


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Экзаменационные вопросы по дисциплине «ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ»
1. Введение. Историческая справка.
Основы теории управления - одна из дисциплин, образующих науку об управлении.
Эта наука в последние годы распространила свое влияние не только на системы управления технического характера (станки, роботы, самонаводящиеся ракеты, беспилотные самолеты, космические аппараты), но и на объекты производственного, экономического, биологического и социального характера.
Теория управления сформировалась из основ теории регулирования в первую очередь механическими, а затем электрическими объектами.
Две тысячи лет назад арабы снабдили поплавковым регулятором водяные часы. Точность хода часов повысилась за счет постоянства давления воды.
В 1675 году Гюйгенс встроил в часы маятниковый регулятор хода.
В 1765 году Ползунов в Барнауле применил поплавковый регулятор питания котла паровой машины.
В 1784 году Джеймс Уайт получил патент на центробежный регулятор скорости паровой машины.
Вскоре появились регуляторы с воздействием по производной братьев Симменсов, по нагрузке инженера Понселе, сервомоторы с жесткой обратной связью инженера Фарко, регуляторы с гибкой ОС, импульсные регуляторы, вибрационные электрические регуляторы и т. д.
Все эти практические новшества побуждали к проведению теоретических исследований. Вначале в теоретических исследованиях рассматривались лишь идеальные безынерционные регуляторы, затем стали учитываться их динамические свойства, но без учета инерционности объектов управления.
Серьезным прорывом в науке об управлении стали три работы:
- работа Джона Максвелла “О регуляторах” (1866 г.) ,
- две работы Вышнеградского “Об общей теории регуляторов” (1876г.) и “О регуляторах прямого действия” (1877 г.).
В этих работах авторы осуществили системный подход к проблеме, рассмотрев регулятор и объект управления как единую динамическую систему. Они перешли к исследованию малых колебаний в системе, впервые применили линеаризацию сложных нелинейных дифференциальных уравнений, описывающих системы регулирования, дав тем самым общий методологический подход к исследованию самых различных по конструкции и принципам действия системам автоматического регулирования (САР).
По предложению Максвелла Раус разработал алгоритм для оценки устойчивости САР по расположению корней характеристического уравнения на комплексной плоскости. Несколько позже Гурвиц вывел критерий устойчивости по детерминантам характеристического уравнения, что позволило определять устойчивость без решения уравнений высокого порядка.
Крупный вклад в теорию автоматического регулирования внес , - автор труда “О прочности движения”. Этот труд является классическим для самолетостроителей.
В 20-ом веке теория автоматического регулирования формируется как общая дисциплина благодаря работам Толле (1905 г.) , Тома (1914 г.), Штейна, Кулебакина (1926 г.), Лебедева, Боголюбова (1932 г.), Найквиста (1932 г.), Корнилова, Щегляева (1933 г.), Вознесенского (1гг.), Михайлова (1938 г.), Боде (1946 г.) и других ученых.
Одно из важных направлений исследования устойчивости в нелинейных системах автоматического регулирования (САР) развивалось в работах Ляпунова (1896 г.), Лурье (1гг.), Летова (1955 г.), Постникова (1944 г.), Айзермана (1949 г.), Попова (1959 г.).
Переходные процессы в САР с использованием фазовых пространств исследовались в работах Андронова (1гг.), Емельянова (1960 г.).
Импульсные и релейные САР глубоко и всесторонне исследованы в работах Цыпкина. Цикл этих работ был удостоен Ленинской премии в 1960 г.
В последние годы область науки о теории управления внедрилась в биологические объекты, экономические и даже социальные системы. Широкое развитие получила отрасль науки об управлении, базирующаяся на применении в качестве регуляторов и решающих устройств современных ЭВМ и новейших программных продуктов. Благодаря ЭВМ появилась теория оптимального управления по различным критериям оптимальности (работы Понтрягина, Красовского, Винера, Калмана и др.).
