

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Этот результат имеет наглядную геометрическую иллюстрацию (рис.7.6).
Рис. 7.6. Эпиполярные линии
Оптические центры камер ![]() и
и ![]() и наблюдаемая точка
и наблюдаемая точка ![]() образуют плоскость
образуют плоскость ![]() , которая пересекает плоскости изображения камер по прямым
, которая пересекает плоскости изображения камер по прямым ![]() и
и ![]() , где точка
, где точка ![]() является изображением оптического центра
является изображением оптического центра ![]() второй камеры в плоскости первой, а
второй камеры в плоскости первой, а ![]() - изображением центра
- изображением центра ![]() в плоскости второй. С другой стороны, если задана точка
в плоскости второй. С другой стороны, если задана точка ![]() , то точка
, то точка ![]() трехмерного пространства может лежать только на прямой, проходящей через
трехмерного пространства может лежать только на прямой, проходящей через ![]() и оптический центр
и оптический центр ![]() . Следовательно, ее проекция в плоскости изображения второй камеры должна лежать в плоскости
. Следовательно, ее проекция в плоскости изображения второй камеры должна лежать в плоскости ![]() , лежащей на этой прямой и оптическом центре
, лежащей на этой прямой и оптическом центре ![]() , а значит, на линии пересечения плоскости
, а значит, на линии пересечения плоскости ![]() и плоскости изображения второй камеры. Линии пересечения плоскости
и плоскости изображения второй камеры. Линии пересечения плоскости ![]() с плоскостями изображений камер называются эпиполярными линиями.
с плоскостями изображений камер называются эпиполярными линиями.
Практическая ценность полученного результата заключается в том, что его использование при поиске сопряженных точек позволяет существенно сократить размер зоны поиска, выполняя поиск не на всем изображении, а только вдоль эпиполярной линии, и тем самым снизить вероятность ложной идентификации фрагментов.
В отличие от рассмотренных ранее вопросов, сопоставление окрестностей сопряженных точек не поддается строгой формализации, поскольку в его основе лежит проблема идентификации по изображениям фрагментов реального трехмерного мира, которые с трудом поддаются адекватному формальному описанию. Возникающие при съемке и зависящие от ракурса проективные и яркостные искажения приводят к тому, что в изображениях одних и тех же участков сцены, снятых под разными ракурсами, могут появиться значительные отличия. Принципиально важно то, что эти отличия зависят не только от геометрии съемки, но и от геометрических и физических характеристик самой сцены. Расположение источника света по отношению к поверхности сцены влияет на распределение освещенности. Положение элементов сцены, их отражательные и рассеивающие свойства определяют количество энергии, попадающей в объективы камер, а следовательно, и локальные отличия в яркости сопряженных фрагментов изображений.
На рис.7.7 схематично показаны некоторые причины возникновения различий в изображениях. Пунктиром показаны индикатрисы излучения (рассеяния) в точках ![]() и
и ![]() наблюдаемой поверхности.
наблюдаемой поверхности.
Видно, что интенсивность излучения из точки ![]() в направлении левой камеры (с оптическим центром
в направлении левой камеры (с оптическим центром ![]() ) больше, чем в направлении правой камеры (с оптическим центром
) больше, чем в направлении правой камеры (с оптическим центром ![]() ). Точка
). Точка ![]() , наоборот, излучает в камеру
, наоборот, излучает в камеру ![]() слабее, чем в камеру
слабее, чем в камеру ![]() . Жирными столбиками показана интенсивность сигнала в изображениях этих точек в левой (
. Жирными столбиками показана интенсивность сигнала в изображениях этих точек в левой (![]() и
и ![]() ) и правой (
) и правой (![]() и
и ![]() ) камерах. Более того, точка
) камерах. Более того, точка ![]() вообще не видна в левой камере, поскольку ее загораживает участок поверхности
вообще не видна в левой камере, поскольку ее загораживает участок поверхности ![]() .
.
Величина различий зависит от разницы в ракурсах съемки. Как правило, чем больше эта разница (в частности, чем больше база), тем менее похожими становятся изображения. Поэтому все методы отождествления окрестностей сопряженных точек в большей или меньшей степени опираются не на формальный подход, а на здравый смысл.
