

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 , (6.11)
, (6.11)
где ![]() - функция окна, не слишком отличающаяся от 1 в области частот
- функция окна, не слишком отличающаяся от 1 в области частот ![]() и достаточно быстро убывающая до нуля при
и достаточно быстро убывающая до нуля при ![]() . В этом случае импульсный отклик (6.10) принимает вид
. В этом случае импульсный отклик (6.10) принимает вид
 . (6.12а)
. (6.12а)
Различные функции окна и обсуждение свойств фильтров, построенных на их основе, можно найти в [6.3]. В частности, импульсный отклик фильтра, построенного с использованием функции окна
 , (6.12б)
, (6.12б)
как нетрудно показать, имеет вид
![]() , причем
, причем ![]() .
.
При переходе к дискретному представлению, при условии, что количество отсчетов в проекциях равно  , а шаг дискретизации равен
, а шаг дискретизации равен ![]() ,
,
 . (6.13)
. (6.13)
График этого фильтра для  приведен на рис. 6.5.
приведен на рис. 6.5.
|
Рис. 6.5. Импульсный отклик фильтра (6.13) |
Восстановление томограммы методом обратного проецирования и двумерной фильтрации
Рассмотрим двумерную функцию, полученную обратным проецированием нефильтрованных проекций
 .
.
Поскольку ![]() , то
, то
или, учитывая, что, согласно теореме о центральном сечении 
 .
.
Переходя в частотной области из полярной системы координат в декартову посредством преобразования ![]() ,
, ![]() , окончательно получим
, окончательно получим
 . (6.14)
. (6.14)
Отсюда следует, что спектр Фурье функции ![]() , полученной обратным проецированием нефильтрованных проекций, отличается от спектра искомой функции
, полученной обратным проецированием нефильтрованных проекций, отличается от спектра искомой функции ![]() множителем
множителем  . Поэтому, вводя функцию
. Поэтому, вводя функцию
![]() , (6.15)
, (6.15)
можно написать, что
![]() .
.
Это дает еще один алгоритм восстановления, состоящий в двумерной фильтрации результата обратного проецирования исходных проекций. Здесь следует иметь в виду, что выражение (6.15), так же как и (6.10), не может быть применено напрямую для вычисления импульсного отклика двумерного фильтра в силу расходимости интеграла. Однако, если спектр ![]() ограничен, импульсный отклик
ограничен, импульсный отклик ![]() восстанавливающего фильтра может быть, как и ранее, модифицирован с помощью соответствующей функции окна
восстанавливающего фильтра может быть, как и ранее, модифицирован с помощью соответствующей функции окна ![]() :
:
![]() .
.
Восстановление томограммы по проекциям, полученным в веерном пучке
При использовании рентгеновского излучения получить параллельный пучок лучей можно двумя способами. Первый - поместить точечный источник излучения достаточно далеко от исследуемого объекта, второй – использовать много хорошо коллимированных источников. И тот и другой способы приводят к большим энергетическим потерям. Гораздо выгоднее использовать веерный пучок, как это показано на рис. 6.6
|
Рис. 6.6. |
Рассуждения, аналогичные приведенным выше, позволяют вывести формулу реконструкции ![]() и для этого случая. Заметим, однако, что, выбирая соответствующие лучи из разных пучков, можно построить наборы параллельных лучей, пересекающих объект в различных направлениях. Так, на рис. 6.6 показаны два пучка лучей, в которых можно найти пары параллельных лучей. Две таких пары обозначены буквами a и b. Тогда мы снова приходим к более простому алгоритму реконструкции по проекциям, полученным в параллельных пучках. Следует только учесть, что теперь длина пути от источника до приемника в разных лучах различна, и, поскольку излучение ослабевает обратно пропорционально квадрату расстояния, необходимо провести предварительную нормировку проекций. Алгоритм реконструкции по проекциям, полученным в веерных пучках, основанный на перепаковке проекционных данных, можно найти в [6.3].
и для этого случая. Заметим, однако, что, выбирая соответствующие лучи из разных пучков, можно построить наборы параллельных лучей, пересекающих объект в различных направлениях. Так, на рис. 6.6 показаны два пучка лучей, в которых можно найти пары параллельных лучей. Две таких пары обозначены буквами a и b. Тогда мы снова приходим к более простому алгоритму реконструкции по проекциям, полученным в параллельных пучках. Следует только учесть, что теперь длина пути от источника до приемника в разных лучах различна, и, поскольку излучение ослабевает обратно пропорционально квадрату расстояния, необходимо провести предварительную нормировку проекций. Алгоритм реконструкции по проекциям, полученным в веерных пучках, основанный на перепаковке проекционных данных, можно найти в [6.3].
