

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() ,
,
где ![]() - количество отсчетов изображения, имеющих значение
- количество отсчетов изображения, имеющих значение ![]() , а
, а ![]() - полное количество отсчетов изображения.
- полное количество отсчетов изображения.
Определим преобразование эквализации как
![]() ,
, ![]() , если
, если ![]() , (4.7)
, (4.7)
где  - количество квантов в выходном изображении, а символом
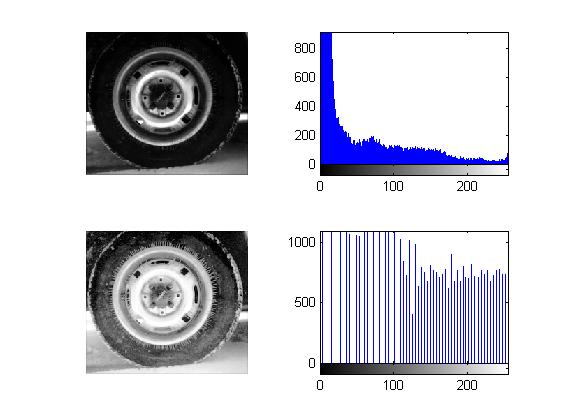
- количество квантов в выходном изображении, а символом ![]() обозначена операция получения целой части числа. На рис. 4.3 показаны исходное и преобразованное посредством (4.7) изображения. Для согласования с динамическим диапазоном принтера выходное изображение подвергнуто 4-кратному линейному усилению. Хорошо видно, что выравнивание гистограммы позволяет сделать различимыми темные детали исходного изображения.
обозначена операция получения целой части числа. На рис. 4.3 показаны исходное и преобразованное посредством (4.7) изображения. Для согласования с динамическим диапазоном принтера выходное изображение подвергнуто 4-кратному линейному усилению. Хорошо видно, что выравнивание гистограммы позволяет сделать различимыми темные детали исходного изображения.
|
Рис. 4.3. В левой колонке вверху – исходное изображение, внизу – эквализованное. В правой колонке – гистограммы. Количество уровней квантования |
Довольно часто употребляемым нелинейным преобразованием является бинаризация, описываемая функцией
 , (4.8)
, (4.8)
где ![]() - пороговое значение, определяемое контекстом исходного изображения.
- пороговое значение, определяемое контекстом исходного изображения.
Это преобразование используется, например, для препарирования изображений, содержащих объекты, яркость которых резко отличается от яркости фона, если интерес представляют только размеры или форма объектов.
На рис. 4.4 показано действие преобразования, представляющего собой комбинацию линейного и порогового
 . (4.9)
. (4.9)
Такое преобразование делает постоянной яркость фоновой части изображения, линейно контрастируя объекты.
|
|
а | б |
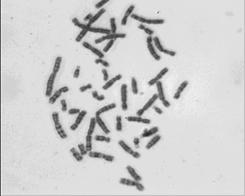
Рис. 4.4. Комбинация линейного и порогового преобразований: а – исходное изображение хромосом в поле зрения микроскопа, б – изображение, подвергнутое преобразованию (6) |
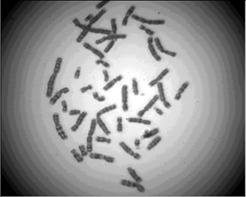
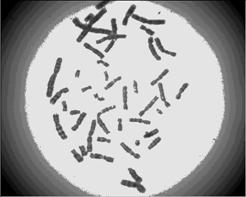
Приведенное на рис. 4а изображение получено в микроскопе с сильным виньетированием, которое проявляется в падении освещенности по мере удаления от центра поля. Поэтому при фиксированном пороге ![]() в препарированном изображении 4б сохраняется часть фона, а объекты в центре поля начинают “разрушаться”. Устранить этот недостаток можно, если известен характер виньетирования. В данном случае формирование изображения в микроскопе достаточно хорошо описывается преобразованием
в препарированном изображении 4б сохраняется часть фона, а объекты в центре поля начинают “разрушаться”. Устранить этот недостаток можно, если известен характер виньетирования. В данном случае формирование изображения в микроскопе достаточно хорошо описывается преобразованием
![]() ,
,
где ![]() - коэффициент пропускания препарата хромосом, а
- коэффициент пропускания препарата хромосом, а ![]() - функция, описывающая виньетирование. Убрав из микроскопа препарат, можно получить изображение
- функция, описывающая виньетирование. Убрав из микроскопа препарат, можно получить изображение ![]() .