Рис.7.7. Проективные и яркостные искажения
Одним из наиболее распространенных методов идентификации является корреляционный (изложение корреляционного метода дано в гл.5). При незначительных отличиях в ракурсах съемки и на достаточно гладких поверхностях от него можно ожидать хороших результатов. На рис.7.8 (а и б) приведена пара вертолетных снимков района озера Карымское (Камчатка), на которые нанесена прореженная сетка сопряженных точек, найденных корреляционным методом, а на рис.7.8.в показана поверхность, «натянутая» на трехмерные точки, координаты которых вычислены методом, изложенным ранее. Следует заметить, что построение поверхности, лежащей на заданном множестве трехмерных точек, представляет собой самостоятельную нетривиальную задачу, рассмотрение которой выходит за рамки темы, обсуждаемой в этой главе.
|
|
а) | б) |
| |
в) | |
Рис.7.8. Восстановление поверхности трехмерной сцены по стереопаре (приведено с любезного согласия авторов [7.9]) |
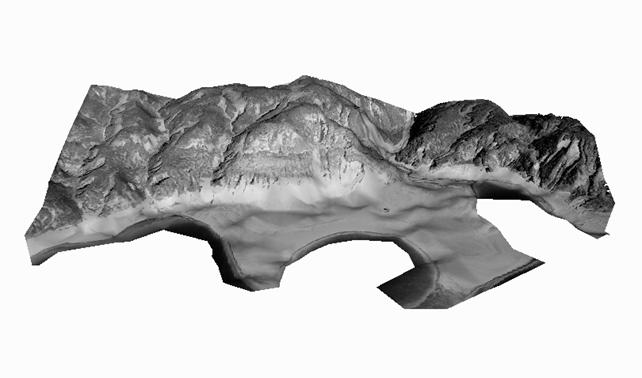
На снимках есть области, где сопряженные точки не удалось найти. Причин этому несколько. Часть сцены, видимая в правой части правого снимка, просто не попала в поле зрения левой камеры. Кроме этого, на снимках есть участки с мало изменяющейся яркостью. На таких участках корреляционный критерий не дает хорошо выраженного максимума, поэтому здесь координаты сопряженных точек определяются с большими погрешностями. Более того, здесь велика вероятность ложных отождествлений. Пространственное представление о таких участках получить без привлечения дополнительной информации невозможно. Если размеры этих участков малы, а по косвенным признакам можно предположить, что поверхность сцены изменяется плавно, можно интерполировать трехмерную структуру участков с их границ внутрь, как это сделано для участков ![]() и
и ![]() .Если их размеры велики, или сопряженные точки на границах не определены, восстановить трехмерную структуру участка не удается (участки
.Если их размеры велики, или сопряженные точки на границах не определены, восстановить трехмерную структуру участка не удается (участки ![]() и
и ![]() ).
).
Для того, чтобы восстановить мелкую структуру сцены, необходимо, чтобы сопряженные точки лежали достаточно часто. В приведенном примере для построения рельефа найдено более 7000 точек.
Сложность применения корреляционного метода заключается в том, чтобы подобрать такие размеры сопоставляемых фрагментов, при которых отличия в тождественных фрагментах еще невелики (для этого нужно уменьшать размеры), а оценка коэффициента корреляции остается достоверной (для этого размеры надо увеличивать). Но самым серьезным его недостатком является чувствительность к масштабным искажениям, присутствующим в отождествляемых фрагментах. Простейший способ уменьшения масштабных различий в сопряженных фрагментах состоит в использовании предварительной аффинной подстройки изображений. Этот способ, однако, оказывается недейственным при вариациях высот в сцене, сравнимых с расстоянием от сцены до системы камер, поскольку в этом случае появляются значительные локальные масштабные искажения.
Влияние яркостных искажений можно попытаться устранить, отказавшись от сопоставления фрагментов исходных изображений, и перейдя к сопоставлению фрагментов контурных изображений, где выделены края, т. е. переходы между областями с постоянной яркостью. На таких переходах, как известно, градиент яркости имеет максимум, а лапласиан обращается в нуль. Это обстоятельство и используется для выделения краев [7.10, п.17.4]. Существенным моментом является то, что контуры на изображениях непрерывных поверхностей должны располагаться в одинаковом порядке, как это видно на рис. 7.9 (изображения точек ![]() ,
, ![]() и
и ![]() ). Это ограничение позволяет в некоторой степени ослабить влияние масштабных искажений. Однако и здесь, как и в корреляционном методе, существует проблема ложного отождествления. Связана она, в частности, с тем, что видимая часть поверхности зависит от ракурса наблюдения (поэтому, например, на рис.7.9 изображение точки
). Это ограничение позволяет в некоторой степени ослабить влияние масштабных искажений. Однако и здесь, как и в корреляционном методе, существует проблема ложного отождествления. Связана она, в частности, с тем, что видимая часть поверхности зависит от ракурса наблюдения (поэтому, например, на рис.7.9 изображение точки ![]() в правой камере отсутствует), и на разных изображениях могут пропадать разные края. Кроме того, сама задача выделения краев только на первый взгляд кажется такой простой. В действительности неизбежное присутствие шумов в изображениях может привести к частичному исчезновению контуров или появлению ложных. Идея поиска сопряженных точек с помощью отождествления краев была особенно популярна у биологов и психологов, исследовавших механизмы зрения [7.11], но, как нам кажется, в таком идеальном виде практического применения не нашла.
