

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 5.4г демонстрирует восстановление посредством фильтра Винера. Здесь обнаруживается уже упоминавшееся ранее отличие простой и циклической дискретных сверток. Циклическая свертка не учитывает краевых эффектов, которые возникают при периодическом повторении изображений. При дискретном преобразовании Фурье разрывы на краях изображения приводят к появлению высокочастотных гармоник, отсутствующих в реальном, неограниченном изображении. Действуя на эти паразитные гармоники, фильтр, построенный на основе циклического продолжения, приводит к появлению на краях восстановленного изображения колебаний, хорошо видных на рис. 5.4г. Одним из способов устранения разрывов на краях является предварительное умножение изображения, подвергаемого фильтрации, на так называемую функцию окна, спадающую на краях до нуля. Это позволяет в значительной степени ослабить влияние краевых эффектов, хотя и вносит в восстановленное изображение дополнительные яркостные искажения. Некоторые функции окна рассмотрены в [1]. На рис. 5.4д показан результат восстановления изображения, приведенного на рис. 5.4в, после умножения его на функцию окна вида
 . (5.13)
. (5.13)
|
|
а | б |
| |
б | |
Рис. 5.5. Частотные характеристики, соответствующие влиянию и коррекции дефокусировки |
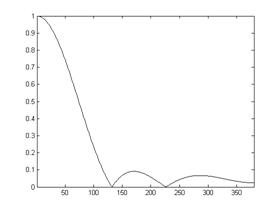
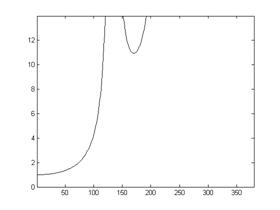
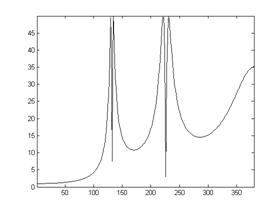
На рис. 5.5 приведены аналогичные рис. 5.3 частотные характеристики фильтров для случая искажений типа дефокусировки. На рис. 5.5в очень хорошо видно, как в фильтре Винера устраняется неустойчивость, обусловленная наличием нулей в частотной характеристике дефокусирующей системы.
Обнаружение объектов. Согласованный фильтр
Задача обнаружения объектов заключается в установлении наличия на изображении фрагмента, обладающего определенными, заранее известными, характеристиками. Один из подходов к решению этой задачи базируется на статистической теории принятия решений (например, [2]). Рассмотрим сначала простую задачу, которая состоит в следующем: необходимо решить, присутствует ли в точке изображения с координатами (![]() ) объект, если известно, что изображение в этой точке может быть представлено в виде
) объект, если известно, что изображение в этой точке может быть представлено в виде
 . (5.14)
. (5.14)
Если ![]() и
и ![]() - известные детерминированные величины, то способ решения этой задачи очевиден – необходимо выбрать некоторое пороговое значение
- известные детерминированные величины, то способ решения этой задачи очевиден – необходимо выбрать некоторое пороговое значение ![]() , и принимать решение о наличии объекта, если
, и принимать решение о наличии объекта, если ![]() , и об его отсутствии в противном случае. Такой подход всегда будет приводить к правильному решению задачи.
, и об его отсутствии в противном случае. Такой подход всегда будет приводить к правильному решению задачи.
Пусть теперь ![]() - по-прежнему известная детерминированная величина, а
- по-прежнему известная детерминированная величина, а ![]() - случайная величина с распределением, характеризуемым плотностью вероятности
- случайная величина с распределением, характеризуемым плотностью вероятности ![]() . При этом известно, что объект может появляться в рассматриваемой точке с вероятностью
. При этом известно, что объект может появляться в рассматриваемой точке с вероятностью ![]() . Теперь изображение в точке с координатами (
. Теперь изображение в точке с координатами (![]() ) тоже является случайной величиной, которая характеризуется распределением
) тоже является случайной величиной, которая характеризуется распределением ![]() , если объект отсутствует, и распределением
, если объект отсутствует, и распределением  при наличии объекта. Если наличие и отсутствие объекта равновероятны, то
при наличии объекта. Если наличие и отсутствие объекта равновероятны, то  . Соответствующие этому случаю распределения показаны на рис. 5.6 (
. Соответствующие этому случаю распределения показаны на рис. 5.6 (![]() - дисперсия
- дисперсия ![]() ).