Влияние шума в проекционных данных на результаты восстановления
Вернемся снова к решению томографической задачи, полученному методом свертки и обратного проецирования, и предположим, что проекционные данные содержат аддитивную стационарную случайную компоненту ![]() с нулевым средним значением. В этом случае результатом восстановления будет функция
с нулевым средним значением. В этом случае результатом восстановления будет функция
 .
.
Дисперсия ошибки восстановления, обусловленной наличием случайной составляющей, по определению есть
![]() ,
,
где 
 .
.
Предполагая, что ![]() и
и ![]() некоррелированы, получим
некоррелированы, получим
где ![]() - автоковариационная функция шума.
- автоковариационная функция шума.
Обычно шумы в разных проекциях не коррелированы между собой, поэтому, с учетом стационарности шума,
![]() .
.
Поэтому
 .
.
Представляя автоковариационную функцию шума через ее спектр мощности
 ,
,
а ![]() в виде (6.12), и принимая во внимание (1.7), после ряда преобразований получим
в виде (6.12), и принимая во внимание (1.7), после ряда преобразований получим
 . (6.16)
. (6.16)
В частности, для шума с равномерным в интервале  спектром мощности и дисперсией
спектром мощности и дисперсией ![]()
 .
.
Если функция окна выбрана в виде (6.12б) причем ![]() , то
, то
![]() , (6.17)
, (6.17)
т. е. дисперсия ошибки восстановления томограммы растет быстрее, чем увеличивается ширина окна ![]() . Поэтому выбор функции окна оказывает существенное влияние на результат восстановления томограммы, что иллюстрируют рис. 6.7, 6.8.
. Поэтому выбор функции окна оказывает существенное влияние на результат восстановления томограммы, что иллюстрируют рис. 6.7, 6.8.
|
|
а | б |
| |
Рис. 6.7. Фантом (а), его проекции (б) и результат реконструкции методом свертки и обратного проецирования |
 в
вНа рис. 6.7а показано изображение, ставшее стандартным при изучении алгоритмов томографической реконструкции по плоским проекциям (так называемый фантом Шеппа-Логана), размером 256![]() 256 элементов. На рис. 6.7б показан набор из 180 параллельных проекций, длина которых совпадает с длиной диагонали исходного изображения. На рис. 6.7в показан фантом, восстановленный методом свертки и обратного проецирования с использованием окна (6.12б), причем частота
256 элементов. На рис. 6.7б показан набор из 180 параллельных проекций, длина которых совпадает с длиной диагонали исходного изображения. На рис. 6.7в показан фантом, восстановленный методом свертки и обратного проецирования с использованием окна (6.12б), причем частота ![]() соответствует половине частоты дискретизации проекций. Следует отметить, что здесь в виде муара достаточно заметно проявляется недостаток такого окна, обусловленный взаимодействием колебаний импульсного отклика (6.13) с резкими перепадами сигнала в проекциях. На рис. 6.8а приведены зашумленные некоррелированным шумом проекционные данные. Уровень шума достаточно мал, его среднеквадратичное значение
соответствует половине частоты дискретизации проекций. Следует отметить, что здесь в виде муара достаточно заметно проявляется недостаток такого окна, обусловленный взаимодействием колебаний импульсного отклика (6.13) с резкими перепадами сигнала в проекциях. На рис. 6.8а приведены зашумленные некоррелированным шумом проекционные данные. Уровень шума достаточно мал, его среднеквадратичное значение ![]() составляет 0.01
составляет 0.01![]() , где
, где ![]() - разница между максимальным и минимальным значениями сигнала в проекциях. Тем не менее в восстановленном прежним способом изображении (рис. 6.8б) случайная компонента достаточно хорошо заметна. Уменьшение ширины окна вдвое приводит к снижению уровня шума (рис. 6.8в), но несколько снижает четкость резких перепадов яркости.