в правой камере отсутствует), и на разных изображениях могут пропадать разные края. Кроме того, сама задача выделения краев только на первый взгляд кажется такой простой. В действительности неизбежное присутствие шумов в изображениях может привести к частичному исчезновению контуров или появлению ложных. Идея поиска сопряженных точек с помощью отождествления краев была особенно популярна у биологов и психологов, исследовавших механизмы зрения [7.11], но, как нам кажется, в таком идеальном виде практического применения не нашла.
Еще один подход к поиску сопряженных точек опирается на предварительный раздельный анализ изображений, позволяющий выделить на них некоторые характерные объекты или особенности. Так на аэроснимках городских территорий можно попытаться выделить перекрестки, отдельные дома или их фрагменты, деревья и т. п., а затем выполнить их отождествление между снимками.
По-видимому, наиболее удачных результатов можно ожидать от комбинированного использования всех этих методов и применения итеративной схемы, когда по найденным сопряженным точкам строится оценка поверхности, с учетом которой изображения подвергаются масштабной коррекции и выполняется поиск новых сопряженных точек.
Рис.7.9. Упорядочение сопряженных точек в случае непрерывных поверхностей
Вопросы
1. Какой смысл имеет знак при ![]() в выражении (7.1)?
в выражении (7.1)?
2. Какой вид примет выражение (7.3), если вектор трансляции будет задан в глобальной системе координат?
3. Обратимся к рис. 7.3. Какой вид будут иметь матрицы ![]() ,
, ![]() ,
, ![]() и вектор
и вектор ![]() в выражении (7.9) для ситуации, приведенной на рисунке?
в выражении (7.9) для ситуации, приведенной на рисунке?
4. Пусть в ситуации, изображенной на рис. 7.3, векторы  и
и  внутренних координат проекций точки
внутренних координат проекций точки ![]() в плоскостях изображений левой и правой камер известны. Получите оценки трехмерных координат точки
в плоскостях изображений левой и правой камер известны. Получите оценки трехмерных координат точки ![]() в системах координат правой и левой камер, пользуясь выражениями (7.11) и (7.12). Сравните полученный результат с (7.6) и (7.7). Объясните отличия.
в системах координат правой и левой камер, пользуясь выражениями (7.11) и (7.12). Сравните полученный результат с (7.6) и (7.7). Объясните отличия.
5. Почему в предыдущем вопросе векторы и имеют одинаковые ![]() - компоненты?
- компоненты?
6. Докажите справедливость соотношений (7.17).
7. Докажите справедливость соотношений (7.18).
8. На рис. 7.6 точки ![]() и
и ![]() являются изображениями оптических центров камер. Полагая, что матрицы
являются изображениями оптических центров камер. Полагая, что матрицы ![]() ,
, ![]() ,
, ![]() и вектор
и вектор ![]() известны, найдите координаты этих точек в плоскостях изображений соответствующих камер.
известны, найдите координаты этих точек в плоскостях изображений соответствующих камер.
9. Где будут находиться точки ![]() и
и ![]() , если камеры расположены, как показано на рис. 7.3?
, если камеры расположены, как показано на рис. 7.3?
Литература
1. Справочник по математике. - М.: Наука, 1973.
2. , Семендяев по математике. - М.: Наука, 1966.
3. Faugeras O. Tree Dimensional Computer Vision. - MIT Press, 1993.
4. Рао статистические методы и их применения. - М.: Наука, 1968.
5. Нелинейное оценивание параметров. - М.: Статистика, 1979.
6. Hu X., Ahuja N. Motion and Structure Estimation Using Long Sequence motion models.// Image and Vision ComputingV.11. - № 9.
7. Maybank S., Faugeras O. A. Theory of Self-calibration of a Moving Camera.// International Journal of Computer VisionV.8. - № 2.