).
|
Рис. 5.6. Распределение случайной величины |
В такой, вероятностной, постановке задаче выбор порога не является столь же очевидным, как в предыдущем случае. Теперь может существовать четыре различных исхода принятия решения, которые приведены в таблице 5.1. Исходы, отмеченные знаком “+”, соответствуют правильно принятому решению, а исходы со знаком “–“ – неверному решению.
Таблица 5.1
Объект\Решение | отсутствует (0) | присутствует (1) |
отсутствует (0) | + | - |
присутствует (1) | - | + |
Зная распределения ![]() и
и ![]() , можно вычислить вероятности всех исходов. Обозначим исходы парой чисел, в которой первое число указывает на наличие (1) или отсутствие (0) объекта, а второе – на принятое решение (0 – объект отсутствует, 1 – объект есть в изображении) Тогда при заданном пороговом значении порога
, можно вычислить вероятности всех исходов. Обозначим исходы парой чисел, в которой первое число указывает на наличие (1) или отсутствие (0) объекта, а второе – на принятое решение (0 – объект отсутствует, 1 – объект есть в изображении) Тогда при заданном пороговом значении порога ![]() вероятности исходов представляются в виде:
вероятности исходов представляются в виде:
 ,
,  ,
,  ,
,  .
.
Различные критерии выбора порогового значения при статистическом подходе базируются на соотношении вероятностей принятия правильных и ошибочных решений. Заметим, однако, что независимо от выбора критерия, соотношение вероятностей принятия правильных и ошибочных решений будет тем лучше, чем больше отношение расстояния между распределениями ![]() и
и ![]() к характерной ширине этих распределений, т. е. отношение сигнал/шум
к характерной ширине этих распределений, т. е. отношение сигнал/шум
С/Ш=![]() .
.
В рассмотренном случае решение принимается относительно единственной точки изображения при заданном отношении С/Ш, которое мы не можем изменить. Совместный анализ многих точек изображения позволяет этим отношением управлять.
Рассмотрим теперь задачу обнаружения объекта на дискретном изображении размером ![]() в следующей постановке. Пусть в качестве известных характеристик объекта задано его детерминированное изображение
в следующей постановке. Пусть в качестве известных характеристик объекта задано его детерминированное изображение ![]() , а анализируемое изображение может быть представлено в виде
, а анализируемое изображение может быть представлено в виде
![]() ,
,
где ![]() - случайный стационарный фон.
- случайный стационарный фон.
Пусть изображение объекта имеет размеры ![]() ,
, ![]() ,
, ![]() , и задача состоит в том, чтобы установить наличие или отсутствие объекта в заданном фрагменте изображения размером
, и задача состоит в том, чтобы установить наличие или отсутствие объекта в заданном фрагменте изображения размером ![]() .
.
Представим изображение объекта и текущий фрагмент анализируемого изображения в виде векторов размером ![]() путем упорядоченного выстраивания их, например, по столбцам (см. гл.3). Текущий фрагмент изображения при этом будет представлен как
путем упорядоченного выстраивания их, например, по столбцам (см. гл.3). Текущий фрагмент изображения при этом будет представлен как
![]() . (5.15)
. (5.15)
Вычислим взвешенную сумму элементов фрагмента ![]() , которую можно представить как скалярное произведение
, которую можно представить как скалярное произведение
![]() , (5.16)
, (5.16)
где ![]() - вектор размером
- вектор размером ![]() ,
,
причем элементы вектора ![]() выберем так, чтобы отношение С/Ш в
выберем так, чтобы отношение С/Ш в ![]() было максимальным. Это отношение имеет вид
было максимальным. Это отношение имеет вид
С/Ш=![]() , (5.17)
, (5.17)
где в числителе стоит квадрат амплитуды полезного сигнала, а в знаменателе – дисперсия случайной компоненты, которую можно представить как
 ,
,
где ![]() - ковариационная матрица шума
- ковариационная матрица шума ![]() .