.
После этого с помощью пространственно-неоднородного преобразования
![]() (4.10)
(4.10)
получается “чистое” изображение препарата хромосом, которое далее можно подвергнуть преобразованию вида (4.9). Действие преобразования (4.10) иллюстрируется рисунком 4.5.
|
Рис. 4.5. Пространственно-неоднородная коррекция виньетирования |
Простые пространственные преобразования
Пространственные преобразования являются наиболее распространенными преобразованиями изображений и используются для достижения самых различных целей. Более подробный анализ пространственных преобразований, основанный на использовании строгих критериев, будет дан в последующих лекциях, здесь же мы рассмотрим лишь достаточно простые преобразования, приводящие к интуитивно понятному результату.
Довольно часто в изображениях присутствует шум, значения которого могут резко изменяться в соседних элементах изображения. В то же время соседние значения полезной составляющей реального изображения обычно изменяются значительно медленнее. Это позволяет использовать пространственное усреднение соседних элементов изображения для ослабления влияния шума. Такое усреднение может быть выполнено посредством вычисления скользящего среднего значения
![]() . (4.11)
. (4.11)
Если значения шума в соседних элементах изображения не коррелированы, преобразование (4.11) позволяет уменьшить дисперсию шума в 9 раз. Увеличение размеров окрестности (параметров ![]() и
и ![]() ) приводит к еще большему снижению уровня шума, но при этом начинают существенно искажаться (сглаживаться) мелкие детали изображения. Модификацией преобразования (4.11) является вычисление взвешенного среднего значения
) приводит к еще большему снижению уровня шума, но при этом начинают существенно искажаться (сглаживаться) мелкие детали изображения. Модификацией преобразования (4.11) является вычисление взвешенного среднего значения
![]() ,
, ![]() , (4.12)
, (4.12)
где весовые коэффициенты ![]() уменьшаются с удалением от центра окрестности. Такое преобразование оказывает меньшее сглаживающее влияние на полезную компоненту изображения.
уменьшаются с удалением от центра окрестности. Такое преобразование оказывает меньшее сглаживающее влияние на полезную компоненту изображения.
Импульсные помехи в изображении с гладкой полезной составляющей можно ослабить с помощью преобразования
 , (4.13)
, (4.13)
где ![]() - количество элементов окрестности, а пороговое значение
- количество элементов окрестности, а пороговое значение ![]() выбирается в зависимости от уровня шума. Это преобразование сохраняет значения отсчетов изображения, если они не сильно отличаются от значений окрестности, и заменяет их на среднее значение по окрестности в случае появления резких отличий.
выбирается в зависимости от уровня шума. Это преобразование сохраняет значения отсчетов изображения, если они не сильно отличаются от значений окрестности, и заменяет их на среднее значение по окрестности в случае появления резких отличий.
Другое применение пространственных преобразований заключается в подчеркивании резких перепадов яркости, которые обычно соответствуют границам отдельных объектов. Например, преобразования с весовыми коэффициентами
 и
и  , (4.14)
, (4.14)
являясь аналогами непрерывных операторов дифференцирования в горизонтальном и вертикальном направлениях, выделяют горизонтальные и вертикальные перепады яркости, причем в зависимости от знака перепада зависит знак преобразованного изображения. Независимое от знака перепада преобразование можно выполнить с помощью весовых коэффициентов
 . (4.15)
. (4.15)
Сохраняя среднюю яркость, преобразование делает перепады зрительно более четкими. Рис. 4.6 демонстрирует действие преобразования (4.15) на дефокусированное изображение.
|
|
а | б |
Рис. 4.6. Подчеркивание перепадов яркости: а – исходное изображение, б – изображение, подвергнутое преобразованию (4.15) |


В приведенном примере хорошо видно, что выходное изображение зашумлено значительно сильнее, чем исходное. Это связано с тем, что дифференциальные преобразования, приводят к усилению высокочастотных шумов, уровень которых в исходном изображении, как правило, значительно выше уровня высокочастотной полезной составляющей. Преобразования, оптимальным образом учитывающие статистические свойства изображений, будут рассмотрены далее.