8. П. Зрение роботов. - М.: Мир, 1989.
9. Popov S. A., Kirichuk V. S. Algorithm of Estimation of the Geometric Parameters of the System of Two Projection Cameras by the Method of the Least Squares (MLS). //Pattern Recognition and Image Analysis. – 1999. – N 2. - Р.304.
10. Цифровая обработка изображений. - М.: Мир. 1982.
11. Зрение: информационный подход к изучению представления и обработки зрительных образов. - М.: Радио и связь, 1987.
8. Математическая морфология и обработка изображений
Одним из сравнительно новых направлений в анализе изображений является применение аппарата математической морфологии. Начало математической морфологии, использующей представления теории множеств и интегральной геометрии, было положено работами французских исследователей Ж. Матерона [8.1] и Дж. Серра [8.2], занимавшихся проблемами минералогии и петрографии. Цель их исследований состояла в количественном описании физических и механических свойств материалов посредством анализа их геометрической структуры. За последующее время математическая морфология достигла состояния серьезного инструмента обработки изображений с основным применением в материаловедении, исследовании цитологических препаратов, анализе медицинских изображений.
Конечно, объема одной лекции совершенно недостаточно для сколь-нибудь последовательного изложения теоретических основ. Поэтому данная лекция имеет скорее иллюстративный характер. Здесь фрагментарно обсуждаются основные операции математической морфологии и их свойства, и приводятся результаты применения этих операций для обработки и анализа изображений (в основном двухградационных).
Следует заметить, что публикации, посвященные как теоретическим вопросам математической морфологии, так и ее приложениям в области обработки изображений, в русскоязычной литературе практически отсутствуют. При написании этого материала у нас возникали трудности с некоторыми русскоязычными названиями морфологических операций, адекватно передающими смысл названий, введенных в оригинальных англоязычных работах [8.2,8.3], на которых базируется изложение. Обозначения в основном совпадают с обозначениями, принятыми в [8.2,8.3].
Напомним некоторые основные понятия из теории множеств, которые потребуются в дальнейшем. Пусть ![]() - n-мерное пространство. Ниже обычно предполагается, что
- n-мерное пространство. Ниже обычно предполагается, что  или
или  , где
, где ![]() - n-мерное евклидово пространство, а
- n-мерное евклидово пространство, а ![]() - n-мерное дискретное пространство (n-мерная решетка). В применении к изображениям, как правило, рассматриваются двумерные пространства. Если
- n-мерное дискретное пространство (n-мерная решетка). В применении к изображениям, как правило, рассматриваются двумерные пространства. Если ![]() и
и ![]() - множества в
- множества в ![]() , то объединением множеств
, то объединением множеств ![]() и
и ![]() называется множество
называется множество ![]() , (т. е. множество, состоящее из таких элементов
, (т. е. множество, состоящее из таких элементов ![]() , которые принадлежат
, которые принадлежат ![]() или
или ![]() ), а пересечением множеств
), а пересечением множеств ![]() и
и ![]() называется множество
называется множество ![]() . Множество
. Множество ![]() называется дополнением множества
называется дополнением множества ![]() . Разностью множеств
. Разностью множеств ![]() и
и ![]() называется множество
называется множество ![]() . Множество
. Множество ![]() называется пустым, если оно не содержит ни одного элемента. Обозначается такое множество как
называется пустым, если оно не содержит ни одного элемента. Обозначается такое множество как ![]() . Справедливы следующие соотношения:
. Справедливы следующие соотношения:
 ;
;
 ; (8.1)
; (8.1)
 .
.
Определим на ![]() индикаторную функцию множества
индикаторную функцию множества ![]() следующим образом:
следующим образом:
 .
.
Определим также меру множества ![]() :
:
 - для непрерывного пространства
- для непрерывного пространства ![]() и
и
 - для дискретного пространства
- для дискретного пространства ![]() .
.
Для изображений эти определения означают, что мерой множества ![]() является его площадь в непрерывном случае и количество узлов решетки, входящих в множество – в дискретном.
является его площадь в непрерывном случае и количество узлов решетки, входящих в множество – в дискретном.
