

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для П-регулятора будем иметь следующие расчетные соотношения:
Kп = Rp = R0 (m,) / [R20 (m,) + I20 (m,)],
п (m, w)= + 0 (m, w).
















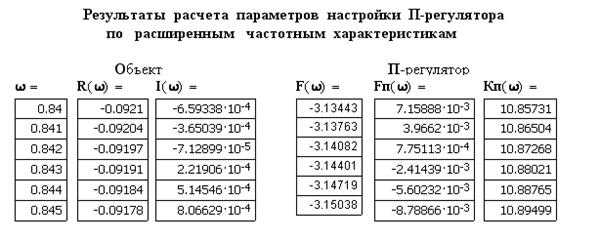
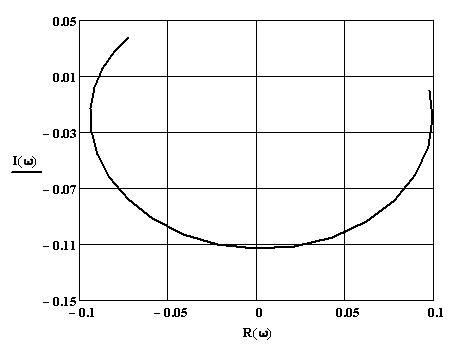
Рисунок 20 – АФХ объекта
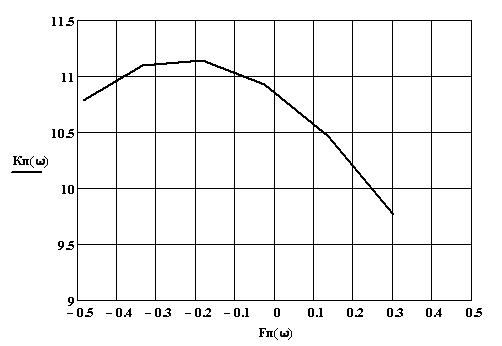
Рисунок 21 – Кп П-регулятора
Коэффициент передачи П - регулятора ![]() , будем выбирать, при нулевом фазовом составляющей. Таким образом, при
, будем выбирать, при нулевом фазовом составляющей. Таким образом, при ![]() , KП=10.87268
, KП=10.87268
5.1.2 Ручной расчет И – регулятора
Для И – регулятора передаточная характеристика имеет вид:

Заменив комплексную переменную ![]() на
на  получим выражение вида:
получим выражение вида:


Действительная часть:
Мнимая часть:
Выразим ![]() :
:
 возьмем из таблицы 10.
возьмем из таблицы 10.
Найдём значение ![]() для некоторых частот, результаты вычислений сведем в таблицу.
для некоторых частот, результаты вычислений сведем в таблицу.
Таблица 11 - Результаты вычислений.
|
|
|
|
0 | 0.098 | 0 | 0 |
0.1 | 0.119 | -0.031 | 3.735 |
0.3 | 0.1 | -0.129 | 3.754 |
0.5 | 0.048 | -0.039 | 5.956 |
0.75 | 0.03 | 0.0036 | 15.595 |
5.1.2.2 Машинный расчёт И – регулятора
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

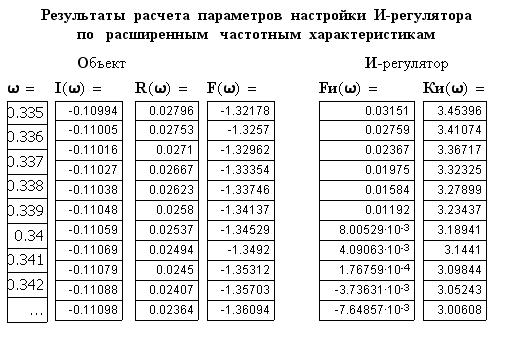
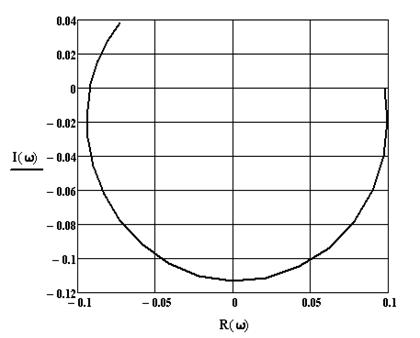
Рисунок 22 – АФХ объекта
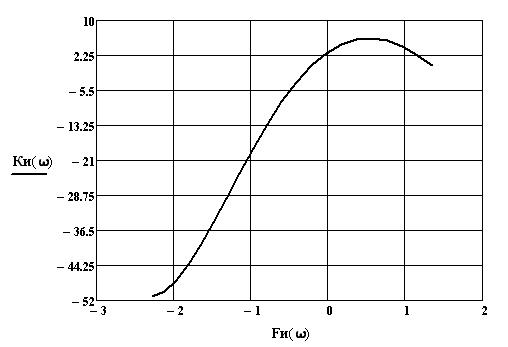
Рисунок 23 – Ки И – регулятора
Коэффициент передачи И-регулятора ![]() , будем выбирать, при нулевом фазовом составляющей. Таким образом, при
, будем выбирать, при нулевом фазовом составляющей. Таким образом, при  , КИ=3.09844
, КИ=3.09844
5.1.3 Ручной расчет ПИ – регулятора
Для ПИ – регулятора передаточная характеристика имеет вид:
![]()
Заменив комплексную переменную ![]() на получим выражение вида:
на получим выражение вида:

Отсюда выразим действительные и мнимые части:
Выразим 
Найдем численные значения  для ряда частот, результаты сведем в таблицу.
для ряда частот, результаты сведем в таблицу.
Таблица 12 - Результаты вычислений.
|
|
|
|
|
0 | 0.098 | 0 | 0 | -10.204 |
0.1 | 0.119 | -0.031 | 3.735 | 0.0006432 |
0.3 | 0.1 | -0.129 | 3.754 | -1.117 |
0.5 | 0.048 | -0.039 | 5.956 | -10.039 |
0.75 | 0.03 | 0.0036 | 15.595 | -9.28 |
5.1.3.3 Машинный расчёт ПИ – регулятора
![]()
![]()
![]()
![]()

![]()
![]()
![]()


![]()
![]()
![]()
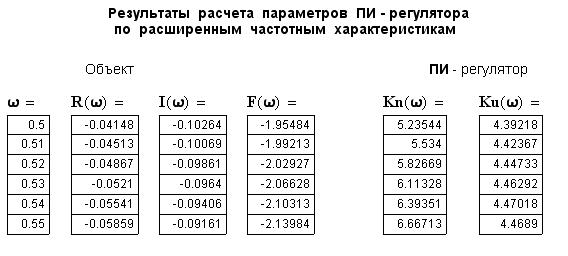
По данным расчётов построим график амплитудно-фазовой характеристики и графическую зависимость ![]() ,
,![]() ПИ – регулятора от фазовой составляющей входного сигнала (рис.24, 25):
ПИ – регулятора от фазовой составляющей входного сигнала (рис.24, 25):
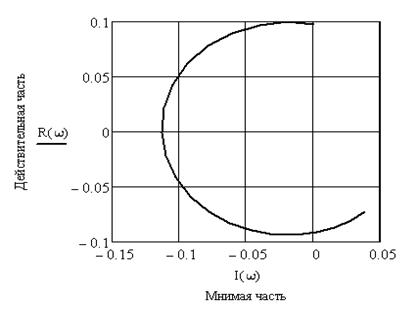
Рисунок 24 – АФХ объекта
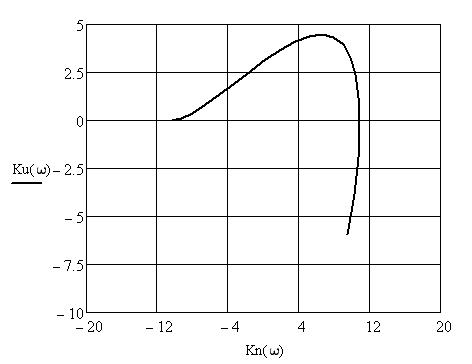
Рисунок 25 - КП, КИ ПИ – регулятора
Коэффициенты передачи ПИ-регулятора ![]() и
и ![]() , будем выбирать, при максимальном значении коэффициента передачи И - составляющей. Таким образом, при
, будем выбирать, при максимальном значении коэффициента передачи И - составляющей. Таким образом, при ![]() , КП=6.39351, КИ=4.47018
, КП=6.39351, КИ=4.47018
Полученные значения коэффициентов передачи для каждого типа регулятора сведём в одну таблицу 15:
Таблица 13 – Значения коэффициентов передачи для различного типа регуляторов.
Вид регулятора: | |||
П | И | ПИ | |
Кп | 10,87268 | - | 6,39351 |
Ки | - | 3,09844 | 4,47018 |
6 Передаточные функции САУ
6.1 Разомкнутые системы
Структурная схема разомкнутой САУ изображена на рисунке 26.
Рисунок 26 – Структурная схема разомкнутой системы
Передаточной функцией такой системы будет следующее выражение:
![]() ,
,
где Wo(p) – передаточная функция объекта;
Wp(p) – передаточная функция регулятора.
В нашем случае
![]() ,
,
а для регуляторов имеем следующие соотношения:
1) для П – регулятора ![]() ;
;
2) для И - регулятора; 
3) для ПИ - регулятора ![]() .
.
Запишем передаточные функции разомкнутых систем с тремя регуляторами:
1) с П - регулятором:
![]()
![]()
![]() ;
;
2) с И - регулятором:
![]()
![]() ;
;
![]()
3) с ПИ - регулятором:
![]()
![]()
. ![]()
6.2 Замкнутые системы
Структурная схема замкнутой САУ изображена на рисунке 21:
Рисунок 27 – Структурная схема замкнутой системы
Передаточной функцией такой системы будут выражения:
1) по возмущению  ;
;
2) по управлению  .
.
Подставив все известные выражения передаточных функций объекта регулирования и регуляторов, получим передаточные функции замкнутых систем с различными регуляторами:
1) с П - регулятором:
![]()
![]() ;
;
2) с И - регулятором:

![]()
3) с ПИ - регулятором:
 ;
;

7 Исследование на устойчивость систем автоматического управления
7.1 Постановка задачи
Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость.
Исследование замкнутых АСР на устойчивость предполагает получение ответов на следующие вопросы. Является ли система с рассчитанным регулятором устойчивой, то есть, возвращается ли она в состояние равновесия при наличии возмущений? Какие из параметров системы (объекта и регулятора) и каким образом влияют на устойчивость? При каких предельных значениях параметров система становится неустойчивой? Каков запас устойчивости системы при заданных значениях параметров?
7.2 Методы исследования САУ на устойчивость
Для исследования на устойчивость замкнутых САУ разработано множество методов: определение устойчивости по корням характеристического уравнения, по критерию Гурвица, по критерию Рауса, по частотному критерию Михайлова, по частотному критерию Найквиста и другие.
Передаточную функцию замкнутой системы можно представить в виде:
![]() ,
,
где ![]() и
и ![]() - полиномы по степеням
- полиномы по степеням ![]() .
.
Уравнение  - характеристическое уравнение системы, описывающее невозмущенное состояние.
- характеристическое уравнение системы, описывающее невозмущенное состояние.
Если все действительные корни характеристического уравнения и действительные части комплексных корней будут отрицательны, то система под воздействием любого возмущения, после его снятия, возвратится в исходное состояние, а значит, система будет устойчивой.
Критерий Гурвица
При оценке устойчивости из коэффициентов характеристического уравнения составляется определитель Гурвица вида:
 .
.
Для устойчивости САУ необходимо и достаточно, чтобы полный определитель Гурвица и все частные определители, образованные вычеркиванием соответствующих строк и столбцов были одного знака с ![]() .
.
Критерий Михайлова
При исследовании устойчивости строится годограф ![]() характеристического уравнения
характеристического уравнения ![]() замкнутой системы. Для устойчивости системы необходимо и достаточно, чтобы годограф
замкнутой системы. Для устойчивости системы необходимо и достаточно, чтобы годограф ![]() при изменении частоты от 0 до
при изменении частоты от 0 до ![]() , начиная с положительной действительной полуоси и двигаясь против часовой стрелки, последовательно проходил
, начиная с положительной действительной полуоси и двигаясь против часовой стрелки, последовательно проходил ![]() квадрантов (где
квадрантов (где ![]() – порядок полинома), нигде не обращаясь в нуль.
– порядок полинома), нигде не обращаясь в нуль.
Критерий устойчивости Найквиста
Данный критерий формулируется следующим образом: если разомкнутая система устойчива, то для устойчивости системы в замкнутом состоянии необходимо и достаточно, чтобы амплитудно-фазовая характеристика разомкнутой системы не охватывала точку на действительной оси с координатами ![]() . Расстояние от этой точки до точки пересечения годографа с действительной осью называется запасом устойчивости.
. Расстояние от этой точки до точки пересечения годографа с действительной осью называется запасом устойчивости.
Необходимо отметить, что при исследованиях на устойчивость по критериям Михайлова и Найквиста рассчитываются и строятся графики АФХ характеристического уравнения (критерий Михайлова) или разомкнутой АСР (критерий Найквиста), что является трудоемкой задачей. Поэтому для построения АФХ используется ЭВМ.
7.2.1 Исследование на устойчивость САУ по корням характеристического уравнения
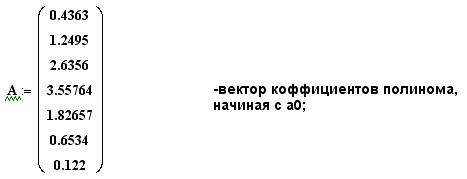
Для определения устойчивости системы необходимо вычислить корни полинома знаменателя. Для этого выделим полином знаменателя, воспользовавшись системой аналитических преобразований и образуем вектор коэффициентов этого полинома. Для нахождения воспользуемся функцией polyroots(X).
Замкнутая система с П - регулятором по возмущению:
![]()
Выделим коэффициенты полинома знаменателя, обозначим полученный вектор через, А и вычислим корни:
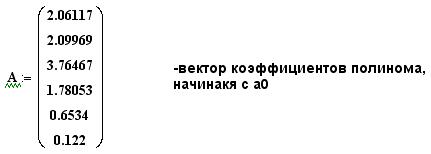
![]()
Анализ корней показывает, что система устойчива, поскольку все корни расположены в левой полуплоскости.
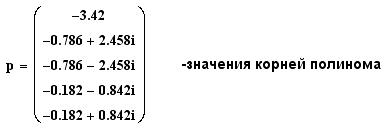
Замкнутая система с И - регулятором по возмущению:
![]()
![]()
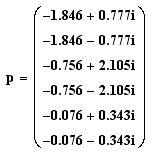
Анализ корней показывает, что система устойчива, поскольку все корни расположены в левой полуплоскости.
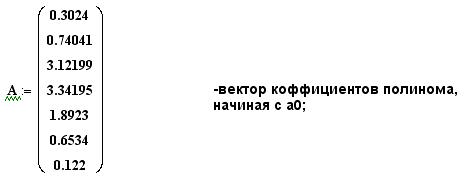
Замкнутая система с ПИ - регулятором по возмущению:
![]()
![]()
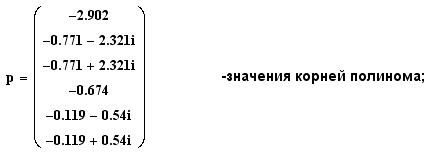
Анализ корней показывает, что система устойчива, поскольку все корни расположены в левой полуплоскости.
7.2.2 Исследование на устойчивость САУ по частотному критерию Найквиста
Частотный критерий устойчивости Найквиста формулируется следующим образом. Если разомкнутая система устойчива, то для устойчивости системы в замкнутом состоянии необходимо и достаточно, чтобы амплитудно-фазовая характеристика разомкнутой системы не охватывала точку на действительной оси с координатами (-1, i0).
Таким образом, для исследования системы по критерию Найквиста необходимо образовать передаточную функцию, построить годограф АФХ разомкнутой системы и исследовать его поведение в окрестности этой точки.
Для построения годографа Найквиста переходим в выражении передаточной функции от переменной р к переменной ![]() и строим АФХ по вещественной и мнимой составляющим полученного выражения.
и строим АФХ по вещественной и мнимой составляющим полученного выражения.
Разомкнутая система с П-регулятором:
![]()
![]()
![]()

