

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()

Рисунок 30 –Годограф Найквиста для разомкнутой системы с ПИ-регулятором
Из рисунка видно, что годограф не охватывает точку с координатами ![]() , следовательно, разомкнутая система с ПИ-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
, следовательно, разомкнутая система с ПИ-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
7.2.3 Исследование на устойчивость САУ по критерию Гурвица
Нахождение корней полинома высокой степени без применения вычислительной техники в подавляющем большинстве случаев задача практически невыполнимая. Алгебраический критерий Гурвица позволяет решить вопрос об устойчивости системы без определения корней характеристического уравнения. Критерий составлен в виде определителя по определенному правилу и гласит, что для того чтобы характеристическое уравнение имело все корни с отрицательной вещественной частью, главный определитель Гурвица, а также все его диагональные миноры должны иметь один знак с коэффициентом при старшей производной выходной переменной.
Главный определитель Гурвица для уравнения n-й степени выглядит следующим образом:
-по главной диагонали выписывают все коэффициенты характеристического уравнения, начиная с коэффициента при (n-1)-й производной до свободного члена, затем столбцы дополняют вверх - коэффициентами с убывающими индексами, а вниз-с возрастающими.
Замкнутая система с П - регулятором по управляющему воздействию.
![]()
Образуем определитель Гурвица для этой передаточной функции и вычислим все необходимые значения.
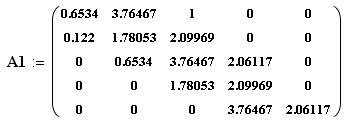
![]()
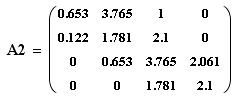
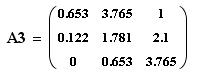
Составляем миноры и рассчитываем их значения:
![]()
![]()
![]()
![]()
![]()
![]()
Получили, что значения главного определителя и миноров положительны и совпадают по знаку с а5, в связи с чем делаем вывод о том, что система устойчива.
Замкнутая система с П - регулятором по управляющему воздействию.
Замкнутая система с И - регулятором по управляющему воздействию.
![]()
Образуем определитель Гурвица.
![]()
Составляем миноры и рассчитываем их значения:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Значения главного определителя и миноров совпадают по знаку с а5, следовательно система устойчива.
Замкнутая система с ПИ - регулятором по управляющему воздействию.
![]()
Образуем определитель Гурвица:
![]()
Составляем миноры и рассчитываем их значения:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Получили, что значения главного определителя и миноров положительны и совпадают по знаку с а5, в связи, с чем делаем вывод о том, что система устойчива.
7.2.4 Исследование на устойчивость САУ по частотному критерию Михайлова
Для исследования устойчивости замкнутой системы по критерию Михайлова строится годограф вектора характеристического уравнения знаменателя замкнутой системы при изменении частоты ![]() от
от ![]() до
до ![]() . Для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова при изменении частоты от
. Для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова при изменении частоты от ![]() до
до ![]() , начав свое движение с положительной действительной полуоси и вращаясь против часовой стрелки, последовательно проходил
, начав свое движение с положительной действительной полуоси и вращаясь против часовой стрелки, последовательно проходил ![]() квадрантов, нигде не обращаясь в нуль (где
квадрантов, нигде не обращаясь в нуль (где ![]() - порядок характеристического уравнения).
- порядок характеристического уравнения).
Таким образом, для исследования системы на устойчивость по критерию Михайлова необходимо построить годограф знаменателя передаточной функции замкнутой системы и по его виду оценить ее устойчивость.
Необходимо заметить, что для адекватного отображения годографа в области малых и больших частот часто приходиться строить несколько вариантов этого годографа в различных диапазонах частот, чтобы просмотреть его поведение во всем диапазоне.
Замкнутая система с П – регулятором по возмущению.