Теория автоматического управления в области радиотехники сформировалась в науку под названием “Радиоавтоматика”.
В сложных системах типа живых организмов, организационных человеко-машинных экономических и социальных системах законы динамики не являются основными и определяющими само управление, но их влияние существенно, поэтому отказ от их учета приводит к неверным результатам, крупным экономическим потерям, авариям, социальным взрывам и катастрофам.
Весьма характерные в этом плане вопросы промышленной динамики рассмотрены в работе Дж. Форрестера “Индустриальная динамика” (1976 г.). Перевод на русский “Основы кибернетики предприятия”.
В настоящее время создаются сложные телекоммуникационные сети и сети ЭВМ для управления крупномасштабными системами. В ракетных войсках стратегического назначения, в войсках ПВО, в МВД, в банковских структурах, у энергетиков, у железнодорожников, в почтовой связи такие сети создаются или уже созданы.
В таких сложных системах роль ЭВМ, сетей взаимодействия и программ управления с помощью ЭВМ приобретает первостепенную роль.
2. Разновидности схем автоматического управления.
Разомкнутое управление
Наиболее простым является разомкнутое управление. Структурная схема такого управления приведена на рис. 1.1, где УУ - устройство управления, ОУ - объект управления, х - входной сигнал, который может и отсутствовать, т. е. х=0 /4,5/.
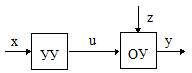
Рис.1.1 Структурная схема разомкнутого управления
При разомкнутом управлении воздействие u с выхода УУ не зависит от сигнала y на выходе объекта управления и от случайного внешнего возмущения z. Это приводит к снижению качества управления.
Разомкнутое управление с компенсацией возмущения
Указанный выше недостаток частично устраняется при разомкнутом управлении с компенсацией возмущения. Структурная схема такого управления приведена на рис.1.2.
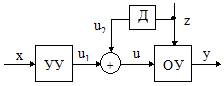
Рис. 1.2. Структурная схема разомкнутого управления
с компенсацией возмущения
В этой схеме дополнительно введены сумматор и датчик Д, преобразующий возмущение z в сигнал ![]() . В результате воздействующий на ОУ сигнал
. В результате воздействующий на ОУ сигнал  зависит от возмущения z и при определенных условиях может скомпенсировать его воздействие на ОУ.
зависит от возмущения z и при определенных условиях может скомпенсировать его воздействие на ОУ.
Замкнутое управление
Качественного управления можно достичь и без измерения возмущения z. Для этого используется обратная связь, по которой сигнал у с выхода ОУ поступает на УУ и вносит коррективы в сигнал управления u.
Структурная схема управления с обратной связью приведена на рис.1.3. Такое управление называется замкнутым.
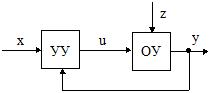
Рис. 1.3 Структурная схема управления с обратной связью
Замкнутое управление с компенсацией возмущения
Более высокое качество управления достигается при замкнутом управлении с компенсацией возмущения. Структурная схема такого управления приведена на рис. 1.4.
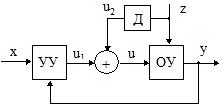
Рис. 1.4 Структурная схема замкнутого управления с компенсацией возмущения
Эта схема является суперпозицией схем на рис.1.2 и 1.3.
Стабилизация
Стабилизация - это такое управление, при котором обеспечивается постоянство сигнала у на выходе ОУ при изменении условий его работы и наличии случайных возмущений z. Входной сигнал х в этом случае является эталоном, т. е. х=соnst.
Программное управление
При программном управлении обеспечивается заданное во времени или в пространстве изменение сигнала у на выходе ОУ. Программное управление реализуется по схемам, приведенным на рис.1.1, 1.2, 1.3, 1.4.
Требуемый закон изменения сигнала у хранится в запоминающем устройстве.
3. 6 алгоритмов управления.