![]()
![]()

Рисунок 28 – Годограф Найквиста для разомкнутой системы с П-регулятором
Из рисунка видно, что годограф не охватывает точку с координатами ![]() , следовательно, разомкнутая система с П-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
, следовательно, разомкнутая система с П-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
Разомкнутая система с И - регулятором:
![]()
![]()
![]()

![]()
![]()
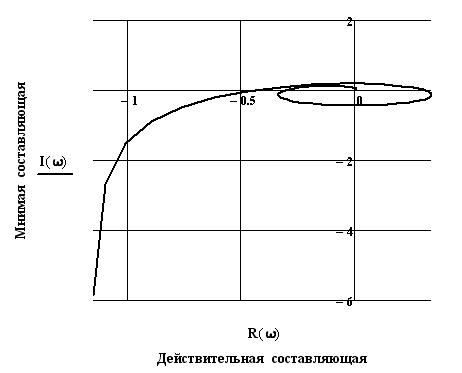
Рисунок 29 – Годограф Найквиста для разомкнутой системы с И-регулятором
Из рисунка видно, что годограф не охватывает точку с координатами ![]() , следовательно, разомкнутая система с И-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
, следовательно, разомкнутая система с И-регулятором является устойчивой, так как выполняется необходимое и достаточное условие устойчивости по критерию Найквиста.
Разомкнутая система с ПИ - регулятором:
![]()
![]()
![]()

![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