![]()
![]()

![]()
![]()
![]()
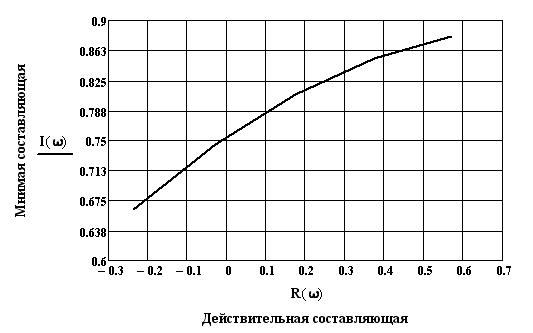
Рисунок 31 – Годограф Михайлова в области частот ![]()
![]()
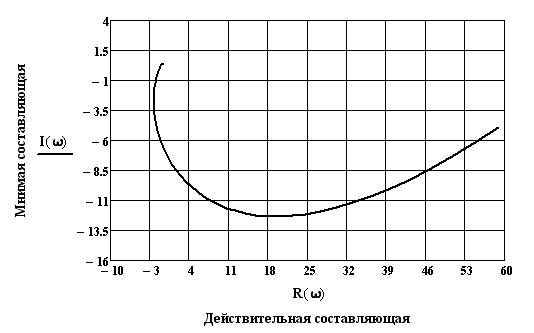
Рисунок 32 – Годограф Михайлова в области частот ![]()
![]()
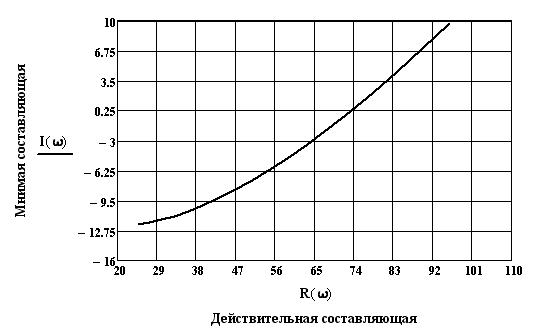
Рисунок 33 – Годограф Михайлова в области частот 
Из графиков видно, что годограф проходит 5 квадрантов, начав свое движение с положительной действительной полуоси, вращаясь последовательно против часовой стрелки нигде не обращаясь в нуль. Таким образом, замкнутая система с П-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Михайлова.
Замкнутая система с И - регулятором по возмущению.
![]()
![]()
![]()

![]()
![]()
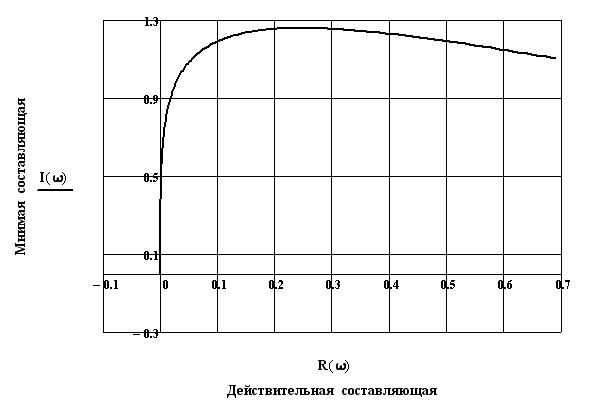
Рисунок 34 – Годограф Михайлова в диапазоне частот 
Изменим диапазон частоты ![]()
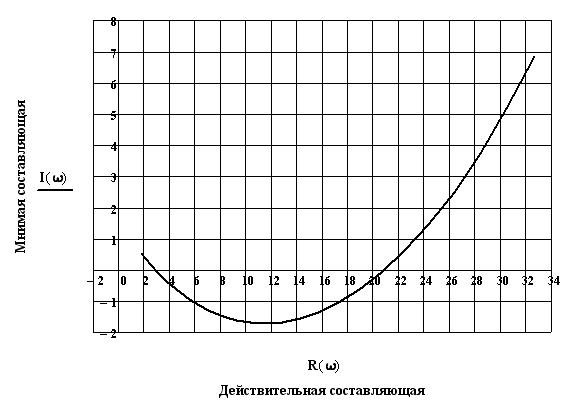
Рисунок 35 – Годограф Михайлова в диапазоне частот 
Из графиков видно, годограф проходит 3 квадранта, начав свое движение с положительной действительной полуоси, вращаясь последовательно против часовой стрелки нигде не обращаясь в нуль. Таким образом, замкнутая система с И - регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Михайлова.
Замкнутая система с ПИ - регулятором по возмущению.
![]()
![]()

![]()