- разница между максимальным и минимальным значениями сигнала в проекциях. Тем не менее в восстановленном прежним способом изображении (рис. 6.8б) случайная компонента достаточно хорошо заметна. Уменьшение ширины окна вдвое приводит к снижению уровня шума (рис. 6.8в), но несколько снижает четкость резких перепадов яркости.
|
|
а | б |
|
|
в | г |
Рис. 6.8. Реконструкция методом свертки и обратного проецирования по зашумленным проекционным данным |
На рис. 6.8г приведен результат восстановления с использованием окна Хенна, имеющего вид
 .
.
Использование такого окна тоже приводит к снижению резкости перепадов, однако шум подавляется лучше, кроме того, при этом не появляется колебаний на перепадах, которые хорошо заметны на рис. 6.8в.
Вопросы
1. Что понимается под изображением внутренней структуры объекта?
2. Как формируется набор проекций для описания внутренней структуры объекта?
3. Что такое радоновский образ?
4. Как связаны Фурье-спектры проекций с Фурье-спектром объекта?
5. В чем состоит процедура обратного проецирования?
6. Как выбираются интервалы дискретизации при получении проекций?
7. Как влияет шум в проекциях результат восстановления томограммы?
Литература
, Детлаф по физике. М. “Наука”, 1990 Троицкий теория томографии. М., “Радио и связь”, 1989 Восстановление изображений по проекциям. М., “Мир”, 19837. Восстановление трехмерных поверхностей по стереопаре
В обычном изображении трехмерного пространства информация о расстоянии до различных элементов сцены проявляется только в виде косвенных признаков: через относительные размеры объектов, затенение одних объектов другими, различной освещенностью и т. д. Один из способов получения информации о глубине состоит в регистрации нескольких изображений сцены под различными ракурсами. В этом случае точки сцены дают изображения, относительное положение которых зависит от расстояния до точки наблюдения. Оказывается, сопоставляя эти изображения, в ряде случаев можно реконструировать трехмерную структуру сцены. Основы теории определения положения объектов в пространстве по их перспективным изображениям были положены еще в средние века, а в XVIII веке перспективные рисунки стали использоваться в топографических целях. Появление фотографии положило начало фотограмметрии – науке об определении формы, размеров и пространственного положения различных объектов посредством измерения их фотографических изображений. В начале XX века был изобретен стереокомпаратор – прибор для измерения пространственного положения объектов по паре перекрывающихся фотографических изображений. Интерес к методам восстановления трехмерной структуры сцен по их плоским изображениям возобновился в середине XX столетия в связи с исследованиями в области искусственного интеллекта, а практическая потребность в робототехнических устройствах, способных ориентироваться в трехмерном пространстве, постоянно поддерживает этот интерес в последние десятилетия.
В этой главе мы рассмотрим процесс формирования изображений, соотношения между координатами точек сцены и их изображениями и методы оценивания параметров системы регистрации и трехмерной структуры сцены.
Модель регистрирующей камеры
Строго говоря, различные точки пространства предметов отображаются оптической системой камеры в пространстве изображений на различных расстояниях от фокальной плоскости. Однако, если расстояние между камерой и наблюдаемой сценой значительно превышает фокусное расстояние оптической системы, можно считать, что изображение строится в ее фокальной плоскости. В этом случае можно воспользоваться проективной моделью камеры, в которой изображение трехмерного объекта получается проектированием его в фокальную плоскость (плоскость изображения) через единственную точку, называемую оптическим центром. Прямая линия, перпендикулярная плоскости изображения и проходящая через эту точку, называется оптической осью камеры, а точка пересечения оптической оси с плоскостью изображения – главной точкой.
Определим в трехмерном пространстве ортогональную правую систему координат OXYZ, начало которой совпадает с оптическим центром, ось OZ - с оптической осью камеры. Такая система называется стандартной системой координат камеры. Пусть плоскость изображения находится на расстоянии ![]() от оптического центра. В этой плоскости зададим систему координат oxy с началом в главной точке и осями ox и oy, параллельными осям OX и OY соответственно (рис. 7.1). Легко убедиться, что в стандартной системе координат проекцией точки трехмерного пространства
от оптического центра. В этой плоскости зададим систему координат oxy с началом в главной точке и осями ox и oy, параллельными осям OX и OY соответственно (рис. 7.1). Легко убедиться, что в стандартной системе координат проекцией точки трехмерного пространства ![]() с координатами
с координатами ![]() является точка
является точка ![]() в плоскости изображения с координатами
в плоскости изображения с координатами ![]() , причем
, причем
 ,
,  .
.
