

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Получим систему трех алгебраических уравнений:
Решив систему, определим коэффициенты a, b,c.
Найдем главный определитель системы Δ:
Найдем вспомогательные определители системы:
Найдем коэффициенты a, b,c.
После нахождения коэффициентов a, b,c, получили полином второго порядка.
 .
.
Для оценки полученного полинома вычислим значения функции и сравним их с экспериментальными данными.
Найдем ![]()
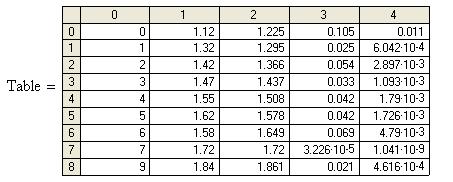
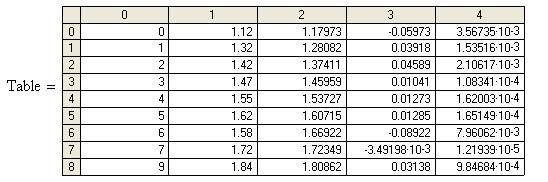
Полученные данные сведем в таблицу.
Таблица 3 - Результаты вычисления
i | X | Y |
|
|
|
1 | 0 | 1.12 | 1.182 | -0.062 | 0.003844 |
2 | 1 | 1.32 | 1.280 | 0.04 | 0.0016 |
3 | 2 | 1.42 | 1.371 | 0.049 | 0.002401 |
4 | 3 | 1.47 | 1.455 | 0.015 | 0.000225 |
5 | 4 | 1.55 | 1.531 | 0.019 | 0.000361 |
6 | 5 | 1.62 | 1.601 | 0.019 | 0.000361 |
7 | 6 | 1.58 | 1.662 | -0.082 | 0.006724 |
8 | 7 | 1.72 | 1.717 | 0.003 | 0. |
9 | 9 | 1.84 | 1.805 | 0.035 | 0.001225 |
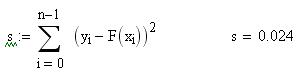
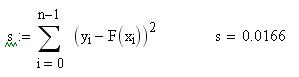
Найдем сумму квадратов отклонений ![]()
Сравнивая суммы квадратов отклонений видно, что полином второго порядка точнее описывает поведение объекта, чем полином первого порядка.
Следовательно, чем выше степень полинома, тем точнее он описывает поведение объекта.
1.3Построение статической модели обьекта с помощью ЭВМ
1.3.1 Решение СЛАУ методом регрессионного анализа
Для приближения данных часто используют вид линейной регрессии. Коэффициенты a и b вычисляются из условия минимизации суммы квадратов ошибок. Функция slope(x, y)-вычисляет коэффициент линейной части регрессии, а функция intercept(x, y)-вычисляет смещение по оси y.
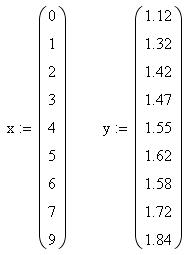
Векторы исходных данных
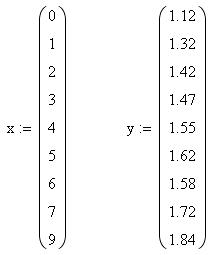
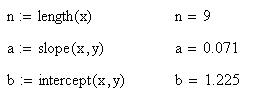
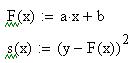
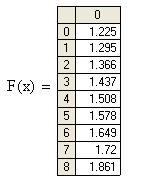
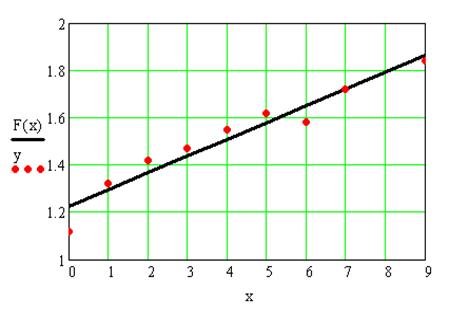
Рисунок 1 – Статическая характеристика