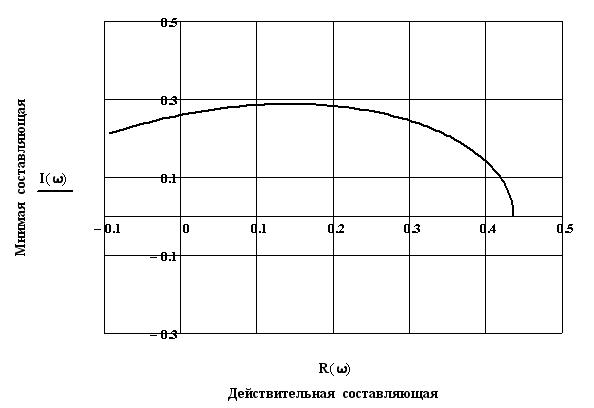
Рисунок 36 – Годограф Михайлова в диапазоне частот
Изменим диапазон частоты ![]()
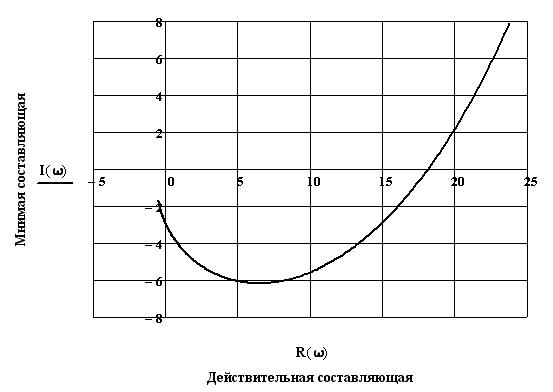
Рисунок 37 – Годограф Михайлова в диапазоне частот 
Из графиков видно, годограф проходит 5 квадрантов, начав свое движение с положительной действительной полуоси, вращаясь последовательно против часовой стрелки нигде не обращаясь в нуль. Таким образом, замкнутая система с ПИ - регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Михайлова.
8 Построение переходных процессов
8.1 Постановка задачи. Обзор методов решения
Несмотря на то, что ряд оценок качества функционирования САУ могут быть вычислены без построения таблиц и графиков переходных процессов, тем не менее, окончательный ответ о пригодности системы можно получить только по результатам исследования переходных процессов. Поэтому на завершающей стадии проектирования САУ всегда стремятся тем или иным способом получить оценки динамических характеристик системы и сравнить их с заданными.
Переходные процессы рассчитывают для замкнутых САУ по возмущающему и управляющему воздействиям. Если переходные процессы рассчитываются для замкнутых САУ по возмущению, то регулятор должен в течение переходного процесса скомпенсировать это возмущение, а объект – вернуться в исходное состояние, в котором он был до приложения возмущения. Если же переходные процессы рассчитываются для замкнутых САУ по управлению, то регулятор должен отработать управляющее воздействие и регулируемая величина на выходе объекта должна принять заданное значение.
При использовании для построения переходных процессов любых методов (аналитических, численных) в качестве исходного материала необходимо иметь математическую модель замкнутой системы в форме передаточной функции или ДУ.
Если передаточная функция замкнутой системы приведена к ДУ с произвольной правой частью, то аналитическое решение ищется в следующей последовательности:
– находятся корни характеристического уравнения;
– строится частное решение с неопределенными коэффициентами;
– полученное частное решение подставляется в исходное уравнение;
– после приравнивания коэффициентов при одинаковых степенях х находятся все неопределенные коэффициенты;
– записывается искомое частное решение.
Это решение и будет являться зависимостью выходной координаты системы от времени.
При использовании численных методов для построения переходных процессов необходимо:
– передаточную функцию замкнутой системы преобразовать в ДУ;
– ДУ n порядка привести к нормальной системе, состоящей из n ДУ первого порядка;
– задать уравнение для возмущающего воздействия;
– выбрать один из численных методов для решения полученной системы;
– составить программу на ЭВМ для решения полученной системы ДУ и построения переходных процессов.
Существует множество численных методов для решения поставленной задачи, вот некоторые из них:
1) метод Эйлера; интегрирование ДУ этим методом аналогично вычислению определенного интеграла по методу левых прямоугольников:
2) модифицированный метод Эйлера аналогичен методу средних прямоугольников:
 ;
;
недостатком данного метода являются двойные затраты на решение;
3) усовершенствованный метод Эйлера-Коши аналогичен методу трапеций:
 ;
;
4) метод Эйлера-Коши с итерациями:
 ;
;
в данном методе приближенное решение используется для уточнения этого же решения (подстановка в правую часть), эта итерация продолжается до обеспечения требуемой точности; если точность не достигается за заданное количество итераций, то либо нужно изменить дополнительное число итераций, либо уменьшить требуемую точность;
|
6) метод Рунге-Кутта:
 ;
;
7) экстраполяционные методы; в их основе лежит получение решения в последующей точке через найденные решения в предыдущих точках;
8) методы решения для жестких систем (метод Гира, метод Штера, метод Булирша); для этого вычисляется матрица Якоби:
8.2 Приведение к системе дифференциальных уравнений (ручной расчёт)
Система дифференциальных уравнений устанавливает связь выходной координаты с входными координатами в переходном процессе. То есть если передаточная характеристика системы имеет вид:
то связь выходной координаты с входной можно записать так:

для приведения к системе дифференциальных уравнений выполняем следующие действия:
- все члены правой части переносим в левую часть и группируем члены с одинаковыми порядками производных:

- формально интегрируем полученное уравнение (порядок уравнения во всех членах уменьшается на 1). Интегрирование выполняется до тех пор, пока не исчезнут все ![]() в левой части.
в левой части.
8.2.1 Замкнутая система с П – регулятором по возмущению
Передаточной функцией системы автоматического регулирования с П регулятором по возмущению является найденное ранее выражение:
![]()
Тогда в соответствии с выше ранее изложенным, запишем:

Понизим порядок этого уравнения формальным интегрированием и получим:

![]()
где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]() ,
,
Заменив, ![]() на y4 получим что:
на y4 получим что:
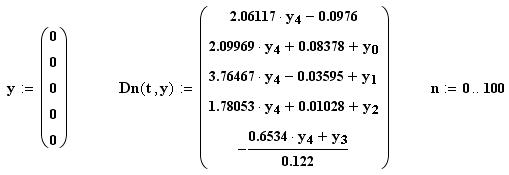
Получили систему нормальных уравнений:
8.2.2 Замкнутая система с П – регулятором по управлению
Передаточной функцией системы автоматического регулирования с П регулятором по управлению является найденное ранее выражение:

Тогда в соответствии с выше ранее изложенным, запишем:

Понизим порядок этого уравнения формальным интегрированием и получим:

![]()
где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]() ,
,
Заменив, ![]() на y4 получим что:
на y4 получим что:
Получили систему нормальных уравнений:
8.2.3 Замкнутая система с И – регулятором по возмущению
![]()
Тогда в соответствии с ранее изложенным, запишем:
![]()
Понизим порядок этого уравнения формальным интегрированием и получим:

![]()
где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
, 
Заменив, ![]() на y5 получим что:
на y5 получим что:
Получили систему нормальных уравнений:
8.2.4 Замкнутая система с И – регулятором по управлению
![]()
Тогда в соответствии с ранее изложенным, запишем:
![]()
Понизим порядок этого уравнения формальным интегрированием и получим:
![]()

где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:

В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]() ,
,
Заменив, ![]() на y5 получим что:
на y5 получим что:
Получили систему нормальных уравнений:
8.2.5 Замкнутая система с ПИ – регулятором по возмущению
![]()
Тогда в соответствии с ранее изложенным, запишем:
![]()
Понизим порядок этого уравнения формальным интегрированием и получим:

![]()
где  , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда ![]() .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
Заменив, ![]() на y5 получим что:
на y5 получим что:
Получили систему нормальных уравнений:
8.2.4 Замкнутая система с ПИ – регулятором по управлению
![]()
Тогда в соответствии с ранее изложенным, запишем:
![]()
Понизим порядок этого уравнения формальным интегрированием и получим:

![]() где
где ![]() , обозначим как -
, обозначим как - ![]() . Тогда
. Тогда  .
.
Проинтегрируем полученное выражение еще раз, подставив значение y1, и получим:

Заменим в данном выражении интеграл  значением y2 и еще раз проинтегрировав получим следующее выражение:
значением y2 и еще раз проинтегрировав получим следующее выражение:

В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
В полученном выражении делаем подстановку  и еще раз проинтегрируем:
и еще раз проинтегрируем:
![]()
Заменив, ![]() на y5 получим что:
на y5 получим что:
Получили систему нормальных уравнений:
8.3 Построение переходных процессов на ЭВМ в замкнутых системах по возмущению
8.3.1 Система с П – регулятором в системе Mathcad
![]()
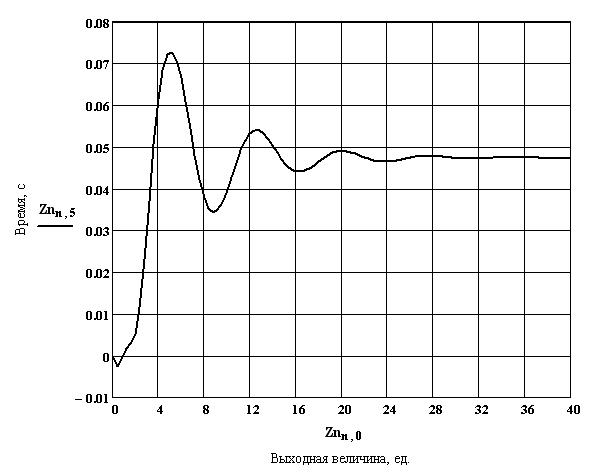
Рисунок 38 – График переходного процесса в замкнутой системе с
П-регулятором по возмущению
8.3.2 Система с П – регулятором в системе Matlab
B=[-0.018] – числитель передаточной функции
A=[0.53 3.76117] – знаменатель передаточной функции
Step(B, A) – функция решения системы дифференциальных уравнений
Рисунок 39 – График переходного процесса в замкнутой системе с
П-регулятором по возмущению
8.3.3 Система с И – регулятором в системе Mathcad
![]()
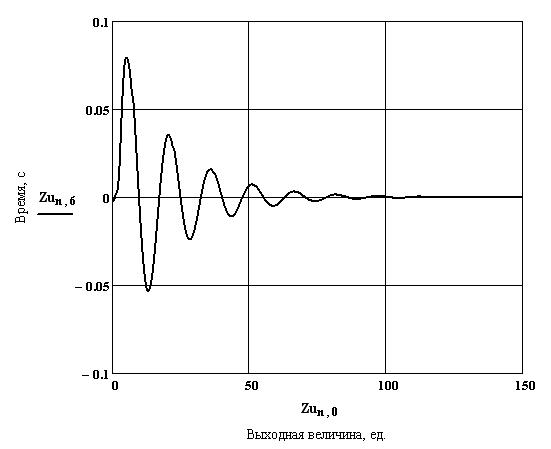
Рисунок 40 – График переходного процесса в замкнутой системе с
И-регулятором по возмущению
8.3.4 Система с И – регулятором в системе Matlab
B=[-0.018] – числитель передаточной функции
A=[0.3 3.34] – знаменатель передаточной функции
Step(B, A) – функция решения системы дифференциальных уравнений
Рисунок 41 – График переходного процесса в замкнутой системе с
И-регулятором по возмущению
8.3.5 Система с ПИ – регулятором в системе Mathcad
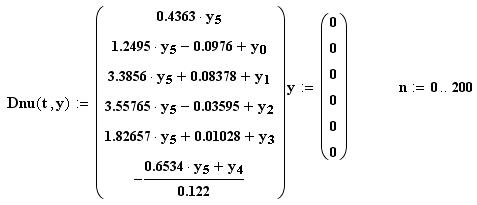
![]()
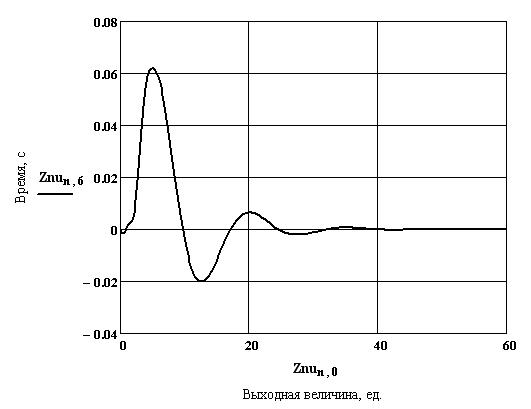
Рисунок 42 – График переходного процесса в замкнутой системе с
И-регулятором по возмущению
8.3.6 Система с ПИ – регулятором в системе Matlab
B=[-0.018] - числитель передаточной функции

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
