления с ЭВМ в качестве устройства управления
В этой схеме датчики ![]() и
и ![]() преобразуют входные возмущения x и состояние объекта управления, которое характеризуется выходным сигналом y, в электрические сигналы
преобразуют входные возмущения x и состояние объекта управления, которое характеризуется выходным сигналом y, в электрические сигналы ![]() и
и ![]() . Эти сигналы с помощью измерительных контроллеров, в состав которых входят АЦП, преобразуются в цифровые сигналы x(n) и y(n), которые называются входными и выходными данными соответственно. Эти данные поступают на порты управляющей ЭВМ, которая по определенной программе обрабатывает их и с учетом результата обработки, а также по командам программы управления формирует цифровые сигналы управления объектом u(n).
. Эти сигналы с помощью измерительных контроллеров, в состав которых входят АЦП, преобразуются в цифровые сигналы x(n) и y(n), которые называются входными и выходными данными соответственно. Эти данные поступают на порты управляющей ЭВМ, которая по определенной программе обрабатывает их и с учетом результата обработки, а также по командам программы управления формирует цифровые сигналы управления объектом u(n).
Эти сигналы поступают на интерфейс взаимодействия с объектом, в состав которого может входить ЦАП. Он преобразует цифровые сигналы u(n) в аналоговые (при необходимости), которые поступают на исполнительные механизмы и управляют ими: включают, выключают, управляют их скоростью и направлением вращения и т. д. В качестве исполнительных механизмов могут быть электродвигатели или другие электроприводы, пневматические приводы, работающие от сжатого воздуха или гидравлические приводы, работающие от жидкости под большим давлением и т. д.
43. 5 особенностей управляющих ЭВМ в ЦСУ.
Универсальные ЭВМ ориентированы в первую очередь на взаимодействие с человеком. Их задача - обрабатывать данные по запросу пользователя. К универсальным ЭВМ подключаются дисплеи, клавиатура, печатающие устройства, графопостроители, устройства внешней памяти и т. д. К особенностям управляющих ЭВМ относятся:
1. Основная задача управляющей ЭВМ состоит в том, чтобы на основании полученной от датчика информации вычислить и передать на исполнительные механизмы управляющие воздействия.
Как правило, управляющие ЭВМ встраиваются в оборудование и настраиваются на конкретную область применения.
2. Важную функцию в управляющей ЭВМ выполняют системные часы - таймер. По таймеру синхронизируется (уточняется) управление блоками САУ.
3. Отличительной особенностью управляющих ЭВМ является выполнение ими операций в реальном масштабе времени, т. е. формирование управляющих воздействий не позже заданного времени. Невыполнение этого условия эквивалентно получению неправильного результата или сбою в работе САУ.
4. Для синхронизации работы программ и организации обмена данными между блоками САУ используется управляющая программа, называемая диспетчером. В этой программе реализуется алгоритм очередности выполнения разных программ по приоритетам, вплоть до прерывания выполнения текущей программы.
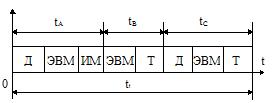
На рис.9.2 приведены временные диаграммы работы САУ при последовательном выполнении операций (а) и в режиме мультипрограммирования под управлением программы «диспетчер» (б). На этом рисунке показаны отрезки времени работы отдельных блоков САУ:
Т - терминалы (дисплей, пульт и т. д.),
Д - датчики и измерительные контроллеры
ИМ - исполнительные механизмы,.
ЭВМ - работа управляющей ЭВМ.
(а)
(б)
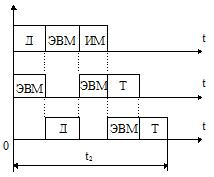
Рис.9.2. Временные диаграммы работы САУ
Из рис.9.2.а видно, что продолжительность выполнения задачи управления при последовательном выполнении команд 
t1 = tA+ tB + tC,
где ![]() - время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
- время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
![]() - время для передачи данных от ЭВМ к терминалам,
- время для передачи данных от ЭВМ к терминалам,
![]() - время для передачи данных с датчиков к ЭВМ и далее к терминалам.
- время для передачи данных с датчиков к ЭВМ и далее к терминалам.