Операции математической морфологии
Двухградационное изображение можно рассматривать как индикаторную функцию набора множеств в ![]() (как, например, индикаторную функцию множества
(как, например, индикаторную функцию множества  на рис.8.1). Для данного множества
на рис.8.1). Для данного множества ![]() можно зафиксировать некоторый элемент (не обязательно принадлежащий этому множеству), который назовем центром (или началом) множества
можно зафиксировать некоторый элемент (не обязательно принадлежащий этому множеству), который назовем центром (или началом) множества ![]() . Обозначим через
. Обозначим через ![]() множество
множество ![]() , центр которого помещен в точку
, центр которого помещен в точку ![]() . Одним из основных понятий математической морфологии является понятие структурного элемента. Структурный элемент
. Одним из основных понятий математической морфологии является понятие структурного элемента. Структурный элемент ![]() - это множество, состоящее из двух непересекающихся подмножеств
- это множество, состоящее из двух непересекающихся подмножеств ![]() и
и ![]() , для которых определено общее начало.
, для которых определено общее начало.
|
Рис.8.1. Двухградационное изображение |
HM-преобразование
Согласно [8.2], базовым преобразованием, позволяющим строить набор различных операций математической морфологии, является преобразование Hit or Miss. Нам не удалось найти адекватного перевода этому названию, поэтому далее будем пользоваться названием “HM-преобразование”. Для данного множества  и данного структурного элемента
и данного структурного элемента ![]() результат HM-преобразования определяется как
результат HM-преобразования определяется как
![]() . (8.2)
. (8.2)
(Здесь через ![]() обозначено дополнение множества
обозначено дополнение множества ![]() .)
.)
Нетрудно видеть (рис.8. 2), что в результате HM-преобразования на исходном изображении выделяются элементы, окрестность которых совпадает со структурным элементом (заметим, что форма окрестности определяется формой структурного элемента). Условие (8.2) выполняется для элементов, лежащих на нижней границе ![]() (например, 1- 4 позиции структурного элемента). В позиции 5
(например, 1- 4 позиции структурного элемента). В позиции 5  , но
, но  , в позиции 6 , наоборот,
, в позиции 6 , наоборот, ![]() , но
, но ![]() , а в позиции 7 не выполняются оба условия.
, а в позиции 7 не выполняются оба условия.
Применяя HM-преобразование с различными структурными элементами можно выделять специфические геометрические особенности изображений.
|
Рис.8.2. HM-преобразование |
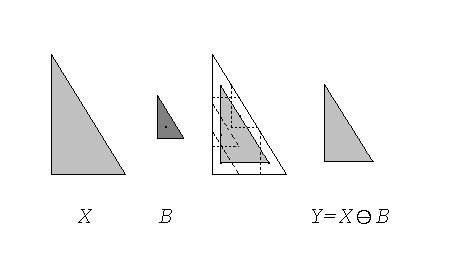
Эрозия
Частным случаем HM-преобразования является операция эрозии (erosion). Пусть в структурном элементе ![]() подмножество
подмножество ![]() - пусто (
- пусто (![]() ). При этом условие
). При этом условие ![]() всегда выполняется, и в множество
всегда выполняется, и в множество ![]() включаются только те элементы исходного множества
включаются только те элементы исходного множества ![]() , для которых выполняется условие
, для которых выполняется условие ![]() :
:
![]() . (8.3)
. (8.3)
Иначе говоря, если ![]() , а
, а ![]() , то в множество
, то в множество ![]() включаются такие элементы, для которых выполняется условие
включаются такие элементы, для которых выполняется условие  (рис.8.3).
(рис.8.3).
|
Рис.8.3. Эрозия |
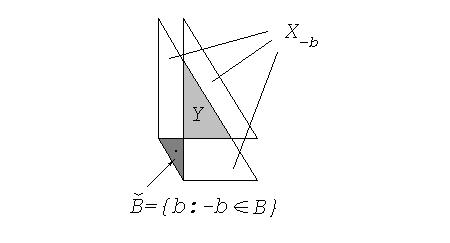
С другой стороны, если ![]() пробегает все возможные положения в
пробегает все возможные положения в ![]() , условие выполняется тогда и только тогда, когда
, условие выполняется тогда и только тогда, когда ![]() принадлежит смещенному множеству
принадлежит смещенному множеству ![]() (рис.8.4). Поэтому другое, эквивалентное, представление операции эрозии имеет вид
(рис.8.4). Поэтому другое, эквивалентное, представление операции эрозии имеет вид
![]() , (8.3’)
, (8.3’)
где ![]() - множество, симметричное
- множество, симметричное ![]() относительно его начала. Это представление может оказаться полезным при численной реализации операции эрозии.