Рис.7.1. Система координат проективной камеры
Для полного описания камеры следует учесть, что для регистрации изображения в плоскости изображения камеры помещается какой-либо фотоприемник. В фотокамере это фотопластинка или фотопленка, в видеокамеру это видикон или фотоприемная полупроводниковая матрица, в некоторых специальных камерах – электромеханический сканер. В общем случае измерение координат в фотоприемнике осуществляется в единицах, отличных от единиц, задающих координаты в стандартной системе. Например, если используется матричный фотоприемник, его естественными координатами являются номер строки и номер столбца фотоприемной ячейки. Поэтому для полного описания камеры необходимо выразить координаты точки ![]() в естественных единицах фотоприемника. В достаточно общем для любых фотоприемников виде (рис. 7.1) это может выглядеть как
в естественных единицах фотоприемника. В достаточно общем для любых фотоприемников виде (рис. 7.1) это может выглядеть как
 ,
,  ,
,
где  - координаты главной точки относительно начала координат фотоприемника (в естественных координатах фотоприемника);
- координаты главной точки относительно начала координат фотоприемника (в естественных координатах фотоприемника);
![]() и
и ![]() - масштабы вдоль осей ox и oy (например, расстояния между ячейками матричного фотоприемника вдоль строк и столбцов).
- масштабы вдоль осей ox и oy (например, расстояния между ячейками матричного фотоприемника вдоль строк и столбцов).
В новой системе координаты проекции точки ![]() примут вид
примут вид
![]() ,
, ![]() . (7.1)
. (7.1)
Для последующего изложения введем трехмерный вектор  , соответствующий точке
, соответствующий точке ![]() , и двумерный вектор
, и двумерный вектор ![]() , соответствующий точке
, соответствующий точке ![]() . Определим также вектор однородных внутренних координат камеры
. Определим также вектор однородных внутренних координат камеры ![]() . Используя эти обозначения, соотношения (7.1) можно представить в компактной векторно-матричной записи:
. Используя эти обозначения, соотношения (7.1) можно представить в компактной векторно-матричной записи:
 , (7.2)
, (7.2)
где  - матрица, известная под названием матрицы внутренних параметров камеры, поскольку она содержит только параметры оптической системы и фотоприемника камеры.
- матрица, известная под названием матрицы внутренних параметров камеры, поскольку она содержит только параметры оптической системы и фотоприемника камеры.
Связь между различными системами координат
В общем случае трехмерные координаты точки могут быть заданы в системе, не совпадающей со стандартной системой координат камеры (назовем ее глобальной). Пусть OXYZ – глобальная система координат, а  - стандартная система координат камеры. Переход от системы OXYZ к системе можно осуществить поворотом координатных осей к системе
- стандартная система координат камеры. Переход от системы OXYZ к системе можно осуществить поворотом координатных осей к системе ![]() и последующим смещением начала координат. Тогда связь между координатами точки
и последующим смещением начала координат. Тогда связь между координатами точки ![]() в глобальной и стандартной системе может быть представлена как
в глобальной и стандартной системе может быть представлена как
 , (7.3)
, (7.3)
где ![]() и
и ![]() - векторы пространственных координат точки
- векторы пространственных координат точки ![]() в глобальной и стандартной системах, соответственно;
в глобальной и стандартной системах, соответственно; ![]() - матрица размерности
- матрица размерности ![]() , описывающая поворот стандартной системы координат относительно глобальной; компонентами матрицы являются направляющие косинусы осей глобальной системы в стандартной системе координат ;
, описывающая поворот стандартной системы координат относительно глобальной; компонентами матрицы являются направляющие косинусы осей глобальной системы в стандартной системе координат ; ![]() - трехмерный вектор смещения начала координат глобальной системы относительно начала координат стандартной.
- трехмерный вектор смещения начала координат глобальной системы относительно начала координат стандартной.
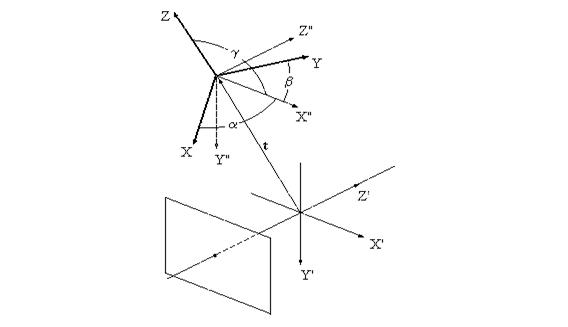
Рис.7.2. Переход от глобальной системы координат к стандартной системе координат камеры.