На рис.9.2.б время ![]() - это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.9.2.а и 9.2.б видно, что
- это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.9.2.а и 9.2.б видно, что ![]() , т. е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
, т. е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
Экономия времени достигается за счет того, что во втором режиме ЭВМ работает почти непрерывно и выполняет при этом разные программы.
5. Еще одно отличие управляющих ЭВМ от универсальных состоит в разработке программного обеспечения. В управляющих ЭВМ обычно небольшой ресурс памяти для хранения программ поддержки, обеспечивающих простоту разработки и отладки программ их работы.
Для управляющих ЭВМ широко используется кросс-технология, когда программное обеспечение вначале разрабатывается на универсальных ЭВМ, а затем «перекачивается» на управляющие ЭВМ с помощью программы «транслятор». Кросс-технология поддерживается целым комплексом программ, образующих так называемую резидентную систему программ.
44. Взаимодействие управляющей ЭВМ и объекта управления через программу-диспетчер.
Для синхронизации работы программ и организации обмена данными между блоками САУ используется управляющая программа, называемая диспетчером. В этой программе реализуется алгоритм очередности выполнения разных программ по приоритетам, вплоть до прерывания выполнения текущей программы.
На рис.9.2 приведены временные диаграммы работы САУ при последовательном выполнении операций (а) и в режиме мультипрограммирования под управлением программы «диспетчер» (б). На этом рисунке показаны отрезки времени работы отдельных блоков САУ:
Т - терминалы (дисплей, пульт и т. д.),
Д - датчики и измерительные контроллеры
ИМ - исполнительные механизмы,.
ЭВМ - работа управляющей ЭВМ.
(а)
(б)
Рис.9.2. Временные диаграммы работы САУ
Из рис.9.2.а видно, что продолжительность выполнения задачи управления при последовательном выполнении команд
t1 = tA+ tB + tC,
где ![]() - время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
- время для передачи данных с датчиков на ЭВМ и формирования сигналов для исполнительных механизмов,
![]() - время для передачи данных от ЭВМ к терминалам,
- время для передачи данных от ЭВМ к терминалам,
![]() - время для передачи данных с датчиков к ЭВМ и далее к терминалам.
- время для передачи данных с датчиков к ЭВМ и далее к терминалам.
На рис.9.2.б время ![]() - это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.9.2.а и 9.2.б видно, что
- это продолжительность выполнения задачи управления объектом в режиме мультипрограммирования. Из сравнения рис.9.2.а и 9.2.б видно, что ![]() , т. е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
, т. е. в режиме работы под управлением программы «диспетчер» время для управления уменьшается, что очень важно для работы САУ в реальном масштабе времени.
Экономия времени достигается за счет того, что во втором режиме ЭВМ работает почти непрерывно и выполняет при этом разные программы.
5. Еще одно отличие управляющих ЭВМ от универсальных состоит в разработке программного обеспечения. В управляющих ЭВМ обычно небольшой ресурс памяти для хранения программ поддержки, обеспечивающих простоту разработки и отладки программ их работы.
Для управляющих ЭВМ широко используется кросс-технология, когда программное обеспечение вначале разрабатывается на универсальных ЭВМ, а затем «перекачивается» на управляющие ЭВМ с помощью программы «транслятор». Кросс-технология поддерживается целым комплексом программ, образующих так называемую резидентную систему программ.
45. Состав программного обеспечения управляющих ЭВМ.
ПО управляющих ЭВМ
*Операционные системы
**Программы организациии управления систем
1. Диспетчер
2. Обработчик прерываний
3. Драйвер внешних устройств
4. Программы управления данными
5. Программы управления задачами
6. Программы связи с оператором
7. Начальный загрузчик
**Служебныепрограммы
1. Редактор
2. Обслуживание файлов
3. Библиотекарь
4. Компоновщик
5. Загрузчик
*Резидентные
системы
1. Ассемблер
2. Транслятор
3. Библиотека прикладных программ
4. Программы-отладчики
5. Программы эмуляции и моделирования
46. Общие сведения об алгоритмических языках программирования СЧПУ. Вспомогательные операторы.
Роботы, манипуляторы и станки с числовым программным управлением (ЧПУ) являются частными случаями цифровых систем управления.