Вопросы
Что такое пространственно-однородное поэлементное преобразование? Как можно использовать эквализацию гистограммы при сравнении двух изображений, подвергнутых различным пространственно-однородным поэлементным преобразованиям? Почему при эквализации количество уровней в выходном изображении не может превышать количество уровней входного изображения? Предложите способ быстрого вычисления скользящего среднего. Чем отличается фильтрация, реализуемая согласно (4.13), от скользящего среднего? Как, используя преобразования (4.14), построить преобразование, изотропно подчеркивающее перепады яркости? Почему дифференциальные преобразования обычно увеличивают шумовую составляющую в изображениях?5. Линейная фильтрация изображений
Одной из задач обработки изображений является задача устранения искажений, возникающих в процессе их формирования. Изображения, формируемые различными информационными системами, обычно отличаются от оригинала. Эти отличия могут возникать по ряду причин. В оптических системах с большими полями зрения, как правило, масштаб фрагмента изображения зависит от расстояния до оптической оси системы. Изменение ракурса регистрации приводит к неправильной передаче углов между прямыми линиями. Это приводит к появлению в выходном изображении геометрических искажений. Дефокусировка оптической системы, конечность размеров элементов фотоприемых устройств, регистрирующих изображения, ограниченная полоса пропускания электронного тракта, движение наблюдаемых сцен относительно системы регистрации вызывают потерю четкости изображений. Наконец, работа любой реальной системы сопровождается разного рода помехами, приводящими к появлению в выходном изображении случайных шумов. Уменьшение действия искажающих факторов может быть достигнуто посредством фильтрации. Другая область применения фильтрации – изменение изображений с целью выделения в них некоторых характерных особенностей, например, обнаружения объектов определенного класса.
Под фильтрацией изображений понимается преобразование, результатом которого является выходное изображение, где каждая точка зависит от значений многих точек входного. Обычно (но не обязательно) эти точки располагаются в непосредственной близости от точки, для которой вычисляется результат фильтрации. Вид преобразования зависит от конкретной задачи, характера исходного изображения, вида искажающих факторов, критерия оценки качества результата. Наиболее разработанными, хотя и не всегда оптимальными, являются линейные фильтры, которые рассматриваются в этом разделе. Линейная фильтрация непрерывных изображений представляется интегралом суперпозиции (1.9) или интегралом свертки (1.10) для пространственно-инвариантных систем. Их аналогом в дискретных системах являются дискретный оператор суперпозиции (3.8) и дискретная свертка (3.9).
Восстановление изображений. Оптимальный линейный фильтр
В результате несовершенства формирующей изображение системы возникают искажения, которые проявляются в потере четкости и появлении случайных шумов. Зная характеристики системы, посредством фильтрации можно ослабить эти искажения. Рассмотрим линейную пространственно-инвариантную систему с импульсным откликом ![]() , воздействующую на входное изображение
, воздействующую на входное изображение ![]() . Выходное изображение
. Выходное изображение ![]() представляет собой свертку входного изображения с импульсным откликом системы, искаженную аддитивным шумом
представляет собой свертку входного изображения с импульсным откликом системы, искаженную аддитивным шумом ![]() с нулевым средним значением (рис. 5.1). Дискретный аналог этой системы представляется соотношением
с нулевым средним значением (рис. 5.1). Дискретный аналог этой системы представляется соотношением
![]() , (5.1)
, (5.1)
где ![]() и
и ![]() - размеры исходного изображения по горизонтали и вертикали соответственно.
- размеры исходного изображения по горизонтали и вертикали соответственно.