.
Вектор ![]() , максимизирующий отношение С/Ш, получим, приравнивая нулю производную (5.17) по
, максимизирующий отношение С/Ш, получим, приравнивая нулю производную (5.17) по ![]() :
:
откуда следует, что
![]() .
.
Поскольку умножение вектора ![]() на скалярный множитель не влияет на отношение (5.17), окончательный его вид определим как
на скалярный множитель не влияет на отношение (5.17), окончательный его вид определим как
![]() . (5.18)
. (5.18)
При таком выборе вектора ![]() взвешенная сумма
взвешенная сумма ![]() принимает вид
принимает вид
![]() , (5.19)
, (5.19)
а отношение сигнал/шум –
С/Ш=![]() . (5.20)
. (5.20)
Решение о наличии или отсутствии объекта в заданном фрагменте изображения принимается на основе анализа распределения величины ![]() .
.
Если положение анализируемого фрагмента изображения заранее не фиксировано, то взвешенную сумму (5.16) необходимо вычислить для всех возможных положений объекта и сравнить полученные значения с порогом, устанавливаемым в соответствии с критерием, построенным на основе анализа распределения ![]() . Вычисление взвешенной суммы
. Вычисление взвешенной суммы ![]() фактически сводится к фильтрации изображения фильтром, имеющим импульсный отклик
фактически сводится к фильтрации изображения фильтром, имеющим импульсный отклик ![]() . Такой фильтр называется согласованным фильтром, а описанная процедура обнаружения объекта – согласованной фильтрацией.
. Такой фильтр называется согласованным фильтром, а описанная процедура обнаружения объекта – согласованной фильтрацией.
Наиболее простой вид имеет импульсный отклик согласованного фильтра для обнаружения объекта в некоррелированном шуме. В этом случае ковариационная матрица шума имеет вид
![]() ,
,
где ![]() - единичная матрица.
- единичная матрица.
Нетрудно увидеть, что импульсный отклик согласованного фильтра для такого случая имеет форму искомого объекта ![]() , а отношение сигнал/шум равно
, а отношение сигнал/шум равно ![]() . Этот случай иллюстрируется рисунком 5.7.
. Этот случай иллюстрируется рисунком 5.7.
|
|
а | б |
| |
в | |
Рис. 5.7. Согласованная фильтрация с некоррелированным шумом |

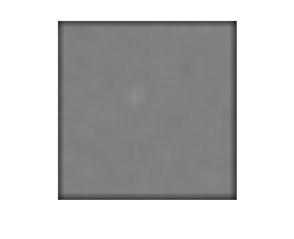
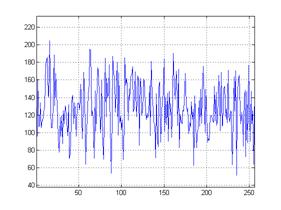
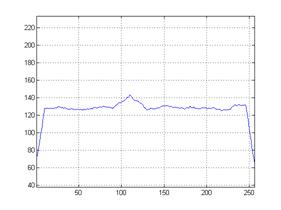
На рис. 5.7а показано идеальное изображение размером 256*256 пикселей, содержащее объект, представляющий собой квадрат со стороной 20 пикселей постоянной яркости, равной 16, на фоне с постоянной яркостью 128 (весь диапазон составляет 256 градаций яркости). На рис. 5.7б показано это же изображение, поврежденное аддитивным некоррелированным шумом с ![]() = 32, т. е исходное отношение сигнал/шум (5.17) здесь равно 1/4. Здесь объект практически не выделяется из шума. На рис. 5.7б показан результат согласованной фильтрации. Темная кайма по краям изображения обусловлена краевым эффектом дискретной свертки и поэтому при обнаружении края изображения шириной в половину ширины фильтра не анализируются. Здесь отношение сигнал/шум равно 100.