Таблица 4 – Результаты вычислений на ЭВМ
Сумма квадратов отклонений
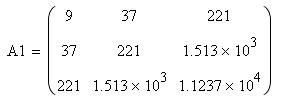
1.3.2 Решение СЛАУ методом Гаусса
Метод Гаусса основывается на решении квадратной матрицы составленной из СЛАУ. Для задания необходимой матрицы необходимо доопределить СЛАУ, поэтому используется матрица Вандермонда, которая получается при дополнении исходного вектора до квадратной матрицы путём возведения исходного вектора в соответствующую степень. Решение может быть найдено, если матрица является невырожденной, т. е. определитель исходной матрицы полученной из СЛАУ не равен нулю.
Векторы исходных данных
![]() - переход к созданию матрицы Вандермонда
- переход к созданию матрицы Вандермонда


Матрица коэффициентов системы уравнений
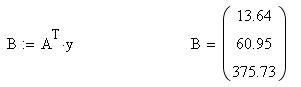
Вектор правых частей системы уравнений
 - решение системы уравнений
- решение системы уравнений
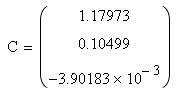

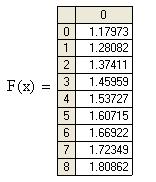
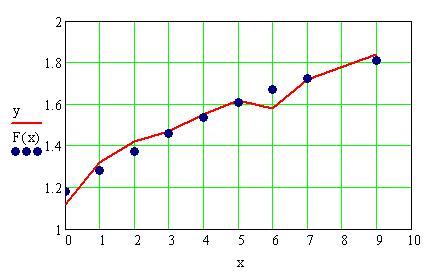
Рисунок 2 – Статическая характеристика

Таблица 5 – Результаты расчета на ЭВМ
Сумма квадратов отклонений
1.4 Расчет коэффициентов передачи
Для статистической модели первого порядка коэффициент передачи определяется как производная от выходной величины:
![]()
Для статистической модели второго порядка коэффициент передачи определяется как производная от выходной величины:

Расчет коэффициентов передачи производим при 10%, 50%, 90%.
Рассчитаем значение коэффициентов передачи при 10% по формуле:

где: -![]() = 1.84 – максимальное установившееся значение сигнала.
= 1.84 – максимальное установившееся значение сигнала.
-![]() = 1.12 – минимальное значение сигнала.
= 1.12 – минимальное значение сигнала.
Подставляя полученные данные, получим:
Из полученных корней квадратного уравнения в диапазон экспериментальных точек входит значение ![]()
Подставим значение ![]() в (1) и получим значение коэффициента передачи при 10% номинального режима:
в (1) и получим значение коэффициента передачи при 10% номинального режима:
![]()
Рассчитаем значение коэффициентов передачи при 50% по формуле:

Подставляя полученные данные, получим:
Выбираем  , т. к. только он входит в диапазон экспериментальных значений.
, т. к. только он входит в диапазон экспериментальных значений.
Подставим значение ![]() в (1) и получим значение коэффициента передачи при 50% номинального режима:
в (1) и получим значение коэффициента передачи при 50% номинального режима:

Рассчитаем значение коэффициентов передачи при 90% по формуле:

Подставляя полученные данные, получим:
Выбираем ![]() , т. к. только он входит в диапазон экспериментальных значений.
, т. к. только он входит в диапазон экспериментальных значений.
Подставим значение ![]() в (1) и получим значение коэффициента передачи при 90% номинального режима:
в (1) и получим значение коэффициента передачи при 90% номинального режима:

Полученные коэффициенты передачи при: 10%, 50%, 90% сведены в таблицу 6
Таблица 6 - Коэффициенты передачи.
10% | 50% | 90% | |
X | 0.02 | 0.596 | 1.172 |
K | 0.1 | 0.0976 | 0.102 |
2 Построение динамической модели объекта
Для составления уравнений динамики автоматическая система разбивается на элементы (звенья), и для каждого из них составляется соответствующее уравнение на основании того физического закона, который определяет процесс, происходящий в данном звене. Совокупность уравнений динамики, составленный для всех элементов автоматической системы, определяет процесс автоматического управления.
Так как процессы, протекающие в динамических объектах, очень многообразны, то в каждом отдельном случае необходим индивидуальный подход к конкретному объекту.
Если обозначить через ![]() физическую величину (параметр), действующую на вход элементарного звена, а через
физическую величину (параметр), действующую на вход элементарного звена, а через ![]() – выходную величину (параметр) этого звена, то в общем виде дифференциальное уравнение звена имеет вид:
– выходную величину (параметр) этого звена, то в общем виде дифференциальное уравнение звена имеет вид:
![]() ,
,
где n – степень дифференциального уравнения, которым описывается изменение ![]() ;
;
m – степень дифференциального уравнения, которым описывается изменение ![]() ;
;
t – время.
Уравнение  может быть нелинейным, т. е. часть коэффициентов
может быть нелинейным, т. е. часть коэффициентов ![]() или
или ![]() может зависеть от X или t, поэтому при дальнейших исследованиях пользование уравнением представляет определённое неудобство. В связи с этим все нелинейные зависимости линеаризуются путём разложения их в ряд Тейлора или Макларена и вводятся безразмерные координаты
может зависеть от X или t, поэтому при дальнейших исследованиях пользование уравнением представляет определённое неудобство. В связи с этим все нелинейные зависимости линеаризуются путём разложения их в ряд Тейлора или Макларена и вводятся безразмерные координаты
![]() ;
; ![]() ,
,
где ![]() и
и ![]() – базовые (например, максимальные или номинальные) значения X
– базовые (например, максимальные или номинальные) значения X
В некоторых задачах теории автоматического регулирования бывает удобно рассматривать в качестве безразмерных координат их отклонения от базовых значений, т. е.
![]() ;
; ![]() .
.
Линеаризовав, нелинейности и введя безразмерные координаты x, уравнение перепишем в виде:
![]() ,
,
где ai и bi – постоянные коэффициенты.
Необходимо рассчитать неизвестные коэффициенты и построить математическую модель.
Таблица 7- Динамическая характеристика объекта регулирования
i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| 0 | 0.01 | 0.04 | 0.16 | 0.42 | 0.83 | 0.91 | 0.96 | 1 |
Аппроксимация заданной динамической характеристики экспоненциальным выражением первого порядка реализует возможность получения аналитической зависимости. Сравнивая суммы квадратов отклонений для характеристик без запаздывания и с запаздыванием, выбираем наиболее приближенную к экспериментальным данным динамическую характеристику.
После расчета, выполненного вручную, следует проверить его на ЭВМ, а также произвести расчет динамической характеристики второго порядка и выбрать наиболее точную.
2.1 Ручной расчет коэффициентов для полинома первого порядка без запаздывания
Дифференциальное уравнение первого порядка записывается как:
![]() (2.1)
(2.1)
В теории автоматического регулирования принято приводить уравнение (2.1) к стандартному виду:
![]() (2.2)
(2.2)
где:  - постоянная времени;
- постоянная времени;
 - коэффициент передачи.
- коэффициент передачи.
Решение в общем, виде неоднородного дифференциального уравнения (2.2) ищется в виде суммы некоторого общего и частного решений:
![]() (2.3)
(2.3)
где:Yобщ - общее решение однородного дифференциального уравнения.
Yчаст - некоторое частное решение обычно при установлении переходного процесса неоднородного уравнения.
Найдем ![]() (t):
(t):
![]() (2.4)
(2.4)
Найдем![]() (t):
(t):
![]() (2.5)
(2.5)
Подставим (2.4) и (2.5) в (2.3):
![]() (2.6)
(2.6)
Найдем постоянную с при y(0)=0
![]()
Подставим с в (2.3): 
где: - установившееся значение;
- установившееся значение;
Найдем постоянную времени Т методом наименьших квадратов.
 (2.7)
(2.7)
Прологарифмируем выражение (2.7):
 (2.8)
(2.8)
где:
Рассчитаем ![]() для каждого момента времени t; и занесем в таблицу.
для каждого момента времени t; и занесем в таблицу.
где: yуст=1.861
Таблица 8 - Результаты расчета.
i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| 1 | 0.89 | 0.78 | 0.67 | 0.56 | 0.45 | 0.33 | 0.22 | 0.016 |
Составляем систему алгебраических уравнений:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