На рис. 7.2. схематически показано преобразование координат. Здесь ![]() - углы, образованные осью
- углы, образованные осью ![]() с осями
с осями ![]() ,
, ![]() и
и ![]() соответственно. Элементы первой строки матрицы
соответственно. Элементы первой строки матрицы ![]() [7.1, п.14.10] содержат косинусы этих углов:
[7.1, п.14.10] содержат косинусы этих углов:  ,
,  ,
,  . Аналогично, вторая и третья строки матрицы содержат косинусы углов, образованных соответственно осями
. Аналогично, вторая и третья строки матрицы содержат косинусы углов, образованных соответственно осями ![]() и
и ![]() с осями глобальной системы координат.
с осями глобальной системы координат.
Особенность матрицы ![]() состоит в том, что она зависит только от трех параметров, поскольку все девять ее элементов связаны шестью уравнениями связи и, следовательно, не являются независимыми. Обозначив строки матрицы в виде векторов
состоит в том, что она зависит только от трех параметров, поскольку все девять ее элементов связаны шестью уравнениями связи и, следовательно, не являются независимыми. Обозначив строки матрицы в виде векторов ![]() ,
, ![]() и
и ![]() , эти уравнения можно представить в виде:
, эти уравнения можно представить в виде:
 ,
,  ,
,  ,
,  ,
,  ,
,  , (7.4)
, (7.4)
Уравнения (7.4) являются условиями взаимной ортогональности векторов ![]() . Матрица, построенная из таких векторов, называется ортогональной. Для ортогональной матрицы справедливо соотношение
. Матрица, построенная из таких векторов, называется ортогональной. Для ортогональной матрицы справедливо соотношение ![]() . Условие взаимной ортогональности векторов
. Условие взаимной ортогональности векторов ![]() в трехмерном пространстве можно выразить в другой удобной форме, которая понадобится нам позже:
в трехмерном пространстве можно выразить в другой удобной форме, которая понадобится нам позже:
 ,
,  ,
,  . (7.5)
. (7.5)
Верхний знак соответствует случаю, когда матрица ![]() представляет преобразование, не изменяющее взаимной ориентации осей системы, а нижний – преобразование, изменяющее правую систему координат на левую и наоборот.
представляет преобразование, не изменяющее взаимной ориентации осей системы, а нижний – преобразование, изменяющее правую систему координат на левую и наоборот.
Смысл вектора ![]() ясен непосредственно из рисунка.
ясен непосредственно из рисунка.
Стереоскопическая система
Рассмотрим ситуацию, когда две камеры, находящиеся в разных точках, регистрируют одну и ту же сцену. Пара изображений, получаемых при этом, называется стереопарой. Обратимся сначала к простейшему случаю. Пусть одинаковые камеры расположены так, что их оптические оси параллельны, а прямая, проходящая через оптические центры, перпендикулярна оптическим осям (эта прямая называется базовой линией, а ее отрезок, заключенный между оптическими центрами – базой). Положим длину базы равной ![]() . Выберем такую глобальную систему координат, начало которой
. Выберем такую глобальную систему координат, начало которой ![]() расположено на базовой линии посередине между оптическими центрами камер, ось
расположено на базовой линии посередине между оптическими центрами камер, ось ![]() параллельна оптическим осям, а ось
параллельна оптическим осям, а ось ![]() направлена вдоль базовой линии (рис. 7.3). Пусть начала координат в плоскостях изображений камер совпадают с главными точками (
направлена вдоль базовой линии (рис. 7.3). Пусть начала координат в плоскостях изображений камер совпадают с главными точками ( ), а единицы измерения координат в глобальной системе и в плоскостях изображения камер одинаковы (
), а единицы измерения координат в глобальной системе и в плоскостях изображения камер одинаковы (![]() ).
).
Выберем точку ![]() с глобальными координатами
с глобальными координатами ![]() . Координаты ее проекции в плоскости изображения первой (левой) камеры обозначим через
. Координаты ее проекции в плоскости изображения первой (левой) камеры обозначим через ![]() , а в плоскости изображения второй (правой) камеры – через
, а в плоскости изображения второй (правой) камеры – через ![]() . (Проекции одной и той же точки
. (Проекции одной и той же точки ![]() в плоскостях изображений разных камер называются сопряженными точками.) Нетрудно проверить, что
в плоскостях изображений разных камер называются сопряженными точками.) Нетрудно проверить, что
![]() ,
, ![]() ,
,  .