Рассмотрим сначала идеальный случай непрерывных изображений бесконечного размера.
|
Рис. 5.1. Схема формирования изображения линейной пространственно-инвариантной системой с аддитивным шумом |
Попытаемся построить линейную пространственно-инвариантную систему с импульсным откликом ![]() , воздействуя которой на изображение
, воздействуя которой на изображение ![]() можно получить изображение
можно получить изображение ![]() , “максимально похожее” на исходное изображение
, “максимально похожее” на исходное изображение  . Термин “максимально похожее” является весьма неопределенным. Одним из широко распространенных критериев оптимальности качества обработки сигналов является критерий минимума среднего квадрата ошибок. Будем рассматривать исходное изображение и результаты его преобразований как действительные стационарные случайные сигналы, подразумевая, что для описания изображений можно использовать статистические характеристики, в частности, первые и вторые моменты. Для простоты будем считать, что изображения имеют нулевые средние значения (если это не так, вычтем сначала из изображений их средние значения).
. Термин “максимально похожее” является весьма неопределенным. Одним из широко распространенных критериев оптимальности качества обработки сигналов является критерий минимума среднего квадрата ошибок. Будем рассматривать исходное изображение и результаты его преобразований как действительные стационарные случайные сигналы, подразумевая, что для описания изображений можно использовать статистические характеристики, в частности, первые и вторые моменты. Для простоты будем считать, что изображения имеют нулевые средние значения (если это не так, вычтем сначала из изображений их средние значения).
В этом случае средний квадрат ошибок можно представить в виде
![]() , (5.2)
, (5.2)
где символом ![]() обозначена операция вычисления среднего значения. Подставив в (5.2)
обозначена операция вычисления среднего значения. Подставив в (5.2)  , выраженное через
, выраженное через ![]() и
и ![]() , получим
, получим
 . (5.3)
. (5.3)
Задача построения восстанавливающей системы состоит в поиске импульсного отклика ![]() , минимизирующего средний квадрат ошибки
, минимизирующего средний квадрат ошибки ![]() .
.
Учитывая приведенные в гл. 1 определения, вычислим отдельно компоненты ошибки:
![]() ,
,
 ,
,
 .
.
Здесь все интегралы берутся в бесконечных пределах, ![]() - кросс-ковариационная функция изображений
- кросс-ковариационная функция изображений ![]() и
и ![]() ,
, ![]() - автоковариационная функция изображения
- автоковариационная функция изображения ![]() .
.
Теперь можно записать средний квадрат ошибки в виде

 . (5.4)
. (5.4)
Поиск импульсного отклика ![]() , минимизирующего
, минимизирующего ![]() , можно осуществить, руководствуясь следующими соображениями. Допустим, что
, можно осуществить, руководствуясь следующими соображениями. Допустим, что ![]() обеспечивает минимальное значение
обеспечивает минимальное значение ![]() , и
, и ![]() - произвольная функция. Тогда независимо от выбора
- произвольная функция. Тогда независимо от выбора  использование в (5.4) вместо
использование в (5.4) вместо ![]() импульсного отклика
импульсного отклика ![]() , где
, где ![]() - некоторая скалярная величина, приведет к увеличению
- некоторая скалярная величина, приведет к увеличению ![]() , скажем, до значения
, скажем, до значения ![]() . Если при
. Если при ![]() действительно достигается минимум ошибки, то
действительно достигается минимум ошибки, то
![]() .
.
Подставляя в (5.4) ![]() вместо
вместо ![]() и дифференцируя получившееся выражение по
и дифференцируя получившееся выражение по ![]() , находим
, находим
 .
.
Вычисляя предел по ![]() и приравнивая его нулю, получим уравнение
и приравнивая его нулю, получим уравнение
![]() ,
,
которое должно удовлетворяться при любой функции ![]() . Это условие выполняется, если
. Это условие выполняется, если
![]() . (5.5)
. (5.5)
Полученное интегральное уравнение позволяет найти импульсный отклик системы, восстанавливающей исходное изображение с минимальной среднеквадратичной ошибкой при условии, что известны ковариационная функция искаженного изображения и кросс-ковариационная функция исходного и искаженного изображения. Это уравнение проще всего решить, используя энергетические спектры. Пусть  - спектр мощности случайного процесса, порождающего изображение
- спектр мощности случайного процесса, порождающего изображение ![]() , а
, а  - кросс-спектр мощности процессов
- кросс-спектр мощности процессов ![]() и
и ![]() .
.