относительно его начала. Это представление может оказаться полезным при численной реализации операции эрозии.
|
Рис.8.4. Эрозия как пересечение смещенных множеств |
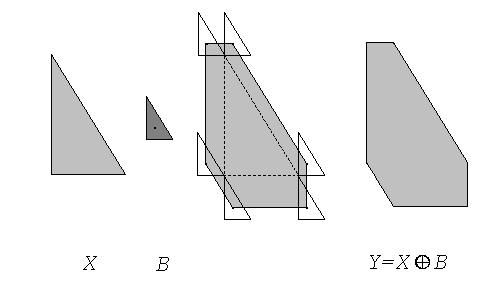
Дилатация
Операцией, двойственной к эрозии, является дилатация (dilation), которая определяется следующим образом (рис.8.5):
![]() . (8.4)
. (8.4)
|
Рис.8.5 Дилатация |
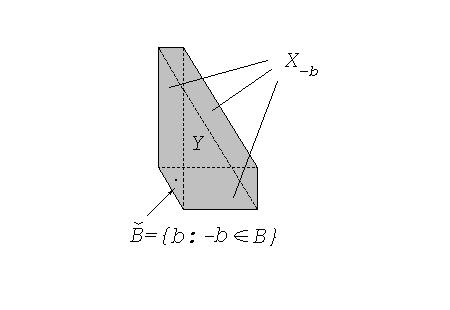
Другое представление дилатации имеет вид
![]() , (8.4’)
, (8.4’)
как это показано на рис.8.6.
|
Рис.8.6. Дилатация как объединение смещенных множеств |
Если рассматривать множество ![]() как объект, а
как объект, а ![]() как фон в изображении, то дилатацию объекта можно интерпретировать как эрозию фона:
как фон в изображении, то дилатацию объекта можно интерпретировать как эрозию фона:
![]() . (8.5)
. (8.5)
Действительно,
![]() .
.
Алгебраические свойства дилатации и эрозии
Приведем здесь без доказательства ряд полезных свойств рассмотренных операций.
a) Дистрибутивность:
дилатация дистрибутивна относительно объединения
![]() , (8.6)
, (8.6)
а эрозия - относительно пересечения множеств
![]() . (8.6’)
. (8.6’)
Свойство дистрибутивности с учетом соотношения (8.5) позволяет выполнять операции над ![]() по фрагментам, комбинируя затем результаты посредством объединения или пересечения.
по фрагментам, комбинируя затем результаты посредством объединения или пересечения.
б) Итеративность:
![]() ; (8.7)
; (8.7)
![]() . (8.7’)
. (8.7’)
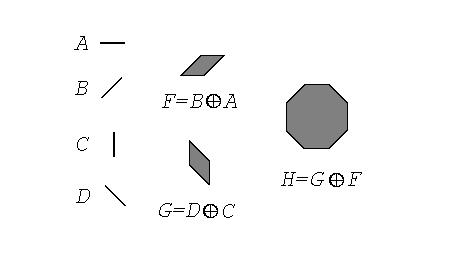
Это чрезвычайно важное свойство, поскольку оно позволяет разлагать сложные структурные элементы в композицию более простых (рис.8.7). Соответственно, операции со сложными элементами могут быть заменены последовательностью операций с более простыми. Так, эрозию некоего множества ![]() посредством структурного элемента
посредством структурного элемента ![]() , приведенного на рис.8.7, можно заменить четырьмя последовательными эрозиями со структурными элементами
, приведенного на рис.8.7, можно заменить четырьмя последовательными эрозиями со структурными элементами ![]() .
.
|
Рис.8.7. Декомпозиция структурных элементов |
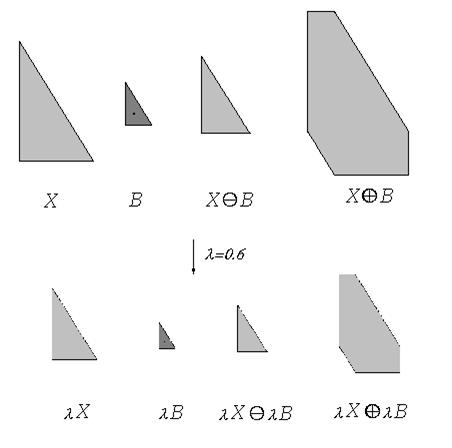
в) Инвариантность к изменению масштаба (рис.8.8):
|
Рис.8.8. Инвариантность эрозии и дилатации к масштабным преобразованиям |
![]() ; (8.8)
; (8.8)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