= 32, т. е исходное отношение сигнал/шум (5.17) здесь равно 1/4. Здесь объект практически не выделяется из шума. На рис. 5.7б показан результат согласованной фильтрации. Темная кайма по краям изображения обусловлена краевым эффектом дискретной свертки и поэтому при обнаружении края изображения шириной в половину ширины фильтра не анализируются. Здесь отношение сигнал/шум равно 100.
Эффект согласованной фильтрации лучше заметен при сравнении продольного сечения изображений вдоль строки, проходящей через центр объекта. На рис. 5.8а показано сечение идеального изображения, приведенного на рис. 5.7а, на рис. 5.8б – сечение изображения 5.7б, а на рис. 5.8в – сечение изображения 5.7в, полученного в результате согласованной фильтрации.
Следует подчеркнуть, что в отличие от оптимального фильтра, в выходном изображении которого восстанавливается исходная форма объекта, на выходе согласованного фильтра получается изображение, в котором форма объекта существенно отличается от исходной. Это хорошо видно при сравнении рис. 5.8а и 5.8в.
|
|
а | б |
| |
в | |
Рис. 5.8. Согласованная фильтрация. Продольные сечения изображений |

Ковариационная матрица шума по определению является симметричной неотрицательно определенной матрицей, которая допускает представление
 ,
,
где ![]() - матрица, построенная из собственных векторов ковариационной матрицы
- матрица, построенная из собственных векторов ковариационной матрицы ![]() , а
, а ![]() - диагональная матрица соответствующих собственных значений (неотрицательных). Если ковариационная матрица шума не вырождена, т. е.
- диагональная матрица соответствующих собственных значений (неотрицательных). Если ковариационная матрица шума не вырождена, т. е. ![]() не содержит нулевых диагональных элементов, то, в силу ортонормированности матрицы
не содержит нулевых диагональных элементов, то, в силу ортонормированности матрицы ![]() (
(![]() ), матрица
), матрица ![]() может быть представлена как
может быть представлена как
 ,
,  ,
,
где ![]() - диагональная матрица, содержащая величины, обратные корням квадратным из собственных значений. Соответственно, взвешенная сумма (5.19) принимает вид
- диагональная матрица, содержащая величины, обратные корням квадратным из собственных значений. Соответственно, взвешенная сумма (5.19) принимает вид
 . (5.21)
. (5.21)
Рассмотрим действие оператора ![]() на шумовую составляющую изображения
на шумовую составляющую изображения ![]() . Преобразованный шум есть
. Преобразованный шум есть
 ,
,
а его ковариационная матрица –

Т. о., оператор ![]() преобразует шум с ковариационной матрицей
преобразует шум с ковариационной матрицей ![]() в некоррелированный (“белый”) шум с единичной дисперсией. Следовательно, действие согласованного фильтра можно разбить на два этапа. На первом этапе производится “отбеливание” шума (и соответствующее преобразование входного изображения), а на втором – согласованная фильтрация полученного изображения фильтром, настроенным на преобразованное изображение объекта
в некоррелированный (“белый”) шум с единичной дисперсией. Следовательно, действие согласованного фильтра можно разбить на два этапа. На первом этапе производится “отбеливание” шума (и соответствующее преобразование входного изображения), а на втором – согласованная фильтрация полученного изображения фильтром, настроенным на преобразованное изображение объекта  и белый шум.
и белый шум.