Следящее управление
При следящем управлении закон изменения сигнала х заранее неизвестен. В следящих системах сигнал у должен с определенной степенью точности отслеживать случайные изменения входного сигнала х. Примером следящей системы является система автоматического наведения зеркала антенны радиостанции на летящий самолет или искусственный спутник Земли. Следящее управление реализуется по схемам на рис. 1.3 и 1.4.
Экстремальное управление
Управление с поиском экстремума или экстремальное управление применяется тогда, когда необходимо поддерживать максимальное или минимальное значение выходного сигнала у при изменении входного сигнала х и случайного воздействия z. Структурная схема экстремального управления объектом приведена на рис.1.5, где УПЭ - устройство поиска экстремума.
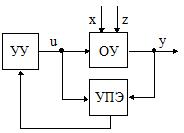
Рис. 1.5. Структурная схема экстремального управления
На рис.1.6 приведены графики зависимостей y = f(u) при х=const для ОУ экстремальных систем с поиском максимума (а) и минимума (б).
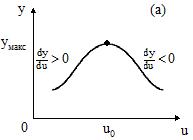
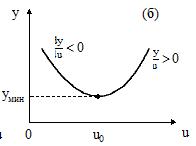
Рис. 1.6 Графики зависимостей y=f(u) для ОУ экстремальных систем
с поиском максимума (а) и минимума (б)
В точке максимума функции y=f(u) выполняются условия: ![]() ,
,  , а в точке минимума:
, а в точке минимума: ![]() ,
,  .
.
Основной проблемой поиска экстремума является неопределенность направления изменения управляющего сигнала u в начальный момент поиска. Действительно, по одному значению сигналов ![]() и
и ![]() нельзя определить направление изменения сигнала u. Для этого надо сделать небольшое приращение сигнала u в любую сторону от первоначального значения
нельзя определить направление изменения сигнала u. Для этого надо сделать небольшое приращение сигнала u в любую сторону от первоначального значения ![]() и определить знак производной
и определить знак производной  Знак производной определяется в УПЭ. Если в системе с поиском максимума (рис. 1.6.а) величина
Знак производной определяется в УПЭ. Если в системе с поиском максимума (рис. 1.6.а) величина ![]() , то направление изменения сигнала u выбрано верно. В противном случае при
, то направление изменения сигнала u выбрано верно. В противном случае при ![]() направление изменения сигнала u надо поменять на противоположное.
направление изменения сигнала u надо поменять на противоположное.
В системе с поиском минимума (рис. 1.6.б) все наоборот: при ![]() направление изменения сигнала u правильное, а при
направление изменения сигнала u правильное, а при ![]() ошибочное, т. е. система удаляется от минимума сигнала умин на выходе ОУ.
ошибочное, т. е. система удаляется от минимума сигнала умин на выходе ОУ.
Примером экстремальной системы является автоматически настраивающийся на частоты телевизионных станций телевизор. Здесь входными являются сигналы на разных частотах от различных ТВ-передатчиков, сигнал управления изменяет параметры резонансных контуров ТВ-приемника, а выходным является сигнал видеоизображения.
Оптимальное управление
Оптимальным называется такое управление, при котором в определенном смысле достигается наилучший результат. Но прежде чем реализовать оптимальное управление, необходимо сделать следующее:
1. Сформулировать критерий оптимального управления.
2. Выразить этот критерий математически.
3. Найти решение оптимального управления в виде алгоритмов и программ.
Желательно, чтобы каждое управление было оптимальным. Однако оптимальное управление не всегда реализуемо, т. к. либо не удается найти строгого решения для оптимального управления, либо техническое исполнение устройства управления оказывается чрезвычайно сложным или физически нереализуемым.
Вот некоторые примеры формулировки различных критериев оптимального управления.
1. Необходимо так изменять скорость движения автомобиля, движущегося по прямой от пункта А до пункта Б, чтобы время в пути было минимальным.
2. Необходимо так изменять скорость движения автомобиля от пункта А до пункта Б, чтобы расход горючего был минимальным.