Для описания процессов обработки деталей на станках с ЧПУ, для програм-мирования работы роботов - манипуляторов применяются алгоритмические язы-ки специального назначения.
В качестве примера для СЧПУ иностранных разработок можно привести язы-ки APT. MODAPT, FART TURN / MILL, а для СЧПУ отечественных разработок языки ТАУ - Т, СПД - ЧПУ.
Эти языки обеспечивают формально - словесный способ описания процесса обработки.
Написанная на этих языках управляющая программа состоит из последова-тельности операторов и разрабатывается по следующим этапам:
1. На чертеже детали указывается система координат.
2. Каждому геометрическому объекту (точке, прямой, окружности, контуру, поверхности) ставится в соответствии номер.
3. С помощью макрокоманд рассчитываются координаты движения обрабаты-вающих инструментов или других объектов.
4. На основе рассчитанных координат задается последовательность техноло-гических команд обработки.
Последняя процедура обычно программируется совместно с технологами, так как процесс обработки должен удовлетворять определенным требованиям техно-логического процесса.
Вспомогательные операторы
К вспомогательным относятся операторы, которые задают параметры обрабатывающих инструментов, особенности генерации кодов движения инструментов, точку начала движения, а также параметры черновой и чистовой обработки поверхности деталей.
Приведем некоторые примеры вспомогательных операторов:
% GENER (k) - этот оператор задает генерацию кодов движения инструмента в абсолютных координатах при k = 0 или в приращениях координат при k = 1.
% CUTTER (d) - этот оператор задает диаметр фрезы d в мм для фрезерных станков или расстояние от центра платформы до конца резца для токарного СЧПУ.
% FROM (p, z) - этот оператор задает точку начала движения инструмента, где p - номер точки, соответствующей центру платформы с координатами (x, y), на которой крепится резец, z - исходная координата z (высота подъема) резца или оси вращения фрезы. Для токарных станков обычно z = 0.
% THICK (t) - этот оператор задает припуск на чистовую обработку поверхности после черновой , где t - величина припуска в мм.
Вспомогательные операторы находятся обычно в начале программы или макрокоманды.
Простые операторы
В алгоритмических языках имеется несколько простых операторов:
1) определение геометрических элементов;
2) присваивание;
3) безусловный переход;
4) условный переход;
5) кадр;
6) макрокоманда;
7) завершение макрокоманды;
8) ввод - вывод;
9) отображение объектов;
10) очистка экрана дисплея;
11) удаление объектов;
12) настройка параметров плоскости проекций.
Все операторы алгоритмических языков состоят из меток, имен, чисел, слу-жебных слов, имен функций, имен переменных, операций и разделителей.
Метки обозначаются символом N и целым числом: N1, N2, N3 и т. д.
Имена объектов обозначаются буквой и номером объекта или выражением. Наиболее частое обозначение следующее:
точка p
прямая l
окружность c
контур k
поверхность s
множество точек (сетка) q
47. Операторы определения геометрических объектов.
Ниже перечислены основные операторы этой группы.
Операторы определения точки:
![]() - совпадает с точкой
- совпадает с точкой ![]() .
.
 - имеет декартовы координаты
- имеет декартовы координаты ![]() .
.
![]() - находится в центре окружности j.
- находится в центре окружности j.
 - находится на пересечение прямых j, k.
- находится на пересечение прямых j, k.
 - смещена от точки j на
- смещена от точки j на ![]() и
и ![]() .
.
 - расположена симметрично точке j относительно точки k.
- расположена симметрично точке j относительно точки k.
 - расположена симметрично точке j относительно прямой k.
- расположена симметрично точке j относительно прямой k.
 - в полярных координатах r0,u0 относительно центра координат.
- в полярных координатах r0,u0 относительно центра координат.
 - в полярных координатах r0,u0 относительно точки j.
- в полярных координатах r0,u0 относительно точки j.
и т. д. всего 16 разновидностей операторов.
Операторы определения прямой:
![]() - совпадает с прямой.
- совпадает с прямой.
 - отсекает по осям координат отрезки x0, y0.
- отсекает по осям координат отрезки x0, y0.
 - то же с центром координат в точке j.
- то же с центром координат в точке j.
 - проходит через точки j и k.
- проходит через точки j и k.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