Совмещение изображений. Линейный прогноз
Необходимость совмещения изображений возникает при решении таких задач как выявление отличий в серии изображений, анализ движения, объединение информации от различных сенсоров. В общем случае отличия в изображениях могут заключаться в некоторых преобразованиях координат и яркости (возможно, нелинейных), и задача совмещения заключается не только в корректном выполнении этих преобразований, но и, как правило, в предварительном оценивании параметров преобразований. Далее будет рассмотрен сравнительно простой случай совмещения изображений, когда изображения отличаются только сдвигом по координатам и линейным преобразованием яркости. Формально такую ситуацию можно представить следующим образом. Даны два непрерывных изображения (рис. 5.9),  и
и ![]() , которые связаны друг с другом соотношением
, которые связаны друг с другом соотношением
![]() , (5.22)
, (5.22)
где ![]() и
и ![]() - сдвиги вдоль координат, а
- сдвиги вдоль координат, а ![]() и
и ![]() - параметры линейного преобразования яркости.
- параметры линейного преобразования яркости.
|
Рис. 5.9. Сдвинутые линейно преобразованные по яркости изображения |
В результате дискретизации получим соответствующие дискретные изображения
![]() ,
, ![]() ,
, ![]() , (5.22)
, (5.22)
![]() , (5.23)
, (5.23)
где ![]() ,
, ![]() интервалы дискретизации соответственно вдоль осей
интервалы дискретизации соответственно вдоль осей ![]() и
и ![]() ,
, ![]() ,
, ![]() ,
,  ,
,  ,
, ![]() - целая часть от
- целая часть от ![]() .
.
Если смещения ![]() и
и ![]() кратны соответствующим интервалам дискретизации, то
кратны соответствующим интервалам дискретизации, то ![]() ,
,![]() = 0, и, следовательно,
= 0, и, следовательно,
![]() . (5.23а)
. (5.23а)
В этом случае неизвестные параметры сдвига можно найти, вычислив взаимную ковариационную функцию изображений ![]() и
и ![]() при различных их взаимных сдвигах
при различных их взаимных сдвигах ![]() и
и ![]() :
:
 , (5.24)
, (5.24)
где ![]() - область перекрытия изображения
- область перекрытия изображения ![]() и сдвинутого на
и сдвинутого на ![]() ,
, ![]() изображения
изображения ![]() (рис. 5.9),
(рис. 5.9),
![]() ,
, ![]() - средние значения изображений
- средние значения изображений ![]() и
и ![]() , вычисленные по области
, вычисленные по области ![]() ,
,
![]() - количество точек в области
- количество точек в области ![]() .
.
|
Рис. 5.10. Вычисление взаимной ковариационной функции |
В соответствии с известным неравенством Коши-Шварца максимального значения взаимная ковариационная функция достигает при ![]() ,
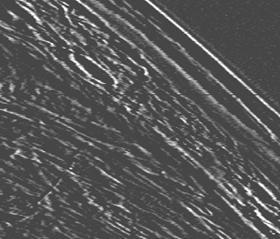
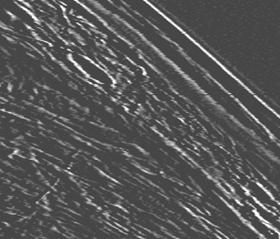
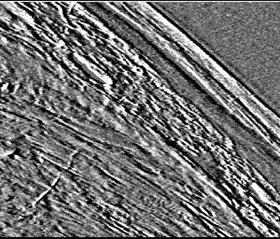
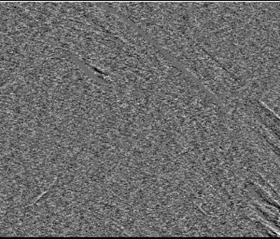
, ![]() . Поэтому, находя координаты максимума взаимной ковариационной функции, можно определить сдвиг одного изображения относительно другого, после чего изображения можно совместить посредством целочисленного сдвига. Пример целочисленного совмещения показан на рис. 5.11. Изображения на рис. 5.11а и 5.11б получены одним и тем же датчиком при неизменных условиях освещения. Тем не менее, они значительно отличаются друг от друга, причем отличия нельзя объяснить только шумом регистрации, поскольку их разность (рис. 5.11в) имеет явно не случайную пространственную структуру. Оценка сдвига, выполненная на основании поиска максимума взаимной ковариационной функции, показывает, что второе изображение сдвинуто влево относительно первого на два шага. Их разность, вычисленная после компенсации сдвига и вчетверо усиленная, показана на рис. 5.11г. Здесь неслучайная структура заметно ослаблена, однако еще достаточно заметна. Связано это с наличием дробной компоненты сдвига (т. е