Учитывая, что левая часть уравнения (5.5) представляет собой свертку, и выполнив преобразование Фурье обеих частей уравнения, получим простое соотношение
![]() ,
,
где ![]() - частотная характеристика восстанавливающей системы. Следовательно, при известных авто - и кросс-ковариационной функциях, однозначно определяющих соответствующие спектры мощности, можно вычислить частотную характеристику
- частотная характеристика восстанавливающей системы. Следовательно, при известных авто - и кросс-ковариационной функциях, однозначно определяющих соответствующие спектры мощности, можно вычислить частотную характеристику
![]() , (5.6)
, (5.6)
а следовательно, и импульсный отклик восстанавливающей системы. Система с частотной характеристикой (5.6) известна как фильтр Винера.
Заметим, что до сих пор свойства шума и связь изображений ![]() и
и ![]() через импульсный отклик искажающей системы нигде не использовались. Нетрудно показать, что при аддитивном шуме, некоррелированном с исходным изображением
через импульсный отклик искажающей системы нигде не использовались. Нетрудно показать, что при аддитивном шуме, некоррелированном с исходным изображением ![]() , ковариационная функция
, ковариационная функция ![]() связана с ковариационными функциями исходного изображения
связана с ковариационными функциями исходного изображения ![]() и шума
и шума ![]() соотношением
соотношением
![]() ,
,
а кросс-ковариационная функция ![]() - соотношением
- соотношением
![]() .
.
(Здесь ![]() - ковариационная функция шума).
- ковариационная функция шума).
Соответствующие спектры мощности связаны как
![]()
и
![]() .
.
В этом случае оптимальная частотная характеристика восстанавливающей системы, минимизирующей средний квадрат ошибки восстановления, может быть представлена в виде
 (5.7)
(5.7)
или
 . (5.7а)
. (5.7а)
Часто под фильтром Винера подразумевают систему, обладающую именно частотной характеристикой (5.7).
Обратим внимание на следующее обстоятельство. Если шум в регистрирующей системе отсутствует, то ![]() и (5.7) приводится к очень простому виду
и (5.7) приводится к очень простому виду
![]() . (5.8)
. (5.8)
Фильтр такого типа называется инверсным. Для применения инверсного фильтра не требуется знания спектров мощности исходного изображения и шума. Существенный его недостаток состоит в бесконечном усилении гармоник, где  . На практике это означает, что любое возмущение во входном изображении, отличающее его от
. На практике это означает, что любое возмущение во входном изображении, отличающее его от ![]() , приводит к неустойчивости изображения, восстановленного инверсным фильтром, тогда как наличие в знаменателе фильтра Винера члена
, приводит к неустойчивости изображения, восстановленного инверсным фильтром, тогда как наличие в знаменателе фильтра Винера члена  стабилизирует восстановленное изображение. Если спектры мощности исходного изображения и шума неизвестны, отношение
стабилизирует восстановленное изображение. Если спектры мощности исходного изображения и шума неизвестны, отношение ![]() можно заменить отношением дисперсий
можно заменить отношением дисперсий  , которое на практике определить значительно проще.
, которое на практике определить значительно проще.
Рассмотрим теперь дискретную систему восстановления изображений. Для этого сначала периодически продолжим с периодами ![]() и
и ![]() исходное изображение
исходное изображение ![]() и импульсный отклик
и импульсный отклик ![]() . Тогда изображение, формируемое системой, показанной на рис. 5.1, будет также периодическим с периодами
. Тогда изображение, формируемое системой, показанной на рис. 5.1, будет также периодическим с периодами ![]() и
и ![]() результатом циклической свертки, искаженным периодически продолженным аддитивным шумом
результатом циклической свертки, искаженным периодически продолженным аддитивным шумом
![]() .
.
Вывод, аналогичный приведенному выше, показывает, что оптимальный восстанавливающий фильтр, минимизирующий средний квадрат ошибки, должен обладать частотной характеристикой
 . (5.9)
. (5.9)
Восстановленное изображение проще всего получить, вычислив сначала спектр искаженного изображения ![]() . Обратное дискретное преобразование Фурье произведения
. Обратное дискретное преобразование Фурье произведения
![]() (5.10)
(5.10)
даст искомое изображение.