3. Необходимо так изменять скорость движения автомобиля от пункта А до пункта Б, чтобы время в пути t было в заданных пределах  , и расход горючего был минимальным.
, и расход горючего был минимальным.
4. Необходимо так изменять скорость движения автомобиля, чтобы при запасе горючего в Q литров уехать от пункта А на максимальное расстояние.
Сформулировать критерий оптимального управления нетрудно. Сложнее выразить его математически в виде так называемой целевой функции, которая при оптимальном управлении должна быть либо максимальной, либо минимальной.
Попробуем выразить математически целевую функцию для первого критерия, самого простого с математической точки зрения.
Для этого вначале введем некоторые допущения и ограничения: мощность двигателя автомобиля позволяет развивать максимальную скорость ![]() , а при разгоне и торможении движение автомобиля будем считать равноускоренным.
, а при разгоне и торможении движение автомобиля будем считать равноускоренным.
Тогда изменение скорости движения автомобиля во времени v(t) при движении его по прямой от пункта А до пункта Б будет происходить по графику, приведенному на рис. 1.7.
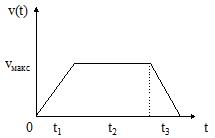
Рис. 1.7. График зависимости скорости движения автомобиля
где ![]() - время разгона до скорости
- время разгона до скорости ![]() ,
, ![]() - время движения со скоростью
- время движения со скоростью ![]() ,
, ![]() - время торможения
- время торможения
Расстояние, пройденное автомобилем, определяется по формуле:  =
= , откуда получим:
, откуда получим:  , (1.1) где
, (1.1) где  - время в пути.
- время в пути.
Из физики равноускоренного движения имеем следующие ограничения:
 где
где ![]() ,
, ![]() - ускорения автомобиля при разгоне и торможении.
- ускорения автомобиля при разгоне и торможении.
Математическая запись целевой функции для первого критерия будет иметь следующий вид:  (1.5)
(1.5)
Это выражение совместно с ограничениями (1является математической записью первого критерия оптимального управления движением автомобиля. Это типичная задача линейного программирования (ЗЛП), которая решается симплекс-методом. При двух неизвестных она может быть решена графическим методом /3/. Так как обычно ![]() , то примем
, то примем ![]() = 0.
= 0.
Тогда ЗЛП становится двумерной и целевая функция примет вид:  (1.6)
(1.6)
при ограничениях:  (1.7)
(1.7)
На рис. 1.8 приведена допустимая область времен ![]() и
и ![]() , ограниченная выражениями (1.7) , и целевая функция
, ограниченная выражениями (1.7) , и целевая функция ![]() .
.
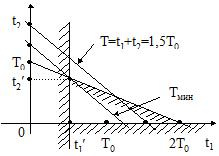
Рис.1.8 Область допустимых значений времен ![]() и
и ![]() и целевая функция
и целевая функция
Перемещая прямую  параллельно самой себе в сторону уменьшения Т, найдем минимальное время в пути:
параллельно самой себе в сторону уменьшения Т, найдем минимальное время в пути:
 =
= .
.
Из этого выражения следует, что время в пути ![]() тем меньше, чем больше ускорение при разгоне ау при фиксированном расстоянии S и максимальной скорости движения
тем меньше, чем больше ускорение при разгоне ау при фиксированном расстоянии S и максимальной скорости движения ![]() . Мы получили очевидный алгоритм оптимального управления автомобилем по критерию 1 - надо как можно быстрее разогнаться до скорости
. Мы получили очевидный алгоритм оптимального управления автомобилем по критерию 1 - надо как можно быстрее разогнаться до скорости ![]() и ехать с этой скоростью до конца пути.
и ехать с этой скоростью до конца пути.
Критерии 2, 3 и 4 имеют более сложную целевую функцию и требуют решения достаточно сложных математических задач.
Подробно оптимальное управление изучается в курсе "Теория оптимального управления".