.
Заметим, что в направлении, перпендикулярном направлению базовой линии, координаты сопряженных точек (![]() -координаты) совпадают. Это обстоятельство имеет большое значение при автоматизированном поиске сопряженных точек на стереопаре, позволяя существенно сократить размеры зоны поиска. Из первых двух соотношений следует, что
-координаты) совпадают. Это обстоятельство имеет большое значение при автоматизированном поиске сопряженных точек на стереопаре, позволяя существенно сократить размеры зоны поиска. Из первых двух соотношений следует, что
![]() . (7.6)
. (7.6)
Рис.7.3. Простейшая стереоскопическая система
Это означает, что, зная геометрию съемки и выполнив измерения координат проекций одной и той же точки в плоскостях изображения камер, можно вычислить глубину (координату ![]() ) этой точки. Более того, полученные соотношения позволяют вычислить полностью трехмерные координаты точки:
) этой точки. Более того, полученные соотношения позволяют вычислить полностью трехмерные координаты точки:
 ,
,  . (7.7)
. (7.7)
Разность ![]() называется диспарантностью. Из (7.6) и (7.7) следует, что ошибки в координатах проекций сильнее сказываются при малой диспарантности и, следовательно, расстояния до далеких объектов измеряются менее точно, чем до близких. С другой стороны, при фиксированной дальности диспарантность пропорциональна размеру базы, следовательно, точность измерений повышается с увеличением базы. Далее мы, однако, увидим, что увеличение базы может привести к ошибкам, которые не компенсируются увеличением точности измерений.
называется диспарантностью. Из (7.6) и (7.7) следует, что ошибки в координатах проекций сильнее сказываются при малой диспарантности и, следовательно, расстояния до далеких объектов измеряются менее точно, чем до близких. С другой стороны, при фиксированной дальности диспарантность пропорциональна размеру базы, следовательно, точность измерений повышается с увеличением базы. Далее мы, однако, увидим, что увеличение базы может привести к ошибкам, которые не компенсируются увеличением точности измерений.
Теперь рассмотрим общий случай, когда оптические оси камер не параллельны, и направление смещения оптического центра одной камеры относительно оптического центра другой произвольно (рис.7.4). Введем для каждой камеры свою стандартную систему координат, так как это было сделано в разделе 7.1. Пусть первой камере соответствует система координат  , а второй –
, а второй –  (рис. 7.4). Пусть вектор
(рис. 7.4). Пусть вектор ![]() характеризует координаты некоторой точки
характеризует координаты некоторой точки ![]() трехмерного пространства в системе первой камеры, а вектор
трехмерного пространства в системе первой камеры, а вектор ![]() - в системе второй. Переход от глобальной системы координат к стандартным системам первой и второй камер осуществляется с помощью преобразований
- в системе второй. Переход от глобальной системы координат к стандартным системам первой и второй камер осуществляется с помощью преобразований ![]() и
и ![]() соответственно. Учитывая это, легко показать, что связь между векторами
соответственно. Учитывая это, легко показать, что связь между векторами ![]() и
и ![]() задается соотношением
задается соотношением
 , (7.8)
, (7.8)
где  - ортогональная матрица, описывающая ориентацию системы координат второй камеры относительно первой, а
- ортогональная матрица, описывающая ориентацию системы координат второй камеры относительно первой, а ![]() - вектор трансляции, определяющий положение оптического центра второй камеры в системе координат первой. Матрицу
- вектор трансляции, определяющий положение оптического центра второй камеры в системе координат первой. Матрицу ![]() и вектор
и вектор ![]() принято называть внешними параметрами системы регистрации.
принято называть внешними параметрами системы регистрации.
Рис. 7.4. Система двух произвольно ориентированных камер
Используя (7.2) из (7.8) можно получить соотношение, связывающее координаты сопряженных точек (в координатах фотоприемника) :
 , (7.9)
, (7.9)
где![]() (см. (7.2))
(см. (7.2))
 ,
,  . (7.10)
. (7.10)
(Предполагается, что регистрация может выполняться двумя различными камерами, внутренние параметры которых определяются матрицами ![]() и
и ![]() ).
).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