. Поэтому, находя координаты максимума взаимной ковариационной функции, можно определить сдвиг одного изображения относительно другого, после чего изображения можно совместить посредством целочисленного сдвига. Пример целочисленного совмещения показан на рис. 5.11. Изображения на рис. 5.11а и 5.11б получены одним и тем же датчиком при неизменных условиях освещения. Тем не менее, они значительно отличаются друг от друга, причем отличия нельзя объяснить только шумом регистрации, поскольку их разность (рис. 5.11в) имеет явно не случайную пространственную структуру. Оценка сдвига, выполненная на основании поиска максимума взаимной ковариационной функции, показывает, что второе изображение сдвинуто влево относительно первого на два шага. Их разность, вычисленная после компенсации сдвига и вчетверо усиленная, показана на рис. 5.11г. Здесь неслучайная структура заметно ослаблена, однако еще достаточно заметна. Связано это с наличием дробной компоненты сдвига (т. е ![]() или
или ![]() не равны нулю). Компенсация дробного сдвига в дискретных изображениях является более сложной, чем рассмотренная выше, задачей. Один из вариантов ее решения заключается в интерполяции изображений на более подробную решетку, оценивании сдвига, компенсации его на подробной решетке и возвращении к исходной решетке. Существует, однако, другой подход, использующий знание корреляционных связей между элементами изображений. Будем снова рассматривать изображения
не равны нулю). Компенсация дробного сдвига в дискретных изображениях является более сложной, чем рассмотренная выше, задачей. Один из вариантов ее решения заключается в интерполяции изображений на более подробную решетку, оценивании сдвига, компенсации его на подробной решетке и возвращении к исходной решетке. Существует, однако, другой подход, использующий знание корреляционных связей между элементами изображений. Будем снова рассматривать изображения ![]() и
и ![]() как реализацию стационарного случайного процесса и предположим, что значение изображения
как реализацию стационарного случайного процесса и предположим, что значение изображения ![]() в точке (
в точке (![]() ) можно представить в виде
) можно представить в виде
![]() ,
, ![]() ,
,
где ![]() некоторая окрестность точки (
некоторая окрестность точки (![]() ),
), ![]() - неизвестные интерполяционные коэффициенты, а
- неизвестные интерполяционные коэффициенты, а ![]() - случайный шум. Упорядочив каким-либо образом элементы изображения
- случайный шум. Упорядочив каким-либо образом элементы изображения ![]() в окрестности
в окрестности ![]() , это выражение можно представить в векторном виде
, это выражение можно представить в векторном виде
![]() . (5.25)
. (5.25)
|
|
а | б |
|
|
в | г |
Рис. 5.11 |
Значения интерполяционных коэффициентов выберем таким образом, чтобы минимизировать среднеквадратичную ошибку интерполяции
![]() . (5.26)
. (5.26)
Раскрывая в (5.26) скобки и вычисляя математическое ожидание, получим

где ![]() - вектор, содержащий коэффициенты корреляции между элементом изображения
- вектор, содержащий коэффициенты корреляции между элементом изображения ![]() и элементами соответствующей ему окрестности
и элементами соответствующей ему окрестности ![]() в изображении
в изображении ![]() (кросс-корреляционный вектор), а
(кросс-корреляционный вектор), а ![]() - корреляционная матрица вектора, построенного из элементов окрестности
- корреляционная матрица вектора, построенного из элементов окрестности ![]() . Поскольку ранее предполагалось, что
. Поскольку ранее предполагалось, что ![]() и
и ![]() являются реализацией стационарного процесса, вектор
являются реализацией стационарного процесса, вектор ![]() и матрица
и матрица ![]() от координат не зависят, поэтому индексы
от координат не зависят, поэтому индексы ![]() у них опущены.
у них опущены.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 |