Адаптивное управление
Адаптивным называется такое управление, алгоритм и программа работы которого изменяются в зависимости от изменения внешних условий. Системы, в которых реализуется адаптивное управление, называются адаптивными. Они подразделяются на два вида - самонастраивающиеся и самоорганизующиеся. В самонастраивающихся системах при изменении внешних условий изменяются только алгоритмы и программы управления, а в самоорганизующихся системах при изменении внешних условий изменяются как алгоритмы и программы управления, так и структурная схема управления. Такие системы относятся к классу сложных систем.
4. Основные виды регуляторов в аналоговых САУ.
Входной сигнал х в устройстве управления УУ преобразуется в сигнал u, который воздействует на объект управления ОУ. Функция преобразования сигнала х в сигнал u определяет тип регулятора в УУ.
Самым простым регулятором является пропорциональный регулятор, у которого сигнал u прямо пропорционален сигналу х, т. е. u(t) = kx(t), где k - коэффициент пропорциональности. Типичным пропорциональным регулятором является усилитель мощности. В интегральном регуляторе или просто интеграторе сигнал u пропорционален интегралу по времени от сигнала х, ![]() , где
, где ![]() - постоянная времени интегратора.
- постоянная времени интегратора.
В дифференциальном регуляторе или просто дифференциаторе сигнал пропорционален производной от сигнала х по времени: ![]() , где
, где ![]() - постоянная времени дифференциатора.
- постоянная времени дифференциатора.
В пропорционально-интегральном регуляторе сигнал u пропорционален как сигналу х, так и интегралу по времени от него  .
.
В пропорционально-дифференциальном регуляторе сигнал u пропорционален как сигналу х, так и производной по времени от него  .
.
В пропорционально-интегрально-дифференциальном регуляторе сигнал u зависит от сигнала х, от интеграла его по времени и от производной его по времени  .
.
Такие регуляторы применяются в системах, где надо отслеживать быстрые, умеренные и медленные изменения входного сигнала. На рис.1.9 приведена структурная схема такого регулятора.
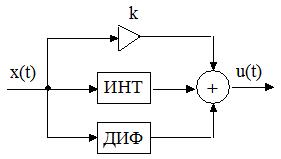
Структурная схема пропорционально-интегрально-дифференциального регулятора.
5. Описание САУ с помощью дифференциальных уравнений. Классификация САУ по коэффициентам дифференциальных уравнений. Линеаризация САУ.
см вопрос 7
6. Преобразование Лапласа (прямое и обратное) и его основные теоремы. Примеры.
Прямое и обратное преобразования Лапласа
Преобразования Лапласа играют очень важную роль при исследовании систем, описываемых дифференциальными уравнениями. С помощью прямого преобразования Лапласа можно перейти от дифференциальных уравнений к алгебраическим, решить их в алгебраической форме, а затем с помощью обратного преобразования получить искомый результат.
Прямое преобразование Лапласа осуществляется по формуле:  , (2.1) где
, (2.1) где  - комплексная переменная.
- комплексная переменная.
На функцию x(t) накладываются некоторые ограничения /3/. Иногда для простоты пользуются символической записью выражения (2.1) в виде:  , где L - оператор прямого преобразования Лапласа.
, где L - оператор прямого преобразования Лапласа.
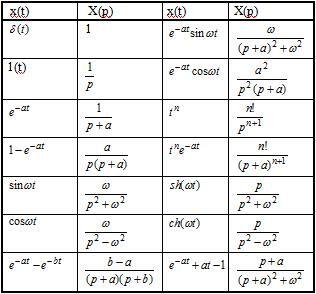
Функция x(t) называется оригиналом, а Х(р) - изображением. В таблице 2.1 приведены преобразования Лапласа для некоторых функций х(t). Кроме прямого существует также и обратное преобразование Лапласа, определяемое по формуле:  , (2.2) где интеграл берется на комплексной плоскости р вдоль любой прямой
, (2.2) где интеграл берется на комплексной плоскости р вдоль любой прямой  . Символически операцию обратного преобразования Лапласа по (2.2) записывают в виде:
. Символически операцию обратного преобразования Лапласа по (2.2) записывают в виде:  .