Рассмотрим два типичных случая линейных искажающих систем и соответствующих им восстанавливающих фильтров. При съемке космических объектов через атмосферу Земли происходит “размытие” изображения, обусловленное турбулентностью атмосферы. Этот эффект приближенно можно представить действием линейной системы с импульсным откликом вида
 , (5.11)
, (5.11)
которому соответствует частотная характеристика
![]() .
.
|
|
а | б |
|
|
в | г |
| |
д | |
Рис. 5.2. Коррекция влияния атмосферной турбулентности |


Рис. 5.2 демонстрирует действие искажающей системы с импульсным откликом (5.11) и восстановление изображения соответствующими инверсным и оптимальным фильтрами. На рис. 5.2а показано исходное изображение, на рис. 5.2б – импульсный отклик искажающей системы (![]() ), а на рис. 5.2в – изображение, искаженное фильтром (5.11) с некоррелированным аддитивным шумом (отношение сигнал/шум
), а на рис. 5.2в – изображение, искаженное фильтром (5.11) с некоррелированным аддитивным шумом (отношение сигнал/шум  ). На рис. 5.2г показано изображение, восстановленное из 5.2в фильтром Винера. Для сравнения на рис. 5.2г показано изображение, восстановленное инверсным фильтром из искаженного фильтром (5.11) исходного изображения с аддитивным некоррелированным шумом при отношении сигнал/шум
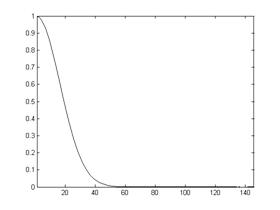
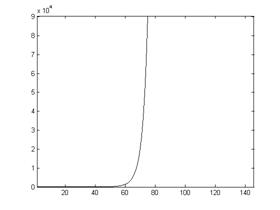
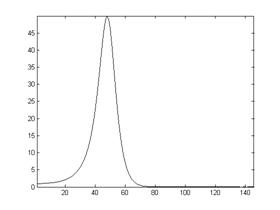
). На рис. 5.2г показано изображение, восстановленное из 5.2в фильтром Винера. Для сравнения на рис. 5.2г показано изображение, восстановленное инверсным фильтром из искаженного фильтром (5.11) исходного изображения с аддитивным некоррелированным шумом при отношении сигнал/шум ![]() . Оказывается, что инверсный фильтр дает плохое качество восстановления даже при ничтожном уровне шума. Пояснением этого эффекта служит рис. 5.3, где показаны: а – частотная характеристика фильтра (5.11), б – частотная характеристика инверсного фильтра и в – частотная характеристика фильтра Винера (частотные характеристики показаны в сечении по горизонтальной оси). По горизонтали отложены номера гармоник. Первая гармоника соответствует периоду, равному горизонтальному размеру изображения.
. Оказывается, что инверсный фильтр дает плохое качество восстановления даже при ничтожном уровне шума. Пояснением этого эффекта служит рис. 5.3, где показаны: а – частотная характеристика фильтра (5.11), б – частотная характеристика инверсного фильтра и в – частотная характеристика фильтра Винера (частотные характеристики показаны в сечении по горизонтальной оси). По горизонтали отложены номера гармоник. Первая гармоника соответствует периоду, равному горизонтальному размеру изображения.
| |
а | |
|
|
б | в |
Рис. 5.3. Частотные характеристики, соответствующие влиянию и коррекции атмосферной турбулентности |
Другим примером линейных искажений является дефокусировка, которую в первом приближении можно описать импульсным откликом вида
 (5.12)
(5.12)
или частотной характеристикой
 , где
, где ![]() - функция Бесселя первого порядка.
- функция Бесселя первого порядка.
|
|
а | б |
|
|
в | г |
| |
д | |
Рис. 5.4. Восстановление дефокусированного изображения |

Действие этой системы и результаты коррекции приведены на рис. 5.4. Исходное изображение показано на рис. 5.4а, импульсный отклик (5.12) при ![]() - на рис. 5.4б, изображение, прошедшее через систему с этим импульсным откликом и искаженное некоррелированным шумом при отношении сигнал/шум - на рис. 5.4в.
- на рис. 5.4б, изображение, прошедшее через систему с этим импульсным откликом и искаженное некоррелированным шумом при отношении сигнал/шум - на рис. 5.4в.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