.
Обратное преобразование Лапласа можно определить по (2.2), из табл. 2.1, а также с помощью теоремы вычетов, из которой следует соотношение:  где
где ![]() - вычеты подынтегральной функции
- вычеты подынтегральной функции ![]() n - число полюсов функции
n - число полюсов функции ![]() где она обращается в бесконечность.
где она обращается в бесконечность.
Вычет в простом полюсе определяется по формуле:  а вычет в полюсе кратности k:
а вычет в полюсе кратности k: 
Таблица 2.1
Основные свойства преобразования Лапласа
Укажем основные свойства преобразования Лапласа, широко используемые на практике.
1. Линейность оригиналов и изображений Если  то
то 
2. Дифференцирование оригинала Если ![]() то У(р) = рХ(р) - х(0), где х(0) - значение х(t) при t = 0.
то У(р) = рХ(р) - х(0), где х(0) - значение х(t) при t = 0.
3. Интегрирование оригинала Если ![]() то
то  .
.
4. Задержка во времени оригинала Если ![]() , то
, то 
5. Свертка оригинала Если  , то
, то  . Это свойство гласит: свертке оригиналов соответствует произведение изображений.
. Это свойство гласит: свертке оригиналов соответствует произведение изображений.
6. Изменение масштаба времени оригинала Если  , то
, то  .
.
7. Смещение изображения Если У(р) = Х(р+а) , то  .
.
8. Умножение оригинала на время n раз Если  то
то  .
.
9. Деление оригинала на время Если ![]() , то
, то  .
.
10. Предельное значение оригинала 
7. Передаточная функция САУ. Определение и связь с дифференциальными уравнениями.
Передаточная функция и ее связь с дифференциальным уравнением
Связь между входным х(t) и выходным у(t) сигналами в системах автоматического управления в общем случае описывается дифференциальным уравнением вида:
 ...
... =
= ...
... . (2.4)
. (2.4)
Введем символ дифференцирования ![]() Тогда выражение
Тогда выражение ![]() можно записать в виде
можно записать в виде ![]() Запись вида
Запись вида ![]() в этом случае недопустима. Тогда уравнение (2.4) с использованием символа дифференцирования компактно можно записать в виде:
в этом случае недопустима. Тогда уравнение (2.4) с использованием символа дифференцирования компактно можно записать в виде: ![]() (2.5)
(2.5)
В этом выражении сигналы у(t) и х(t) нельзя выносить за знаки суммы, т. к. ![]() не сомножители, а символы дифференцирования.
не сомножители, а символы дифференцирования.
Преобразуем по Лапласу левую и правую части выражения (2.5) и, с учетом описанных в 2.2 первого и второго свойств, получим:  (2.6)
(2.6)
В этом выражении  являются сомножителями, поэтому изображения Y(р) и Х(р) можно вынести за знаки сумм, в результате получим:
являются сомножителями, поэтому изображения Y(р) и Х(р) можно вынести за знаки сумм, в результате получим:  . (2.7)
. (2.7)
Введем понятие передаточной функции. Передаточной функцией системы называется отношение изображения по Лапласу выходного сигнала к изображению по Лапласу входного сигнала, т. е.:  (2.8)
(2.8)
Выражение (2.8) есть математическая запись определения передаточной функции системы. Из (2.7) следует:  (2.9)
(2.9)
Выражение (2.9) показывает, что передаточная функция системы описывается дробно-рациональной функцией, являющейся отношением двух полиномов комплексного аргумента 
Выражения (2.5) и (2.9) устанавливают взаимно-однозначную связь между описываемым систему дифференциальным уравнением и ее передаточной функцией. Отсюда следует, что по дифференциальному уравнению однозначно можно записать передаточную функцию, а по виду передаточной функции - дифференциальное уравнение системы. Любая система однозначно определяется коэффициентами аi, bi и порядком m дифференциального уравнения.
Классификация систем автоматического управления по коэффициентам дифференциального уравнения
Если коэффициенты в дифференциальном уравнении (2.5) ![]() и
и ![]() не зависят от значений входного и выходного сигналов и их производных, то такие системы называются линейными.
не зависят от значений входного и выходного сигналов и их производных, то такие системы называются линейными.
Если хотя бы один из коэффициентов ![]() ,
, ![]() зависит от значений сигналов х(t) и у(t) и их производных, то такие системы называются нелинейными.
зависит от значений сигналов х(t) и у(t) и их производных, то такие системы называются нелинейными.
Если хотя бы один из коэффициентов ![]() ,
, ![]() зависит от времени, т. е. изменяется во времени, то такие системы называются параметрическими.
зависит от времени, т. е. изменяется во времени, то такие системы называются параметрическими.
Если коэффициенты ![]() ,
, ![]() зависят от времени, а также от уровня сигналов х(t), y(t) и их производных, то такие системы называются нелинейно-параметрическими.
зависят от времени, а также от уровня сигналов х(t), y(t) и их производных, то такие системы называются нелинейно-параметрическими.
Строго говоря, все системы автоматического управления являются нелинейно-параметрическими. Исследование таких систем является очень сложной задачей. Однако в ряде случаев можно сделать ряд обоснованных допущений, позволяющих упростить исследование САУ. Одним из важнейших является допущение о том, что при малых значениях входного и выходного сигналов коэффициенты ![]() и
и ![]() можно считать постоянными, а саму систему линейной. В дальнейшем при изучении основ теории управления будем считать системы линейными.
можно считать постоянными, а саму систему линейной. В дальнейшем при изучении основ теории управления будем считать системы линейными.
Теория нелинейных систем будет рассмотрена позже в соответствующих разделах.
8. Комплексный сигнал, комплексный коэффициент передачи (КПП), годограф ККП.
Гармонический и комплексный сигналы
Для исследования различных устройств и систем в качестве входного сигнала часто используют гармонические сигналы вида  , где A,
, где A, ![]() ,
, ![]() - амплитуда, угловая частота и начальная фаза гармонического сигнала,
- амплитуда, угловая частота и начальная фаза гармонического сигнала, ![]() ,
, ![]() - период гармонического сигнала.
- период гармонического сигнала.
Комплексный сигнал ![]() получается из гармонического в результате следующего математического преобразования:
получается из гармонического в результате следующего математического преобразования: ![]() =
= =
= .
.
Из этого выражения следует, что гармонический сигнал есть реальная часть от комплексного сигнала, т. е.  . (3.7)
. (3.7)
Комплексный коэффициент передачи. Годограф
Комплексным коэффициентом передачи (ККП) устройства или системы называется отношение комплексного сигнала на выходе к комплексному сигналу на входе в установившемся режиме.
Под установившимся режимом понимается тот факт, что сигнал на входе действует бесконечно долго.
Математически это определение можно записать следующим образом  (3.8)
(3.8)
где ![]() ,
, ![]() - комплексные сигналы на входе и выходе.
- комплексные сигналы на входе и выходе.
Можно показать, что аналитическое выражение для ККП получается из выражения для передаточной функции W(p), в которой делается замена ![]() , т. е.
, т. е.
Тогда из (2.9) получим:  (3.9)
(3.9)
Из этого выражения следует, что ККП является отношением полиномов аргумента ![]() .
.
Выражения ![]() при четных i дают действительные значения, а при нечетных - мнимые значения различных степеней частоты
при четных i дают действительные значения, а при нечетных - мнимые значения различных степеней частоты ![]() .
.
Принимая это во внимание, выражение (3.9) для ККП перепишем в виде  (3.10)
(3.10)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
